下肢运动学信息采集与步态识别系统研发
2023-03-17李剑锋王海东董明杰
李剑锋, 周 宇, 王海东, 董明杰
(北京工业大学材料与制造学部先进制造技术北京市重点实验室, 北京 100124)
康复、助力机器人主要应用于日常生活中,实现肢体康复、助老助残的目的[1-3]. 在下肢康复、助力机器人领域,为保证机器人能够对人体进行实时有效的助力,提高人机相容性,运动学信息采集技术被广泛地采用. 运动学信息采集系统为机器人控制提供人体实时的运动学信息,保证机器人与人体步态一致. 因此,运动学信息采集系统的开发成为下肢康复、助力机器人研发的关键技术之一[4-5].
近年来,国内外许多研究者注重于开发高集成性、高稳定性、高可靠性的运动学信息采集系统,并在实验中取得了较好的验证. 如Beravs等[6]基于惯性测量单元(inertial measurement unit,IMU)开发了体积小、结构开放、集成于下肢外骨骼式助力机器人的运动学信息采集系统,利用多个传感器数据获取了下肢各个关节角度信息,以光学运动捕捉系统采集的信息作为对比. Mueller等[7]开发了一种低成本的、可移动的检测系统,利用IMU和2个力传感器感知下肢步态信息和地面反应力及力矩,通过建立人体下肢运动学模型,利用扩展卡尔曼滤波(extended Kalman filter,EKF)融合加速度与角加速度信息得到关节角度. Seel等[8]设计了一种穿戴式的运动学信息采集设备,提出了一种使用陀螺仪和加速度计进行关节轴线识别及屈/伸关节角度测量的方法,测量数据与光学三维运动捕捉系统所测得的数据在膝关节屈伸运动下有3°左右的误差,在踝关节屈伸运动下有1°左右的误差. Hu等[9]提出了一种关节角度测量方法,将IMU放置在脚跟和骨盆,利用运动学逆解计算出髋、膝及踝关节的角度,与光学动作捕捉系统同时获得的测量值进行了对比验证. Park等[10]提出了一种7自由度的穿戴式下肢运动学信息采集机构,利用6个编码器、8个表面肌电信号传感器(surface electromyography, sEMG)和8个力传感器,分别在平地行走和上楼梯2种人体活动下进行了实验. 前述文献中开发的运动学信息采集系统多应用于外骨骼机器人中,对于柔性助力机器人涉及得较少,多采用有线传输增加了穿戴的不适感,另外多数研究者只在室内进行了平地行走实验,考虑到实际中康复、助力机器人应用在多种步态活动下,故运动学信息采集系统在多种步态活动下实验并进行识别分类是有必要的.
基于上述分析,本文针对下肢柔性助力机器人对无线传输、穿戴方便以及步态识别等特殊要求,开发了一种基于航姿参考模块(attitude and heading reference system, AHRS)的下肢柔性助力机器人运动学信息采集系统,该系统设计了6个微型航姿参考模块(MiniAHRS)用来感知人体运动姿态,实时输出姿态角,4个压力传感器固定在足底以对步态周期进行监测,利用ZigBee技术组建无线传感器网络完成数据传输,通过建立D-H模型实现下肢关节角度解算,上位机软件采用C#语言编写,能够完成采集的相关设置并实时显示人体运动过程中运动学信息的变化. 下肢柔性助力机器人运动学信息采集系统具有体积小、功耗低、无线传输、多通道、稳定性高及可靠性高等优点. 相应地,为了验证系统的性能,以Vicon系统采集的数据作为对比,在不同的步态活动(平地行走、上下楼梯、上下斜坡及原地蹲起)下进行了实验并利用决策树分类器对不同的步态活动进行了识别分类.
1 下肢柔性助力机器人系统
下肢柔性助力机器人因采用合成纤维材料而减少人体代谢的消耗和对关节活动范围的影响[11-12],而且能够避免和解决外骨骼助力出现的因人机关节难对齐、质量大导致的加剧人体代谢消耗问题[13-14]. 下肢柔性助力机器人结构简图如图1所示.
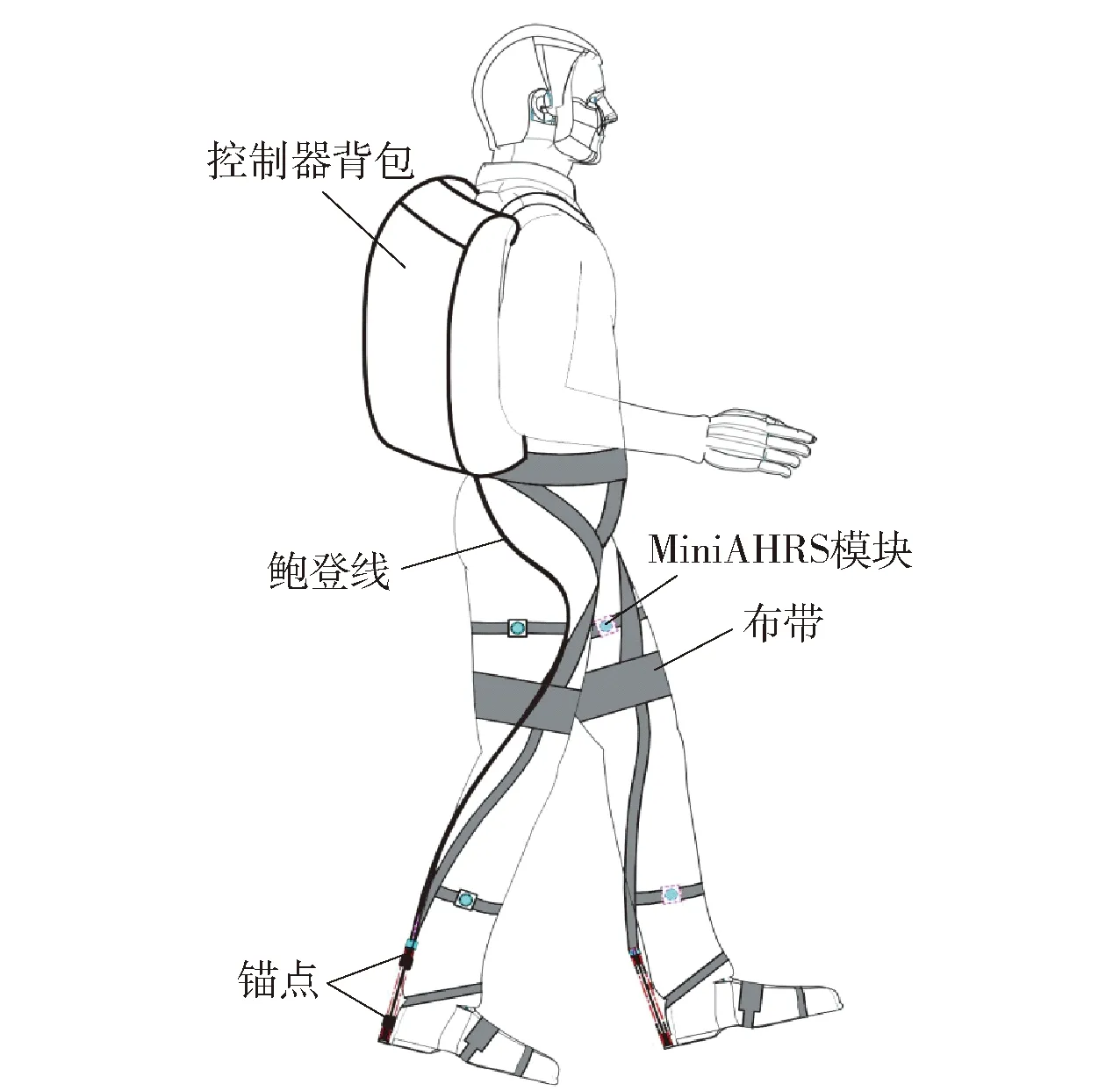
图1 下肢柔性助力机器人结构Fig.1 Structure of lower limb soft assistance robot
其工作原理为:背包中的控制器提供驱动力,该力通过鲍登线传递至下肢髋、膝、踝关节. 通过控制算法有规律地驱动鲍登线,带动下肢进行相应的步态运动,降低人体能量消耗,实现助力效果.
以人体骨骼为支撑结构的下肢助力机器人,其设计结合了人体步态运动原理,由步态运动原理知,一个完整的步态周期是指人体一侧足跟首次触地到再次触地的过程[15]. 一个步态周期中能量主要由髋关节和踝关节提供,所以优选髋、踝关节进行助力能够达到更好的助力效果[16]. 布带的分布轨迹是下肢柔性助力机器人结构设计的关键问题,为了使能量传递的效率达到最高并考虑人体穿戴机器人的舒适感,布带轨迹分布的设计简图和人体穿戴效果如图2所示.

图2 布带分布设计和人体穿戴效果Fig.2 Tape distribution trajectory and wearing effect
2 运动学信息采集系统设计
下肢柔性助力机器人运动学信息采集系统所采用的MiniAHRS分别安置在人体大小腿的矢状面(指前后方向,将人体分成左、右两部分的纵切面,与地平面垂直)和脚背,感知人体下肢姿态变化. 每一个步态周期的开始和结束依据足跟离地和足尖着地来划分,所以压力传感器安置在足底的脚跟和脚尖,对步态周期进行监测,系统流程如图3所示.

图3 运动学信息采集系统流程Fig.3 Flow chart of kinematics information acquisition system
人体穿戴机器人后,通过软件设置MiniAHRS的输出频率为100 Hz,并获得人体初始的姿态信息. 穿戴形式将引起MiniAHRS有微小的偏差,在人体开始运动前进行补偿校正以保证数据的精度,且MiniAHRS的数据以欧拉角的形式输出. 根据人体下肢关节运动特性建立运动学模型获取下肢运动学信息,通过决策树分类器对步态活动进行识别,最终由上位机接收数据信息并实时地显示人体运动过程中运动学信息的变化.
2.1 MiniAHRS设计
AHRS是一种由基于微机电系统(micro-electro-mechanical system,MEMS)的三轴陀螺仪、加速度计和磁强计组成惯性测量装置,能够提供载体在空间坐标系下准确且可靠的姿态信息[17]. MiniAHRS是针对下肢柔性助力机器人设计的姿态参考模块,具有体积小、功耗低、易集成的特点,并且能够良好地适应机器人的工作环境. MiniAHRS将陀螺仪、加速度计和磁强计通过I2C总线与ARM处理器相连,融合后的数据进入无线传感器网络进行传输,数据融合过程利用了KF计算出四元数的最优估计,由四元数得出载体的姿态角.
2.2 星型无线传感器网络组建
针对于下肢柔性助力机器人运动学信息采集系统在低功耗和数据无线传输距离以及准确率等方面的特殊要求,本文组建了一种基于CC2530芯片和ZigBee协议栈的星型无线传感器网络.
ZigBee依据设备在网络中起到的作用不同,分为协调器、路由节点及终端节点[18],不同的网络拓扑结构所采用的设备及它们起到的功能也不同,本文采用一个协调器(full functional device,FFD)和多个终端节点(reduced function device,RFD)组建了星型拓扑网络,拓扑结构如图4所示.

图4 星型拓扑结构图Fig.4 Structure of star topology
在星型网络中,协调器作为中央控制器对多个终端节点进行数据接收,并将数据通过RS232串口传输给上位机,同时协调器负责整个无线网络的组建、管理及维护. 终端节点负责采集MiniAHRS与压力传感器的数据,将传感器数据返回协调器中. 建网成功后,协调器对网络信号进行接收,当终端节点向协调器发送入网请求时,协调器同意并为其分配网络地址以完成关联,进而实现通信.
终端节点的设计包含采集功能模块、处理功能模块、电源模块及无线收发模块,硬件结构如图5所示,其中采集功能模块中MiniAHRS和压力传感器对数据进行采集和转换,处理功能模块对数据进行存储和处理,电源模块为终端节点提供运行所需能量,无线收发模块负责终端节点与协调器的数据通信.
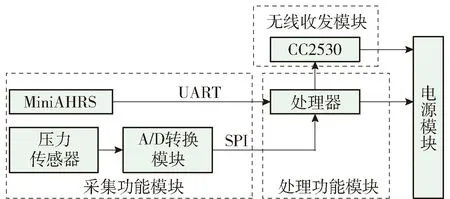
图5 终端节点硬件结构Fig.5 Terminal node hardware structure
3 关节角度转化与步态活动识别
3.1 建立运动学模型及角度转化
人体下肢的活动主要由髋、膝及踝关节的运动复合而成,在行走过程中主要以髋关节的前屈/后伸运动,膝关节的屈曲/过伸运动及踝关节的跖屈/背伸运动为主. 根据行走过程中各关节的主要运动形式,建立人体下肢运动学模型,由于各关节的主要运动均是在人体矢状面绕其转轴的转动,因此可以简化下肢为6-DOF的连杆机构,一侧拥有3个转动自由度,利用D-H法建立坐标系,根据各个关节之间的旋转变换关系实现角度转化.
如图6所示,以右腿为例,髋、膝及踝关节均被简化成转动副,采用D-H方法,在髋关节旋转中心建立固定坐标系O0x0y0z0,其与MiniAHRS的导航坐标系姿态相同,x0轴由髋关节旋转中心O0垂直指向地面,y0轴与x0轴垂直,由O0指向人体前方,z0轴由右手法则确定.分别在髋、膝及踝关节建立坐标系Oixiyizi(i=1,2,3),xi轴的方向由连杆i指向连杆i+1,zi轴均与z0轴同向,yi轴由右手定则确定.在MiniAHRS放置的位置处建立传感器载体坐标系Osjxsjysjzsj(j=1,2,3).如图6(b)所示,载体坐标系Osjxsjysjzsj(j=1,2,3)各轴方向与Oixiyizi(i=1,2,3)指向相同,不存在旋转变换,因此能够表示髋、膝及踝关节的姿态信息,连杆各关节变量由θk(k=1,2,3)表示.

图6 下肢结构与D-H坐标Fig.6 Structure of lower limb and D-H coordinate
假设传感器载体坐标系Osjxsjysjzsj(j=1,2,3)相对于导航坐标系n的旋转矩阵为
(1)



(2)
式中
(3)
通过式(1)(2)相等,求解θ2=αs2-θ1.

(4)
式中
(5)
通过式(1)和式(4)相等求解θ3=αs3-θ1-θ2.
根据以上求解过程,当MiniAHRS采集的角度αs1、αs2、αs3已知,便可以求得关节变量θ1、θ2、θ3的值.
当关节变量已知,如图7所示,θlh、θlk、θla表示左腿的髋、膝及踝关节角度,θrh、θrk、θra表示右腿的髋、膝及踝关节角度,以右腿为例,关节角度与关节变量的关系表示为
(6)
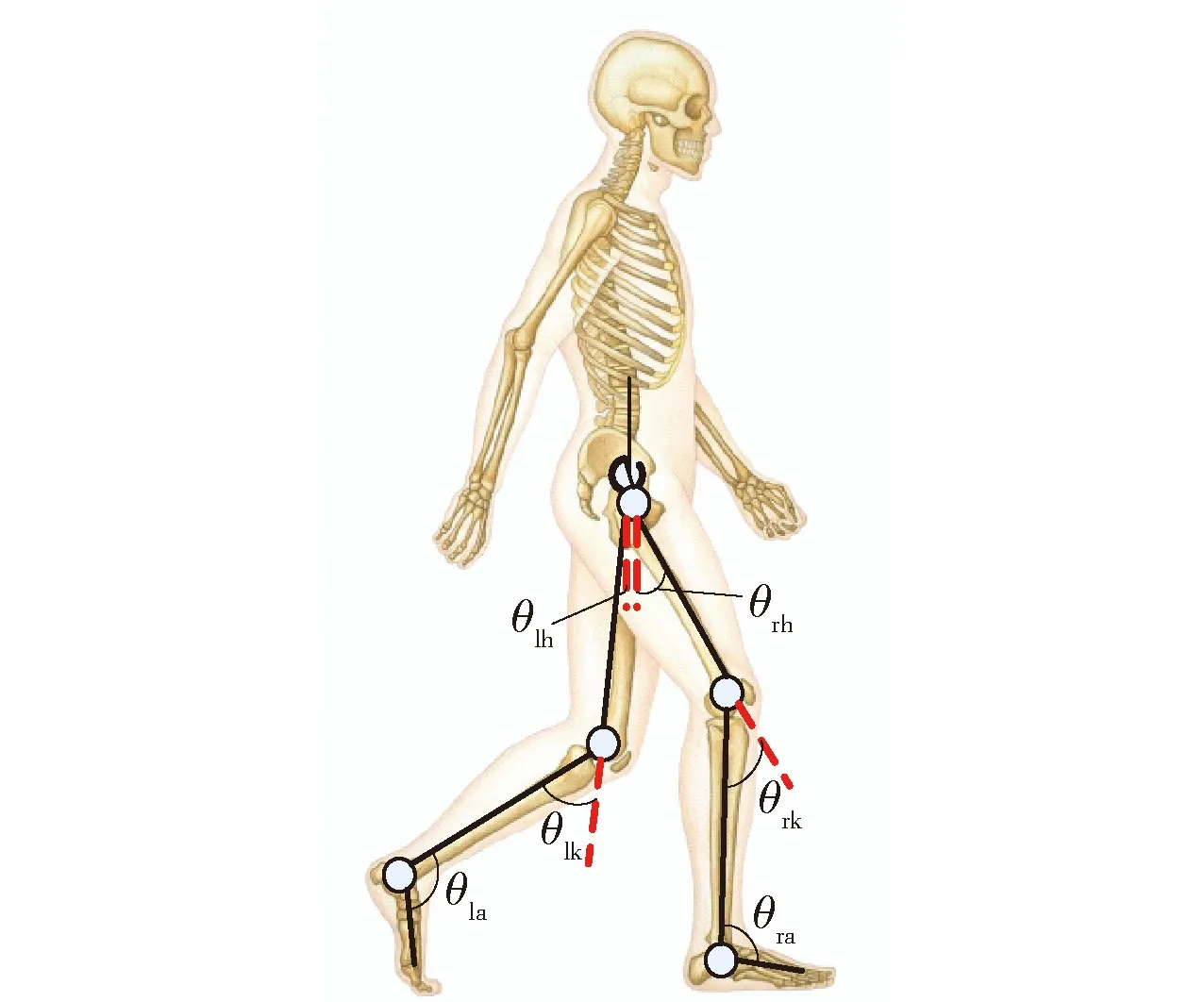
图7 关节角度示意Fig.7 Angle for each joint
3.2 步态活动识别
当助力机器人对人体进行助力时,为达到良好的助力效果,对人体的步态活动分类是有必要的,机器人控制系统通过识别出人体当前所进行的运动形式,了解到人体的运动意图,然后对助力的形式和力的大小进行调整以满足当前人体对力的需求.
3.2.1 特征属性提取
如图8所示,步态周期分割与特征属性提取都是设计分类器的基础,利用压力传感器的数值对步态进行分割,由于下肢的活动通常都是循环往复的,因此只需分割出一个步态周期内的关节角度值.

图8 决策树分类器设计步骤Fig.8 Design steps of decision tree classifier
对于分割后的步态信息进行特征提取决定着分类器的准确性[19].通常主要应用于特征提取的分析有时域分析和频域分析,另外基于人体步态活动的特征比如角度特征分析也常用于步态识别的特征提取[20].本文主要利用时域分析和角度特征分析相结合的方法对一个周期内的步态信息进行特征提取.在信号时域特征中主要利用数据的均方根值和最大值,具体地,膝关节角度的均方根值和最大值分别用Krms、Kmax表示,Krms由式(7)求得,Krms在识别上下楼梯活动的过程中具有较高的准确率,而当人体进行蹲起活动时,Kmax与其他活动相比具有明显区别,因此Kmax作为识别蹲起活动的关键特征.
(7)
式中n代表一个步态周期内有n个采样的点.
另外在识别其他活动的过程中,本文利用人体的关节角度特征作为特征属性,具体地,假设人体在上楼梯、下楼梯的活动中,当右腿刚进入支撑期时的膝关节角度表示为Ksup,如图9(a)(b)所示,上楼梯时10°

图9 不同步态活动下角度特征Fig.9 Angle characteristics under different gait activities
经过时域分析和角度特征分析提取的特征属性表示为Xm(m=1,2,3,4),分别代表属性Kmax、Krms、Ksup以及Asup.
3.2.2 分类器设计
本文基于决策树分类方法设计的分类器共有6种分类类别,用Pi(i=1,2,…,6)表示的步态活动分别为平地行走、上楼梯、下楼梯、上坡、下坡、原地蹲起,这6种步态活动包含了日常生活中基本的步态活动.假设通过训练分类器得到一组带有类别标记的训练元组集合S,利用ID3算法计算信息增益设计决策树.首先根据式(8)计算正确分类期望的信息,再依据式(9)(10)分别计算属性Xm的信息熵和信息增益[21].
(8)
(9)
Gain(Xm)=I(S1,S2,…,S6)-E(Xm)
(10)
式中:Si(i=1,2,…,6)代表训练元组集合S中各类别的元组数量;v代表属性Xm不同属性值的数量,S1j~S6j代表在第j个属性值下训练元组集合S中各类的元组数量.
在决策树中以最高的Gain(Xm)作为根节点的属性,并对除根节点属性之外的其他属性继续用式(8)~(10)计算信息增益,以拥有最高信息增益值的属性作为下一个节点,直到决策树设计完成.
4 系统性能评价
4.1 系统稳定性及可靠性验证
为了验证下肢柔性助力机器人运动学信息采集系统的稳定性和可靠性,本文以Vicon系统采集的数据作为参考,Vicon系统是由摄像机捕捉反光点在三维空间的坐标值,通过建立人体模型,全面地反映人体的运动学信息,具有较高的数据精度.
受试人员为一名身体健康的男性,无下肢肌肉、骨骼疾患,身高171 cm,年龄25岁,体质量70 kg,实验在6种步态活动下共进行60组,每种步态活动下进行10组,每组完成后休息1~2 min. 实验前,受试人员需着紧身上衣和下衣,穿戴下肢柔性助力机器人后依据Vicon系统标志点的粘贴要求,在人体的不同位置处共粘贴标志点16个,如图10所示.
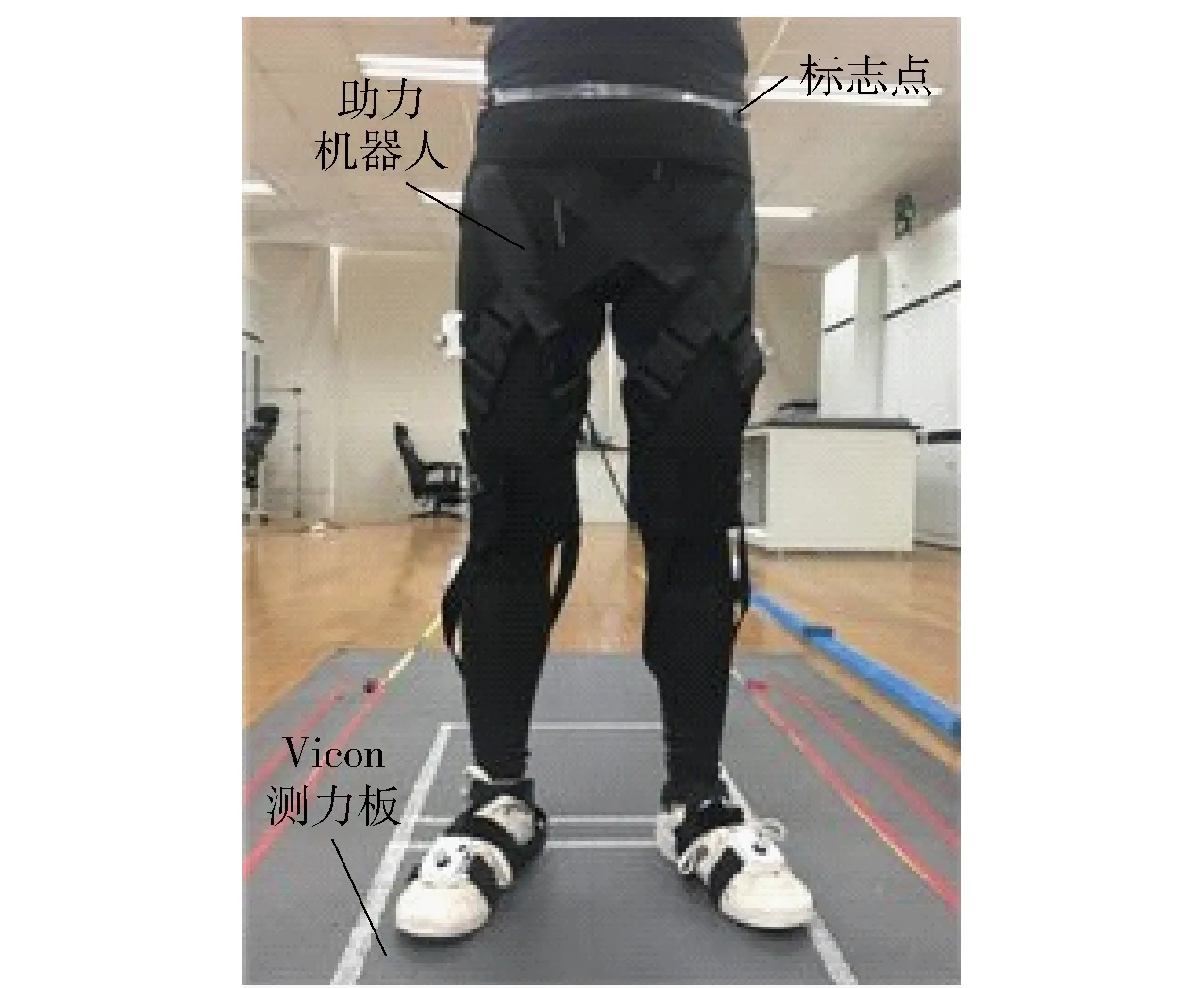
图10 Vicon系统传感器配置Fig.10 Configuration of sensors in Vicon system
如图11所示,受试者在平地完成蹲起和行走活动. 在楼梯模型和斜坡模型上完成上、下楼梯及上、下斜坡活动,如图12、13所示.

图11 平地蹲起和行走活动实验Fig.11 Snapshot of squatting and walking on flat ground activity experiment

图12 上下楼梯活动实验Fig.12 Snapshot of up and down stairs activity experiment

图13 上下斜坡活动实验Fig.13 Snapshot of up and down slope activity experiment
图14~19为以右腿为例的6种步态活动下实验数据与Vicon数据的对比结果图. 可知,在6种步态活动下运动学采集系统的数据与Vicon系统采集的数据具有很高的相似度,角度变化趋势保持一致,平均误差小于5°,结果表明,运动学采集系统具有较高的实时性和准确性,能够为下肢助力机器人提供稳定的控制信息.

图14 蹲起活动的实验数据与Vicon 数据的对比结果Fig.14 Comparison results of experimental data and Vicon data under squat activity

图15 平地活动的实验数据与Vicon数据的对比结果Fig.15 Comparison results of experimental data and Vicon data under walking on flat ground

图16 上楼梯活动的实验数据与Vicon数据的对比结果Fig.16 Comparison results of experimental data and Vicon data under walking up the stairs
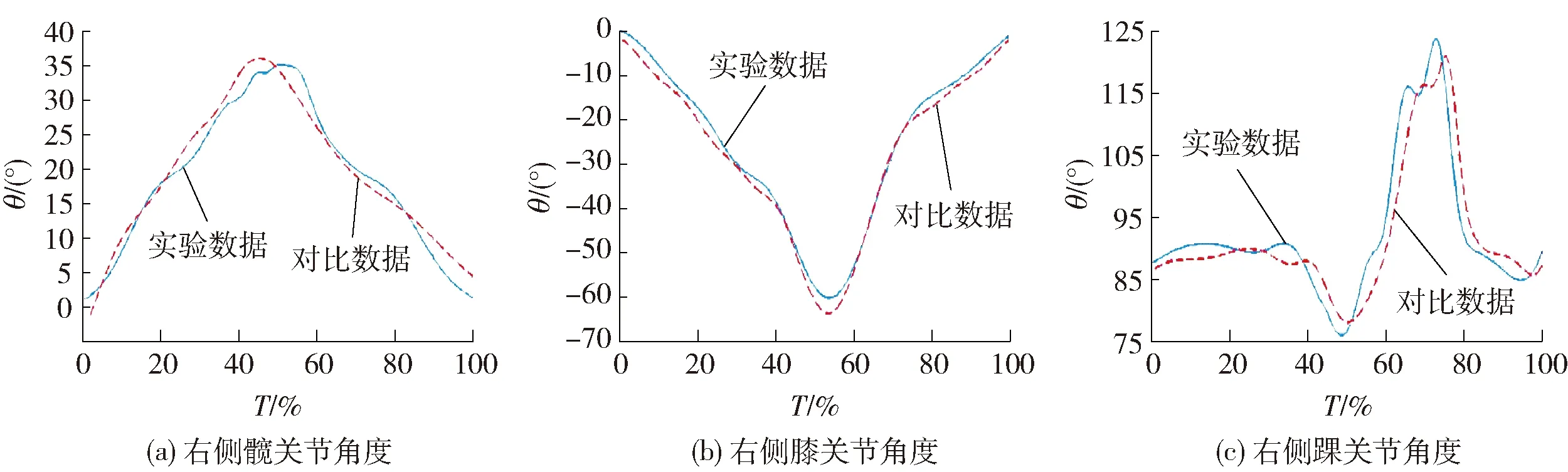
图17 下楼梯活动的实验数据与Vicon数据的对比结果Fig.17 Comparison results of experimental data and Vicon data under walking down the stairs
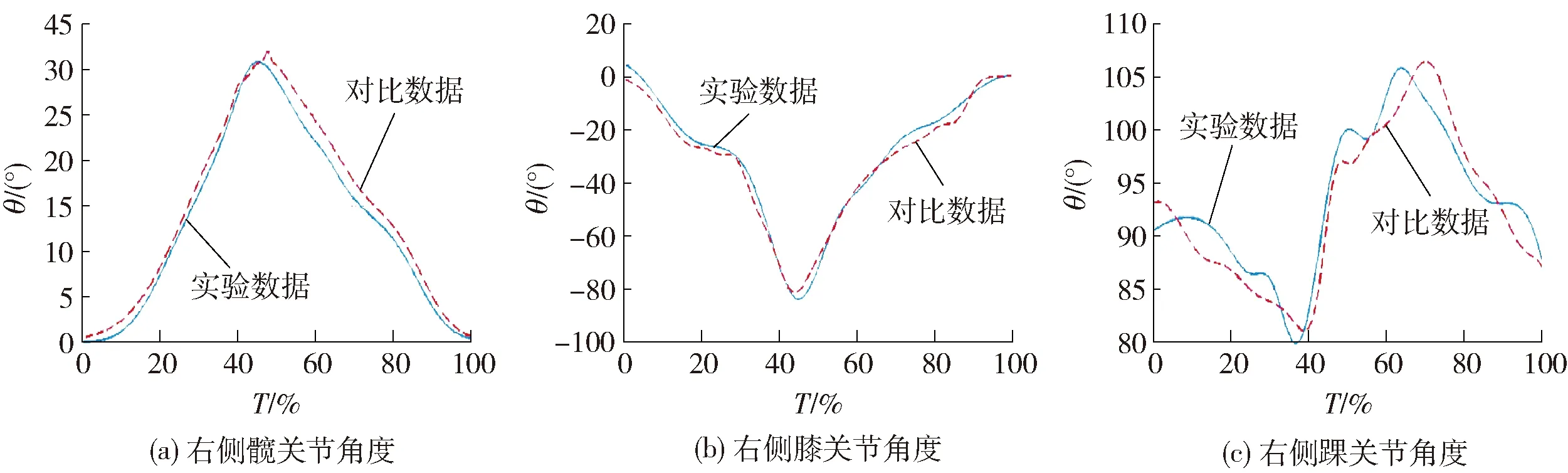
图18 上坡活动的实验数据与Vicon数据的对比结果Fig.18 Comparison results of experimental data and Vicon data under walking up the slope
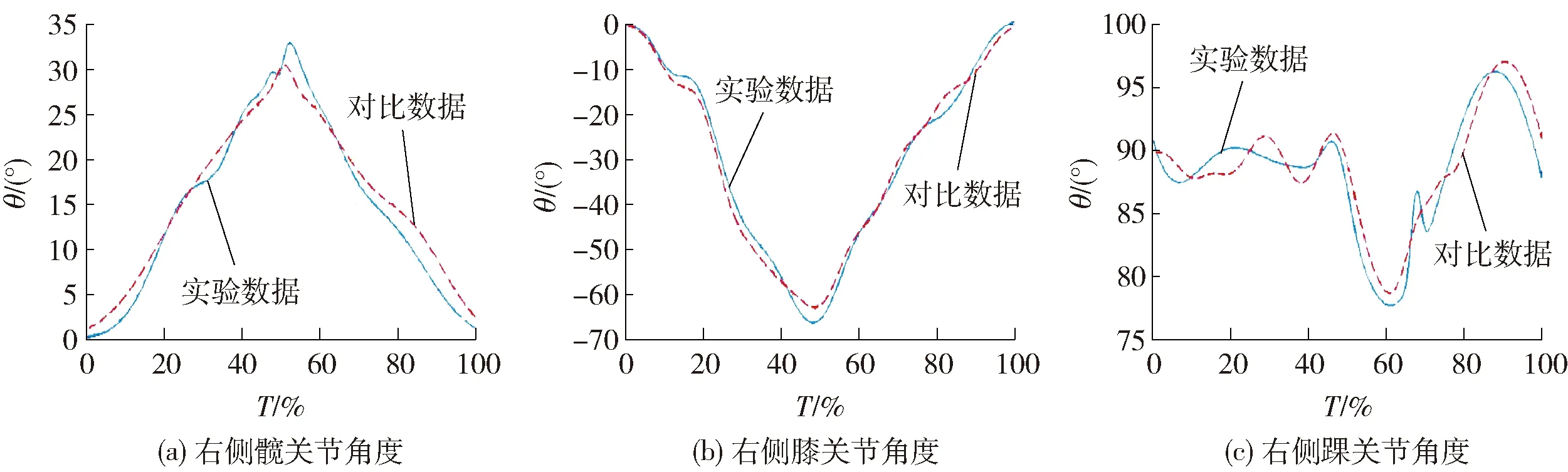
图19 下坡活动的实验数据与Vicon数据的对比结果Fig.19 Comparison results of experimental data and Vicon data under walking down the slope
4.2 步态识别准确性验证
为验证步态识别的准确性,以900例数据(每种步态活动150例)对分类器进行训练和验证步态识别的正确率,其中450例用来训练分类器,获得决策树分类器的结构如图20所示,另外450例用来测试分类器的正确率,结果如表1所示.

图20 决策树结构Fig.20 Decision tree structure
由表1步态活动识别分类结果可知,该决策树分类器在步态活动P2、P3、P6(上楼梯、下楼梯、原地蹲起)的识别中正确率能够达到90%左右,在P1、P4、P5(平地行走、上坡、下坡)中正确率达到85% 左右.

表1 步态活动识别分类结果
5 结论
1) 考虑下肢柔性助力机器人对无线传输、穿戴方便以及步态识别等特殊要求,开发了一种具有体积小、功耗低、无线传输、多通道、稳定性高及可靠性高等优点的运动学信息采集系统.
2) 在不同的步态活动下,以Vicon采集系统作为参考,分析了下肢柔性助力机器人运动学信息采集系统的数据采集精度,验证了系统的稳定性和可靠性.
3) 基于决策树分类器对不同的步态活动进行识别分类,表1为步态识别结果,结果表明该分类器具有可行性.
