矿井综采工作面三机智能化控制研究
2023-03-15李梦祺武佐文
李梦祺,武佐文
(山西汾西矿业集团 正文煤业,山西 孝义 032300)
随着工业化、信息化技术不断发展,煤矿井下先进的通信技术、控制技术等不断应用,在一定程度提升了矿井综合智能化控制水平[1-2]。矿井生产过程中,综采工作面是主要的煤炭开采、运输场所,实现采面内采煤机、刮板输送机以及液压支架合理衔接、配套,是实现煤炭资源高效回采的重要保障[3]。为此,众多的学者及工程技术人员对综采工作面三机配套问题展开研究,其中宋焘等[4]基于智能感知技术构建三机智能控制系统,并对控制系统执行层、感知层、巷道集控和地面监控等进行详细阐述,该智能控制系统综合惯性导航、雷达、里程计以及先进传感器等实现智能协同控制,现场实践也取得较好效果;杨文明等[5]基于编程思维构建“三机”设备选型与智能控制系统,便于选出适合采面现场情况的成套设备,为采面三机配套选型提供一定指导。文章结合以往研究成果,根据山西某矿3302综采工作面现场情况,对三机智能化控制展开研究,以期在一定程度上提升煤炭生产效率。
1 工程概况
3302综采工作面回采的3号煤层厚度3.9 m,倾角5~10°,煤层赋存稳定,埋深390 m.3号煤层直接顶为浅灰色砂质泥岩、砂岩互层,厚度12.3~15.8 m;基本顶为石灰岩,厚度7.5~12.1 m;直接底为灰黑色炭质泥岩、泥岩,厚度3.2~7.3 m;基本底为粉砂岩,厚度3.5~6.2 m.3302综采工作面位于一单斜构造背面,采面设计走向推进2 105 m、切眼斜长298 m,主要综采设备包括:SL900采煤机、型号ZYT12000/28/63D端头支架、型号ZY12000/28/63D中间支架以及型号ZYGD12000/28/63D过渡支架,采面内铺设的刮板输送机型号为SGZ1250/300、破碎机为SZZ1550/525,回采巷道采用ZYDC5150/27/47超前支架支护。
2 三机智能化控制
3302综采工作面采煤机采用自动割煤工艺,并依据现场情况确定割煤工序、行走轨迹,采煤机、液压支架及刮板输送机根据割煤工艺智能协同控制,实现无人干预智能回采[7-8]。具体采面三机智能化协同控制示意如图1所示。

图1 采面三机智能化协同控制示意
采面内构建无线基站实现数据高效传输,通过光纤惯导模块实现采煤机定位及控制。液压支架电控系统结构包括驱动器、耦合器、控制器以及红外接收器等;姿态监控及视频系统实现关键设备监控、采面视频监控;集控中心实现采面设备控制以及信号传输。
2.1 采煤机智能化控制
将惯导系统应用到采煤机智能化控制中,系统监测数据经工业以太网传输到集控中心,经中央处理器处理、转换成综采设备可识别的控制指令,实现一键启停、推移支架以及精准推溜等功能,提升采面设备精细化管理水平。通过惯导系统、传感器(倾角、振动传感器)及电控参数确定采煤机姿态,实现记忆截割,并通过瓦斯浓度、采煤机及运输系统负载等调整采煤机牵引、截割速度,具体控制流程如图2所示。采煤机割煤时以记忆截割为主、人工干预为辅,采煤机割煤遇特殊情况时需人工干预,采用的割煤方式可明显降低采煤司机工作强度。
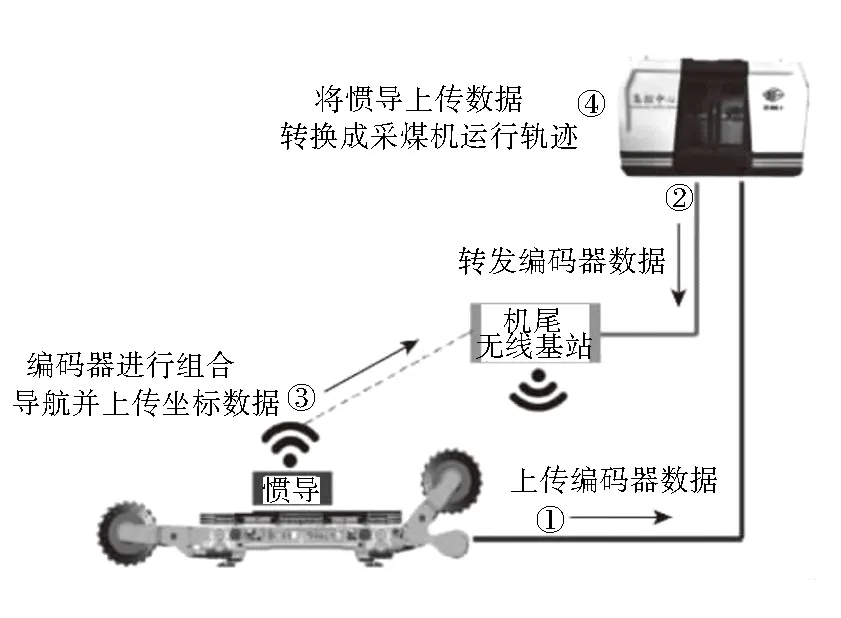
图2 采煤机智能控制示意
2.2 液压支架智能化控制
在采面液压支架上增设多种感应探头,通过探头可实现顶板压力、刮板输送机推移力以及护帮推力等监测。在液压支架上配备双速控制阀,完成自动移架后,通过双速控制阀控制推移千斤顶运动,确保移架千斤顶与刮板输送机溜槽充分接触,避免多次移架后出现推移误差过大引起的刮板输送机弯曲问题。通过红外发射及接收装置实现采煤机定位,定位数据传输至集控中心进行分析后,支架控制模块接收反馈信息,实现液压支架自动跟机、护帮、推溜、移架以及喷雾等操作。
智能控制系统依据采面地质条件变化、采面生产情况自动补压升架,实现液压支架升降、调整自动控制,期间以自动控制为主、人工干预为辅,从而提升支架智能化控制水平,减少支架工数量以及劳动强度。
2.3 刮板输送机智能化控制
刮板输送机直线度检测及智能化控制综合使用惯导与里程计融合技术、多信息融合技术。惯导与里程计融合技术主要实现刮板输送机直线度检测,而多信息融合技术实现液压支架跟机运行及自动调直。
1) 惯导与里程计融合技术。具体惯导与里程计融合技术架构如图3所示,主要包括惯导测量组件、集控中心、任务计算机以及里程计等。惯性导航系统、里程计均置于采煤机上,实现采煤机运行姿态(包括航向角、横滚角以及仰俯角等)实时监测,并通过里程计实现采煤机位置精准定位,通过获取到的采煤机运行轨迹掌握刮板输送机直线度,为后续调直提供支持;同时采用的惯导系统由于能反映采煤机姿态,也可为采煤机采高调节、液压支架跟机运行等提供支撑。
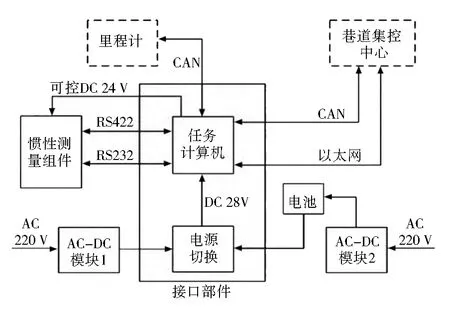
图3 惯导与里程计融合技术架构
2) 多信息融合技术。跟机运行及调直控制是实现智能化生产的关键之一,基于多信息融合的自动跟机与调直控制原理如图4所示。将惯导系统、里程计、液压支架传感器参数以及雷达传感器参数等传输至巷道集控中心进行融合分析;依据刮板输送机直线度检测结果、液压支架行程参数等得到采煤机割煤后液压支架推移量偏差,具体偏差量计算原理如图5所示。
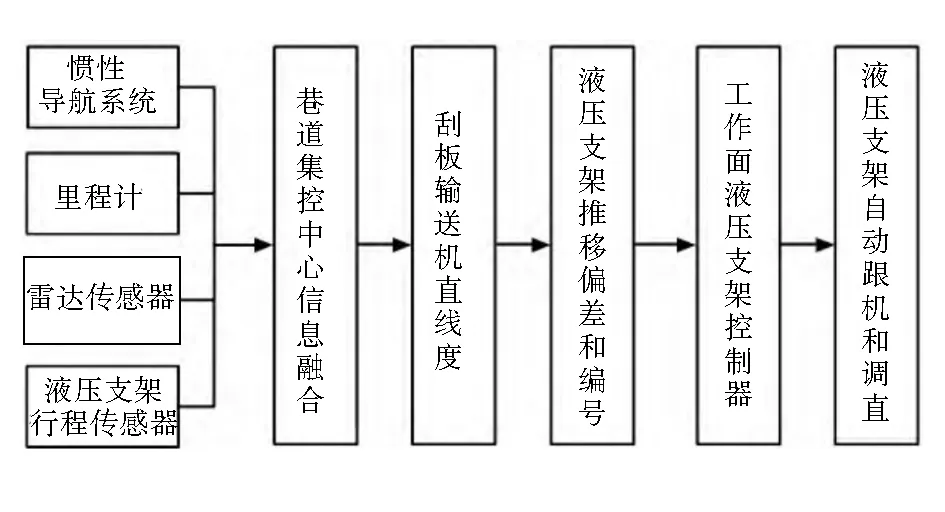
图4 自动跟机与调直控制原理
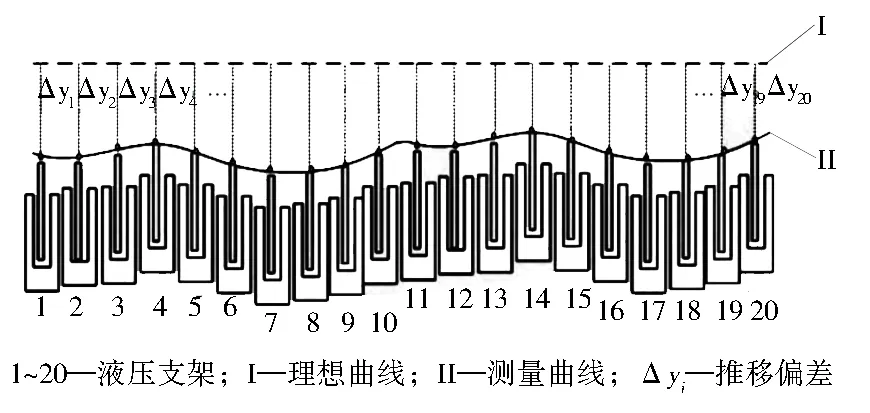
图5 偏差量计算原理
巷道集控中心依据采煤机截割深度、液压支架推移量偏差参数等,向液压支架控制器发送推移量控制指令,从而实现调直控制。
2.4 三机智能化控制
将采煤机、刮板输送机以及液压支架智能控制系统整合,实现三机智能化控制。同时控制数据均可通过手机移动端APP、Web端等查看,便于工作人员快速掌握井下设备运行情况。
三机智能化可实现煤流负载均衡控制,采面负载均衡控制是采煤机、刮板输送机以及带式输送机等联动控制,系统具备煤流负荷平衡功能,通过分析开采设备、运输设备间均衡关系构建负荷平衡控制模型,并依托该模型实现刮板输送机、采煤机间负载平衡,实现煤炭高效回采。具体采面负载均衡控制如图6所示。

图6 煤流负载均衡控制示意
主控制中心根据自身数据以及负载数据进行综合分析,实现下述功能:
1) 实现刮板输送机智能化控制、均衡生产,依据监测获取得到的采煤机牵引电机、截割电机温度、电流以及刮板输送机电机温度、电流等参数,结合泵站参数分析煤流负载,并依据负载变化调整采煤机牵引速度或者刮板输送机链速等;
2) 刮板输送机断链、断电等故障时实现自动停止割煤;
3) 实现采煤机、破碎机以及刮板输送机等设备联动控制。
3 现场应用效果分析
1) 在3302综采工作面采用三机智能化控制系统,该系统现场应用平稳,在协调性、有序性以及整体性等方面表现出显著优势。3302综采工作面当班工作生产人员有26人、整体配套(包括运输、检修等)人员130人。采用三机智能化控制系统后,当班生产人员减少至12人、整体配套(包括运输、检修等)人员减少至55人,减人增效成果显著。
2) 3302综采工作面三机实现智能化控制,采煤机推进速度由3.6 m/d提升至4.8 m/d,回采效率提升约33%.同时通过各监控平台可实现三机运行参数实时监测,设备故障发生率明显降低、减少了故障停采时间,单班设备开机时间在7.5 h以上、开机率超过93%.
4 结 语
1) 构建智能化矿井是实现煤炭高效开采、减少井下工作人员数量的主要途径之一,而综采工作面是矿井主要生产场所,实现综采工作面三机智能化控制是智能化矿井建设的主要内容。由于传统的综采工作面各设备受控制方式、通信方式等因素制约,无法实现集中智能化控制,为此文中构建的三机智能化控制系统采用无线基站、光纤通信等方式实现信息交互,通过采用先进的惯性导航系统、传感器检测技术等实现三机设备智能化控制。
2) 对三机智能化控制系统关键技术进行分析探讨,并对现场应用效果进行分析。三机智能化控制系统在3302综采工作面应用实践表明,该智能化控制系统可在一定程度提升煤炭开采效率、减少井下工作人员数量,在减少增效以及提升矿井生产效益方面表现出明显优势。
