某BD系列轨道平台搬运车转向系统沉重分析及改进
2023-03-17邱光志唐岚
邱光志 唐岚


摘 要:根据某BD系列轨道平台搬运车的实际使用情况,发现该车在满足小转弯半径的情况下出现转向沉重问题。通过理论分析出转向沉重的原因,对转向摇臂、直拉杆、转向节臂的尺寸进行了改进,建立了该转向系统的AMESim模型,分析了改进后的效果,转向盘力阻力矩减小。经试车验证,转向盘阻力矩比模型中得出的阻力矩小,转向操纵轻便,满足使用要求。
关键词:轨道平台搬运车 转向沉重 AMESim模型 转向盘阻力矩
Abstract:According to the actual use of a BD series rail platform truck, it is found that the heavy steering problem occurs when the truck meets the small turning radius. Through the theoretical analysis of the reason of heavy steering, the dimensions of the steering rocker arm, straight tie rod and steering knuckle-arm are improved, the AMESim model of the steering system is established, and the improved effect is analyzed. The test results show that the steering wheel resistance moment is smaller than the resistance moment in the model, and the steering is easy to operate.
Key words:Rail platform truck; Turn to heavy; AMESim Modeling; Torque of steering wheel
1 前言
BD系列平台搬运车主要用于工厂车间、车站、码头等地,小巧灵活,操作方便,适用于短距离的货物运输[1]。主要有车体、前后桥、蓄电池组、转向器、悬挂系统、制动系统和电气系统组成[2]。使用蓄电池作为动力源,直流电动机驱动,运行噪音低、无任何污染,是在狭小空间载货服务的理想搬运车[3]。目前市面上此类车辆常采用齿轮齿条式和循环球式两种转向系统,应用较为广泛的是齿轮齿条式,但在某些特殊场地,装载重型货物的车辆上则使用循环球式转向系统,使用该种结构,车辆的载重质量增大,结构布置简单,同时也存在相应的问题,使用该种结构,如果传动系统设计不合理,结构布置不合适,则会出现转向沉重,操作不灵敏等相应问题[4]。
某BD系列轨道平台搬运车采用转向柱助力型的循环球式EPS系统,在使用过程中存在转向沉重,驾驶舒适性差,驾驶员偶尔出现过分紧张等问题[5]。根据循环球式EPS系统的传动方式,分析其转向沉重的原因并对其进行改进,建立AMEsim模型验证改进结果[6]。在不改变车辆最小转弯半径的情况下,经试车验证,转向操纵轻便,满足转向助力使用要求[7]。
2 EPS系统结构和工作原理
2.1 系统组成
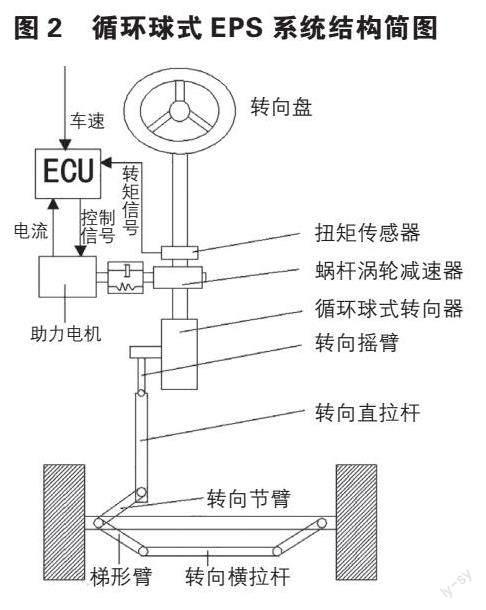
BD系列轨道平台搬运车的EPS系统基本组成结构如图2所示,主要包括:转向盘、转向管柱、转向盘转角和转矩传感器、车速传感器、电控单元、助力电机、减速机构、十字轴万向节、循环球式转向器、转向传动机构、转向轮等[8]。
2.2 系统工作原理
在驾驶员操纵方向盘时,扭矩传感器根据输入力的大小产生相应的电压信号,由此EPS系统就可以检测出转向力的大小,同时根据车速传感器产生的脉冲信号又可测出车速,再通过控制器控制助力电机的电流,为汽车在不同的车速下提供适当的转向助力效果,使汽车低速时转向轻便灵活,高速时稳定可靠[9]。
3 传动机构分析
BD系列轨道平台搬运车属于非标车,目前市面上的此类车型大多都是购买相应的零部件装配而成,甚至有些零部件属于厂家纯手工制作,设计可能不合理,无法满足正常使用要求。经询问得知,为满足车辆转弯半径足够小的使用要求,该车辆的转向摇臂、转向直拉杆、转向节臂是由制造商凭实践经验制作的,没有足够的理论指导。在实际使用中,车速V=0km/h时,转向沉重,几乎不能满足使用要求。为此,对转向器至转向轮之间的传动机构力传递进行分析[10]。
车辆的转向阻力矩主要包括主动阻力局和被动阻力矩两部分,在实际当中,转向阻力矩的计算十分繁琐和复杂,常采用具有足够精度的经验公式进行计算。计算公式为:
式中:f为轮胎与地面的摩擦系数,一般取0.7;G1为前轴负荷(N);p为轮胎压力(N/mm2)[11]。
通常前轴负荷按车辆满载时总质量的35%计算,实测车辆相关参数:G1=525N,p=0.3 N/mm2。按公式(1)计算出该车辆的转向阻力矩为Tr=1620.5N·m。该车辆的转向力通过转向节臂、转向直拉杆、转向摇臂传递,可按如下公式计算出在转向器输出端的阻力矩Tz,计算公式为:
式中:L1为转向摇臂长度(mm);L2为转向节臂长度(mm)。
经实际测量,L1=230mm,L2=120mm,根据公式(2)计算出转向器输出端阻力矩Tz=3105N·m。作用在方向盘上的手力可以参考:GB 7258-2017《机动车安全技术运行条件》,作用在方向盘上的手力应该小于400N[1]。
計算结果TZ远远大于该值,在驾驶过程中转向沉重,舒适性和安全性低。由于路面对车轮的阻力矩TR可以近似为恒定值,因此根据公式(2),减小TZ的值,即减小作用在方向盘上的手力,应该增加转向节臂L2的长度,减小转向摇臂L1的长度[12]。在满足该车最小转弯半径不变的情况下,设计出转向节臂长度L1=170mm,转向摇臂长度L2=180mm,转向直拉杆长度L3=720mm,如图3所示。按照公式(2)算得TZ=1530.5N,满足使用要求。
4 系统建模
转向操纵的轻便性常由驾驶员作用在转向盘上的手力和转向盘转动圈数决定[13]。导致搬运车转向沉重的因素有很多,在分析时应该首先确定问题所出现在的部位,针对该部位进一步判明在哪个部件。AMESim是个多学科领域复杂系统建模仿真平台,用户可以在这个单一平台上建立復杂的多学科领域的系统模型,并在此基础上进行仿真计算和深入分析[14]。在EPS系统中存在许多的非线性摩擦和阻尼,使用AMEsim软件可以大大简化系统的模型的建立[15]。建模仿真包含四个步骤:
AMEsim使用图形化建模方式,不需要使用复杂的数学模型推导,仿真效率高,使用方便。相关参数设置参照表1,控制策略采用传统的电流PI控制,在软件的信号控制库中,可以直接使用相应的物理模块。助力电机直接使用电子元件库中的直流无刷电动机。在仿真中,设置仿真时间为10s,曲线打印时间间隔为0.01s。
5 仿真结果分析
在模型中,设置转向盘转角输入范围为0-150°,如图5所示,转向摇臂轴的转角范围为0-20°,如图6所示,作用在方向盘上的扭矩最大值为374.97N·m,如图7所示,小于改进前的扭矩Tz,转向力矩小,转向轻便,满足实际使用要求。
6 实车验证
使用转向参数测试仪,在车速V=0km/h的状态下,测得转矩最大值TZ=270N·m,转向盘转角θ=200°。此时,转向轻便,操纵灵敏,实际测量值比仿真测试值小。
7 结语
(1)简述了目前市面上此类小转弯半径固定平台搬运车的现状以及相应的优缺点,指出了目前在生产过程中还存在的缺陷问题。
(2)非标车辆生产的量小,本身就是带缺陷的产品,改进的机会比较少,在生产和制造的过程中往往都是凭经验或者抄袭。分析并改进了某BD系列平台搬运车转向沉重的问题,为此类非标车辆的转向系统设计和调整提供相应的理论指导。
(3)建立了AMEsim模型,将改进后的作用在方向盘上的阻力矩进行计算分析,改进结果好,同时经过试车验证了模型的正确性,实际测得转向盘阻力矩更小,为后续此类车辆的研制提供理论依据。
参考文献:
[1]GB 7258-2017《机动车安全技术运行条件》.
[2]王延东,胡冠群.固定平台搬运车超载显示及报警装置[J].起重运输机械,2014(10):47-48.
[3]孙喜冬.新型微型电动车底盘设计及操纵稳定性分析[J].内燃机与配件,2019(24):39-40.
[4]王凯莉. 共享微型电动车造型设计研究[D].吉林大学,2019.
[5]J.Stein,R.Matheis,S.Fa bender,K.Seidel,范明强.具有轻型车身结构的微型电动车[J].汽车与新动力,2018,1(02):41-44.
[6]庄学功,钱瑞明.电动固定平台搬运车四轮转向系统的分析与设计[J].机械制造与自动化,2005(06):33-35+38.
[7]陈剑峰.BD2固定平台搬运车寿命预测[J].起重运输机械,1989(06):40-43+2.
[8]黄明宇,张政,邓佳文,陆琼晔,倪红军,周一丹.基于ADVISOR的氢电混合动力场地车仿真模型开发[J].系统仿真学报,2017,29(05):1041-1048.
[9]冯小保. 氢电混合动力场地车的研究[D].南通大学,2014.
[10]唐子淇,唐岚.基于PID控制的EPS系统建模仿真研究[J].重庆交通大学学报(自然科学版),2013,32(02):325-328.
[11]陈新月,麦云飞.电动助力转向系统的建模与仿真[J].农业装备与车辆工程,2018,56(09):71-74.
[12]王长明,李丽君,王怀谦,左鹏进,孙镇.某微型纯电动车转向系统力矩波动优化改进[J].汽车实用技术,2020(04):19-21.
[13]司婷婷. 电动助力转向系统关键部件力学特性分析与研究[D].重庆理工大学,2018.
[14]汪超.电动助力转向系统助力特性分析[J].农业装备与车辆工程,2019,57(07):107-109.
[15]谷娜,唐岚.基于AMEsim和Simulink的电动助力转向系统的联合仿真[J].客车技术与研究,2008(04):1-3.
