加速踏板防误踩控制方法的研究与应用
2023-03-15吴洪亭谢广强岳才进
肖 亮, 吴洪亭, 谢广强, 岳才进
(中通客车股份有限公司, 山东 聊城 252000)
近年来,交通事故发生的频率不断增加,特别是在紧急制动时,经常发生误将加速踏板当刹车踩的情况。目前,纯电动车辆的整车控制器只能被动地接收驾驶意图,不能主动筛选加速踏板操作的有效性,不能判断加速踏板是否处于误操作状态[1-4]。为解决此问题,本文介绍一种纯电动客车加速踏板防误踩的控制方法及应用效果。
1 方法介绍
本文提出的加速踏板防误踩的控制方法,主要由加速踏板、整车控制器、仪表等系统配合实现。加速踏板是为整车控制器提供模拟量电压输入信号。整车控制器一是对读取的加速踏板输入的模拟输入电压信号进行处理,把模拟量电压信号转化为加速踏板开度,同时在CAN网络上发出动力扭矩信息及广播加速踏板开度;二是对加速踏板开度的变化率进行甄别,判断加速踏板信号是否有效,并将加速踏板的有效性状态发至整车CAN网络。仪表是读取整车控制器发送到CAN网络上的加速踏板开度及该踏板的有效性状态,并将踏板开度及踏板信息的有效性状态以图像及声光报警的形式展现出来。整车控制器、仪表、加速踏板相互通信,实时判断整车状态。
1) 当车辆正常启动处于上高压状态时,驾驶员正常操作加速踏板,加速踏板开度变化相对柔和,整车控制器按照当前加速踏板开度,根据电机特性及内部控制逻辑请求电机控制器输出相应的扭矩。
2) 当车辆前方出现紧急情况时,制动踏板会紧急踩下,如果此时误踩到加速踏板上,加速踏板的变化率会超出正常操作范围[5-6]。
本文把加速踏板变化率过快作为误踩加速踏板场景的映射,设定相应阈值进行整车的加速踏板防误踩逻辑处理。
2 控制逻辑设计
2.1 具体控制原理
由多人、多次进行实车试验及数据采集。通过数据分析,当驾驶员正常踩加速踏板时,踏板开度40 ms内的变化值在10%~27%之间;在快速踩下加速踏板时,踏板开度40 ms内的变化值在40%~56%之间。即在正常操作下,40 ms内的踏板开度变化率小于30%,快速踩下踏板时,40 ms内的踏板开度变化率大于40%。因此将加速踏板开度变化率阈值设置为每40 ms变化40%。在此加速踏板变化率阈值以下的作为正常操作,以上的作为异常操作[7-9]。
纯电动客车的加速踏板自身特性为双模量输出,即踩下踏板时输出两路电压信号:一路电压为基准值,用于计算当前踏板开度;另一路电压为校验值,用于校验与用基准值计算出的踏板开度是否一致。两路输出电压均呈线性变化,且在正常情况下两路电压满足2倍关系。加速踏板电压输出特性如图1所示。两路电压信号进入整车控制器,整车控制器既可只选取基准值计算当前踏板开度,也可选取两路分别计算踏板开度,再通过内部逻辑处理,发出当前踏板开度至CAN网络。本方法选用两路电压值分别计算踏板开度,同时将第一路信号作为基准值,第二路信号设定为校验值。两路输出电压值接入整车控制器的模拟量转换模块,通过MATLAB模型分别计算完成后,整车控制器将计算值和校验值计算的结果进行比较,当基准值和校验值计算结果一致时,整车控制器将此时的踏板开度发送至整车CAN网络;如果基准值和校验值计算结果不一致,此时的加速踏板开度值发0,同时整车控制器将加速踏板状态发为异常[10]。

图1 加速踏板电压输出特性
在未踩加速踏板时,加速踏板的两路输出电压分别为0.375 V、0.75 V,此时整车控制器通过内部转换逻辑将此刻的电压值转换为对应的模拟量数据,通过MATLAB模型标定出此时对应的加速踏板开度为0。将加速踏板踩到底后,加速踏板两路输出电压分别为1.92 V、3.84 V,此时整车控制器通过内部转换逻辑将此刻的电压值转换为对应的模拟量数据,通过MATLAB模型标定加速踏板开度为100%。当前实际加速踏板开度值根据两路电压值变化,在MATLAB模型中转换成对应的模拟量,整车控制器输出的加速踏板开度在0%~100%范围内线性变化。
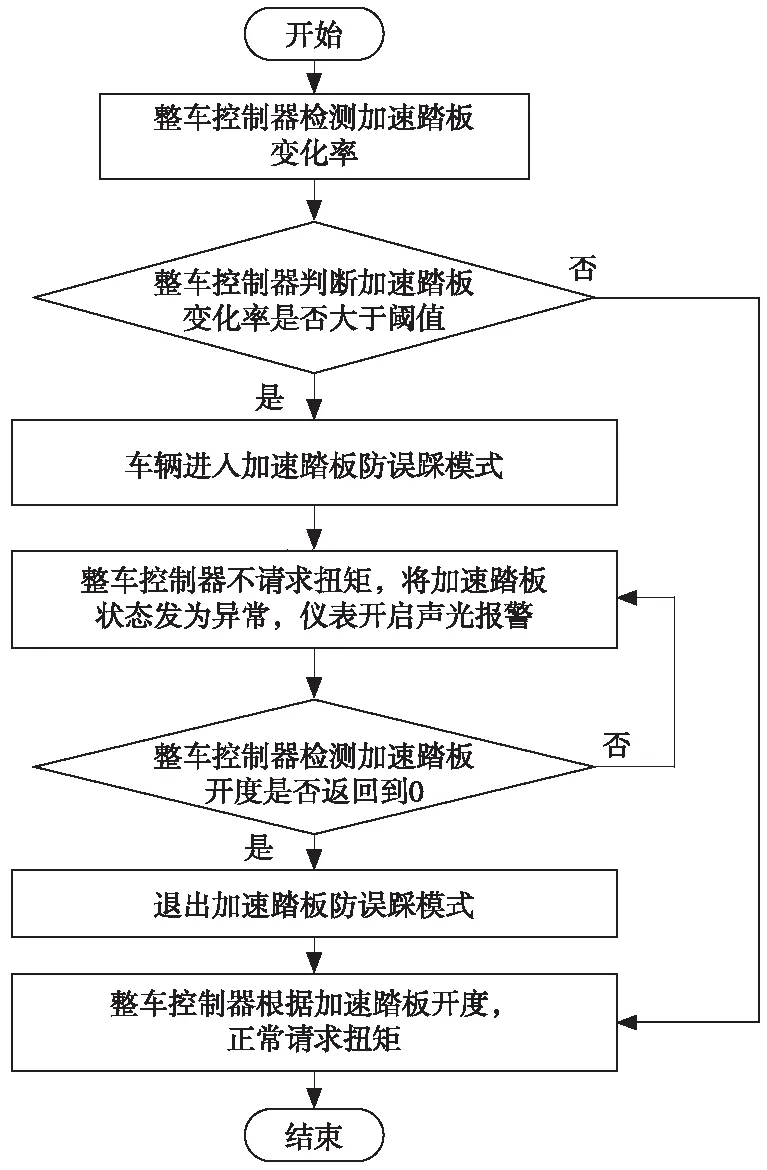
图2 加速踏板防误踩逻辑流程图
由于加速踏板的CAN报文周期为10 ms,即加速踏板在连续发送的4帧报文周期内,如电压值对应的踏板开度超过40%(即变化率超过阈值),此时整车控制器判断加速踏板为异常状态,进入加速踏板防误踩逻辑,整车控制器不再请求扭矩。当整车控制器检测到加速踏板开度回归0%后,整车控制器将加速踏板状态重新置为正常状态,退出加速踏板防误踩逻辑[8]。整车控制器将加速踏板的状态实时发送到整车CAN网络中。当仪表读取到加速踏板状态异常时,仪表主界面发出声光报警提示驾驶员处于误操作的状态中。当仪表读取到加速踏板状态正常时,仪表主界面不再显示加速踏板误踩图标及不再发出声光报警,车辆回到正常状态。整个控制逻辑如图2所示。
2.2 方法验证
根据该方法中提供的控制逻辑优化整车控制器,将加速踏板变化率阈值及判断踏板当前状态逻辑增加到MATLAB模型中;优化仪表程序,当仪表读到CAN网络中加速踏板为异常状态时,在仪表界面显示加速踏板防误踩图标,并开启声光报警程序。
将此控制逻辑分别在8 m城市客车、10 m城市客车、9 m旅行客车等多种车型上进行实车验证。在验证过程中,驾驶员分别在车辆静止、车辆正常运行过程中两种状态下,反复做出正常踩加速踏板、快速踩加速踏板两种不同操作方式,同时采集并保存实验数据。
当驾驶员正常操作加速踏板时,40 ms内的加速踏板开度变化率均小于30%,此时整车控制器正常输出请求扭矩,车辆正常运行;在快速踩下加速踏板时,40 ms内的加速踏板开度变化率均大于40%,达到了设定的阈值,此时整车控制器无请求扭矩,并将加速踏板状态发为异常,同时在人体感官上整车无动力输出,仪表界面有报警提醒,车内有蜂鸣器报警。达到了预期效果。
3 结束语
本文论述的方法利用整车CAN网络发出指令,整车及时响应、可靠性高,且只需要软件实现,成本低。通过反复对该控制方法进行验证,可以表明此控制方法能及时准确判别加速踏板状态和紧急情况下误踩操作,有效地防止由于驾驶员误踩加速踏板导致事故发生,进一步提升整车的安全性。