船载高频地波雷达一阶海杂波仿真模型研究
2023-03-11韩文强李庆忠
韩文强,李庆忠
(中国海洋大学工程学院,山东 青岛 266100)
1 引言
高频地波雷达(High Frequency Surface Wave Radar,HFSWR)根据雷达平台的安装方式可以分为岸基HFSWR和船载HFSWR,岸基HFSWR具备实时、探测距离远、覆盖面积广及全天候等优点,但是岸基HFSWR的监测仅限于沿海海域[1]。船载HFSWR除了以上优点之外,还具备很强的灵活机动性,进一步扩大了雷达的探测范围,提高了监测的稳定性,广泛用于监测开放海域的舰船目标。
对于船载HFSWR,由于海浪与平台运动的相互的作用,海洋回波特性相对于岸基HFSWR更加复杂,前向运动会引起回波多普勒谱中的一阶海杂波展宽,导致展宽域中的目标被掩盖[2],这对位于展宽域中的低速小目标检测非常不利。
长期以来,如何抑制海杂波都是学者研究的重点,但是由于实测数据不足以及影响因素未知性较大,导致海杂波抑制算法的研究难以有很好的实验数据支撑。因此,亟需进行海杂波模型的仿真研究,为后期海杂波抑制与目标检测算法研究提供依据,并能有效评估雷达在杂波环境中的工作性能。
目前,常见的海杂波建模方法主要有以下三种:基于统计模型的海杂波建模、基于雷达截面散射机理的海杂波模型和基于空时分析的海杂波建模。
基于统计模型的海杂波建模方法描述的是海杂波在时域幅度上的变化,其核心思想是将海杂波看成是来自雷达照射区域分辨单元内多个散射体后向散射矢量的叠加。典型的分布模型包括:Weibull分布、K分布、对数-正态分布、Pareto分布和Tsallis分布等[3-5],这些统计分布模型只能适合某些特定的海洋环境,具有较大的局限性[6]。
基于雷达截面散射机理的海杂波模型就是利用海面电磁散射机理,从而建立合适的电磁波与散射介质之间的相互作用模型,最后通过建立雷达散射截面方程的来实现海杂波的建模。如Khoury等人[7]从雷达回波信号的角度对浮动平台下的雷达截面积以及海杂波多普勒谱进行了分析,同时研究了风速和风向对横荡和纵荡运动的影响;马娇[8]由一阶电场方程推导出了海杂波的一阶雷达截面方程,并得到了回波信号的表达式;Sun等人[9]推导了具有横荡运动和前向运动的船载HFSWR的反射截面模型;另外贺超[10]和周企豪[11]也都在自己的研究中用到了基于雷达截面散射机理的海杂波模型。
实际的雷达回波数据一般是三维数据,即距离、多普勒维和方位维,因此空时建模也是海杂波建模的常见方式。如Sun等人[2][9][12]在实验中发现船载平台的运动会导致一阶海杂波谱展宽,除此之外还提出了本征谱结构和时空分布模型。Cai等人[13]分析了纵荡运动或横荡运动对船载HFSWR一阶海杂波时空分布的影响。Yao等人[14]分别对六自由度和前向运动对一阶海杂波时空分布的影响进行了分析,发现多自由度运动产生的附加峰也会被展宽的一阶海杂波覆盖。空时分析的建模可以很好的建立全维度的海杂波仿真模型,针对不同的平台使用不同的波段,具有很好的推广性。
但目前基于空时分析的海杂波建模方法[12-14]都只考虑了船载平台前向运动会引起一阶海杂波的展宽问题,并没有考虑相参积累时间内舰船前向运动会造成不同距离元上的一阶海杂波分布特性的不均匀性,故构建的海杂波仿真数据和实测的海杂波数据存在较大的差异,不利于后续海杂波有效抑制方法的研究。
为克服目前以上基于空时分析的海杂波建模方法存在的问题,本文对船载HFSWR一阶海杂波空时分布特性进行了研究,理论分析了船载平台前向运动时回波方位角改变对时空分布模型的影响,在考虑前向运动和舰船平台三自由度摆动因素下,建立了一阶海杂波时空分布的改进模型,再通过引入海杂波在传播过程中距离衰减模型,便可得到三维的海杂波仿真数据。最后,根据改进的空时分布模型还建立了基于SwerlingIV的舰船目标模型。仿真验证了提出改进模型的有效性和可行性。
2 船载HFSWR海杂波特性分析及建模
2.1 一阶海杂波空时分布模型
对于岸基HFSWR,根据Bragg散射原理,当海浪波长为雷达波长一半时,会产生关于多普勒频率对称的正负一阶Bragg峰[2][9][12-14]。基于单基地雷达多普勒公式,一阶Bragg频率公式如下

(1)
其中g=9.8m/s2为重力加速度;λ为雷达波长,单位为m;fc=c/λ为雷达载波频率,单位为MHz,c为光速。
而对于船载HFSWR,为了准确建立船载海杂波的空时分布模型,本文首先对船载平台只有前向运动条件下的海杂波几何模型进行分析。图1显示的是船载HFSWR某个距离元r上一个海杂波子块P1的几何模型。假设船载平台前向运动速度为Vp,对于杂波子块P1,传统的海杂波空时分布模型为
fd=fdpcosφ0±fB
(2)
其中fdp=2Vp/λ为雷达平台运动引起的多普勒频率。因此传统模型中当只考虑平台前向运动时,平台的前向运动会给不同方向的海杂波引入额外的多普勒频率,导致一阶海杂波多普勒域展宽[15-17]。但是该模型中杂波块P1相对于观测点A的入射方向与平台速度方向的夹角φ0在整个相参积累周期内是固定不变的,这就是传统模型的存在的严重缺陷。因为,一个相参积累周期通常为数分钟,在这段测量时间内,船载移动平台会产生一定的平移位移量。下面具体分析在一个相参积累周期内,夹角φ0的变化规律。
如图1所示,在某个相参积累时间t内,船载平台从观测点A(某个阵元)以前向速度Vp运动到观测点B,则观测点A与B之间的距离为Vpt。当相参积累开始时,杂波块P1相对于观测点A的入射方向与平台速度方向的夹角为φ0(0)=φ0,而在相参积累时间t时,船载平台观测移动到了观测点B,此时杂波块P1入射方向与平台速度方向夹角变为φ0(t)。可见,在一个相参积累周期内,对同一海杂波子块,相对于某一阵元的观测角是变化的。根据三角函数定理,由图1可知

(3)
化简后得
φ0(t)=arctan(cot(φ0)+(Vptsec(φ0))/r)
(4)
因此,在一个相参积累周期内,杂波子块与观测阵元的入射夹角是一个随着时间变化的函数。由此推得船载平台只有前向运动条件下,改进的海杂波空时分布模型为

图1 船载HFSWR海杂波几何模型
fd=fdpcosφ0(t)±fB
=fdpcos[arctan(cot(φ0)+(Vptsec(φ0))/r)]±fB
(5)
此改进模型与传统模型(2)相比,主要具有两个不同点:一是在同一距离元内,海杂波接收信号的角度会随着相参积累时间的变化而变化;二是对于不同距离元,由图1可知,不同距离元但是回波入射角相同的杂波块P1与P2,在一个相参积累周期内,两者的回波入射角度随时间变化的函数是不一致的。这就说明在一个相参积累周期内,随着船载平台的运动,不同距离元的海杂波回波信号在距离尺度上的分布特性是不一致的,这从理论上解释了为什么实测海杂波数据在不同距离元上并不服从独立同分布的假设。
在以上一阶海杂波时空分分析的基础上,下面建立舰船复杂运动模式下一阶海杂波时空分布模型。一般情况下,船载平台除了前向运动外,还包括海浪或风浪引起的六自由度运动,具体如图2所示。包括沿三坐标轴方向的三自由度平动(纵荡、横荡、垂荡);以及绕三坐标轴方向的三自由度摆动(横摇、纵摇、艏摇)。实测实验表明[16],三自由度平动对一阶海杂波的空时分布影响很小,可忽略不计,故本文只考虑三自由度摆动对船载平台的影响,即只考虑侧倾运动φ(t)、俯仰运动ψ(t)、以及偏航运动φ(t)(如图2所示)在海杂波子块回波方向引起的附加多普勒频移[9][16][17]。
在三自由度摆动影响下,船载雷达平台水平面上的速度向量组成如图3所示。其中d为阵元间距,接收阵元数目为N,不考虑雷达偏航时候,海杂波回波子块至雷达阵元的入射方向与平台前向运动速度方的夹角为φ0(t)。图中Vs为雷达平台某阵元与海杂波子块对应的径向速度,Vroll是由侧倾引起的速度,Vroll=h0d[φ(t)]/dt,h0是天线阵元的高度,Vpcos[ψ(t)]和Vrollcos[φ(t)]分别是Vp和Vroll在水平面的x轴和y轴上的投影。

图2 船载平台六自由度示意图
由于一阶海杂波时空分布模型的构成包括:除了一阶Bragg频移fB外,还需要考虑船载平台在以上三个摆动和一个前向运动造成的在接收方向的附加多普勒频移。因此在考虑φ0(t)的变化和以上运动影响下,推得的舰船复杂运动模式下一阶海杂波时空分布模型如下
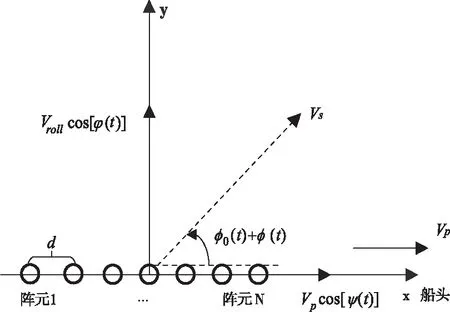
图3 三自由度摆动影响下水平面速度向量
fd=fdp(t,φ0(t))±fB
(6)
fdp(t,φ0(t))=2Vs/λ
(7)
Vs=Vpcos[ψ(t)]cos[φ0(t)+φ(t)]+
Vrollcos[φ(t)]sin[φ0(t)+φ(t)]
(8)
因为舰船在波浪扰动的作用下,3自由度摆动具有一定的周期形式,故本文以正弦变化的周期振荡函数来描述三个摆动运动

(9)
其中Aψ为俯仰角幅度,Aφ为偏航角幅度,Aφ为侧倾角幅度,单位均为rad;Tψ为俯仰周期,Tφ为偏航周期,Tφ为俯仰周期,单位均为s。
值得注意的是,式(5)和(6)中的φ0(t)是随时间变化的,而目前传统模型中该夹角是保持固定不变的,φ0(t)的具体计算见式(4)。该模型与传统模型相比,同样具有两个不同的特点:一是在同一距离元内,海杂波接收信号的波达角会随着相参积累时间的变化而变化;二是不同距离元的海杂波回波信号在距离尺度上的分布特性是不一致的。
2.2 海杂波回波信号模型
船载HFSWR的测量范围通常在150km左右,理论上所有的距离单元均有海杂波分布,且对于广阔的海平面而言,所有方向都可能存在海浪回波,故所有角度单元上同样都存在海杂波。可以把每个角度-多普勒-距离单元中的海杂波当成一个点目标,故该距离元的海杂波回波信号可以看作该距离元对应半圆环内不同方向独立杂波块回波信号的累加[16][17],各距离元半圆环的构成以及杂波子块的示意如图4所示。
下面建立船载HFSWR在前向运动和三自由度摆动下的海杂波回波信号模型。在考虑船载平台前向运动对一阶海杂波回波入射角影响的情况下,对于某个阵元,距离元r内波达角为φ0(t)的杂波块,其回波信号的时域模型为

图4 各距离元海杂波构成示意图
st(t)=At(ej2πfd1t+ej2πfd2t)
(10)
其中At为幅值,服从瑞利分布;fd1与fd2分别为海浪靠近雷达和远离雷达的多普勒频率,本文由前面推导的式(3)-(6)计算,其中
(11)
其中回波入射角φ0(t)是随着时间变化的,但是半圆环内所有角度对应的杂波子块回波信号的累加就是相对某个雷达阵元该距离元r的总的回波信号,如下式
(12)
其中φ0∈[0°,180°]。
对于所有阵元,一个距离元接收到的所有数据叫一个快拍数据,根据空间导向矢量即可得出。在三自由度摆动下,由所有阵元之间的相位差组成的空间导向矢量为:
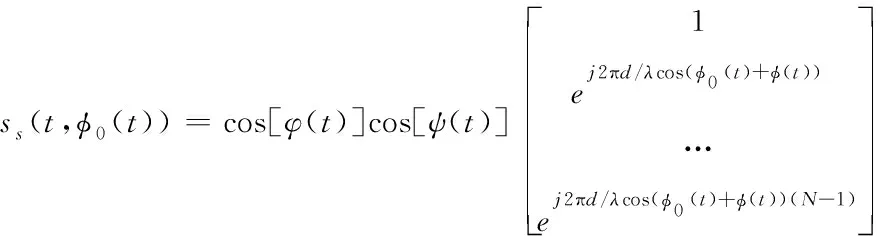
(13)
式中N是阵元数目。由此得到的一个快拍数据模型如式(14)所示

(14)
虽然式(14)在形式上和文献[14-16]类似,但本文模型中,φ0(t)是随时间变化的,而文献[14-16]的模型中该夹角是保持固定不变的,故后续仿真有较大区别。
由于高频地波雷达的发射及接收信号采用线性调频连续波(Frequency Modulated Continuous Wave,FMCW)的形式[17],在一个脉冲积累时间内,发射M个脉冲,脉冲重复周期为Tr,不同时刻时间变化规律为t∈[0,Tr,2Tr,…,(M-1)Tr],因此对于某个距离元,所有阵元在整个脉冲积累过程中所接收到的信号数据为一个N×M维的二维快拍数据X,如式(15)所示
X=[x(0),x(Tr),…,x((M-1)Tr)]
(15)

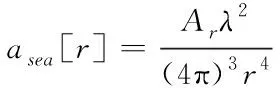
(16)
其中Ar为衰减系数,λ为雷达发射波波长。
通过式(15)推导的某一距离元一阶海杂波的二维数据,以及式(16)距离衰减向量,可由下式构建N×M×rmax的三维一阶海杂波数据
Dsea(r)=asea[r](X+Noise)
(17)
其中Dsea为N×M×rmax的三维数据;rmax为雷达探测最远距离;r表示距离索引;Noise表示高斯白噪声。值得注意的是,因为式(17)是在式(5)和(8)的基础上推导而来,由于不同距离元各杂波子块的回波入射角度随时间变化的规律是不一致的,所以根据式(17)产生的海杂波三维数据,在一个相参积累周期内,不同距离元的海杂波回波信号在距离尺度上的分布特性是不一致的,这是本文海杂波回波信号的特点之一。
2.3 目标回波模型
在实际雷达接收的回波信号中,除了包含一阶海杂波外,还包含舰船目标等。仿真目标一般作匀速直线运动,在低海态下可以不考虑目标三自由度摆动对目标速度的影响,即仿真目标可以看出一个点目标。仿真目标的速度向量如图5所示,图中Vt是所加入船目标的速度,Vtr是船目标的径向速度,φ0t(t)为某一时刻目标回波入射方向与船载平台前向运动速度方向夹角。对于船载HFSWR,仿真目标和一阶海杂波子块的模型类似,可以看作是海平面上独立的一块,随着船载平台的运动,φ0t(t)也是一个随时间变化的函数,而非像传统目标模型[10][16]一样,φ0t(t)固定不变。
在一个相参积累周期内的t时刻,所有阵元接收到的目标回波信号时域数据模型xt(t)为
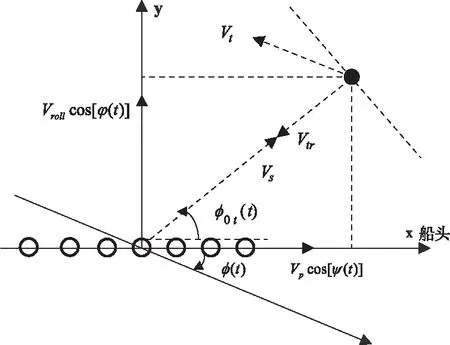
图5 仿真目标速度向量
xt(t)=sst(t,φ0t(t))ej2πf0tt
(18)
其中f0t是目标相对某阵元的径向多普勒频移,见式(19),式中的fdp为平台前向运动引起的额外的多普勒频移,公式中的第二部分是目标径向速度引起的多普勒频移。
f0t=fdp(φ0t(t),t)+2Vtr/λ
(19)
ss(t,φ0t(t))为空间导向矢量
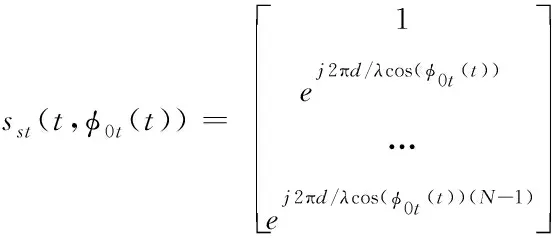
(20)
因此在一个相参积累周期内,所有阵元所接收到的仿真目标空时数据Xt如下
Xt=[xt(0),xt(Tr),…,xt((M-1)Tr)]
(21)
由于雷达探测目标具有各种各样的形状与散射特征,在一个雷达分辨单元内,目标回波散射通常由多个散射单元构成,难以用一个精简的模型加以限定,因此对于目标回波散射回波幅值强度一般采用统计模型[10][16]。由于船载平台运动,目标回波入射角也是一个随着时间变化的函数,因此本文选用最为经典的SwerlingIV幅度起伏模型,该模型比较适合大的反射体在方位上有小变化的目标[19]。另外通过仿真目标不同距离上的相位关系,将二维仿真目标扩展至三维,可以得到如下三维目标数据Dt(r)
Dt(r)=at[r](SerlingIV(ps)⊙Xt)
(22)
其中⊙为Hadamard积,表示空时数据Xt的每一项都乘上一个常数;ps表示仿真船目标的平均幅度,由目标所在距离元空时数据取平均所得

(23)
at为船目标复幅度向量,通过目标在距离维上的相位关系进行傅里叶变换所得
at=FT(ph⊙hr)
(24)
其中FT表示傅里叶变换;hr表示长度为rmax×1的汉宁窗口;ph为仿真目标在距离维上的相位信息
ph=[1,ej2πr0/rmax,…,ej2πr0(rmax-1)/rmax]
(25)
式中r0表示仿真目标所在距离单元;rmax表示雷达最大探测距离。
3 仿真结果分析
本节根据以上提出的海杂波模型对海杂波三维数据进行仿真,并与实测海杂波数据进行对比,从而验证提出模型的有效性。表1给出的是仿真模型所用到的参数,表2给出的是三自由度摆动运动的相关参数。为了更好的对海杂波进行仿真,本文在仿真模型中加入了20dB的高斯白噪声。

表1 模型参数列表

表2 三自由度摆动参数
3.1 同一距离元一阶海杂波仿真结果与分析
首先根据表2中的三自由度摆动运动参数,考察船载平台以不同前向速度运动时,同一距离元一阶海杂波分布特性的变化规律。图6显示的是当船速分别为0 m/s、1 m/s、3 m/s和5 m/s时,50 km处某一距离元的多普勒频谱曲线。
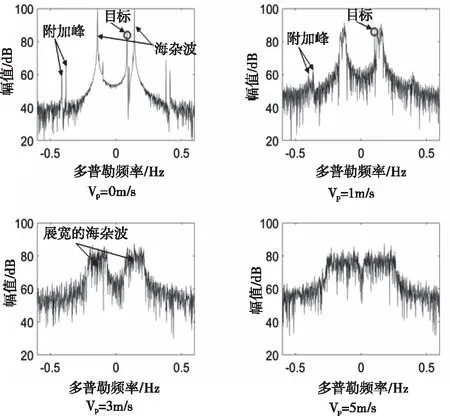
图6 同一距离元不同速度下的一阶海杂波多普勒谱曲线
图7显示的三自由度摆动运动下,50 km处不同前向速度运动下一阶海杂波角度-多普勒谱(AD谱)。图7中,仿真目标添加在该距离元方位角为60°的位置,其余弦值为0.5,故在图中在方位余弦为0.5处能量幅值最大。由图可见,当船载平台速度为0时,在AD谱中目标、一阶海杂波和附加峰都是一定多普勒频率的竖线。当船载平台前向速度增加后,一阶海杂波会在多普勒域中展宽,展宽的海杂波会逐渐把目标覆盖。此外,由三自由度摆动引起的附加峰也会因船载平台的运动而展宽,并逐渐被展宽的一阶海杂波覆盖。当船载平台速度很大时,会出现正负一阶海杂波重叠的情形,对目标的检测更加不利。
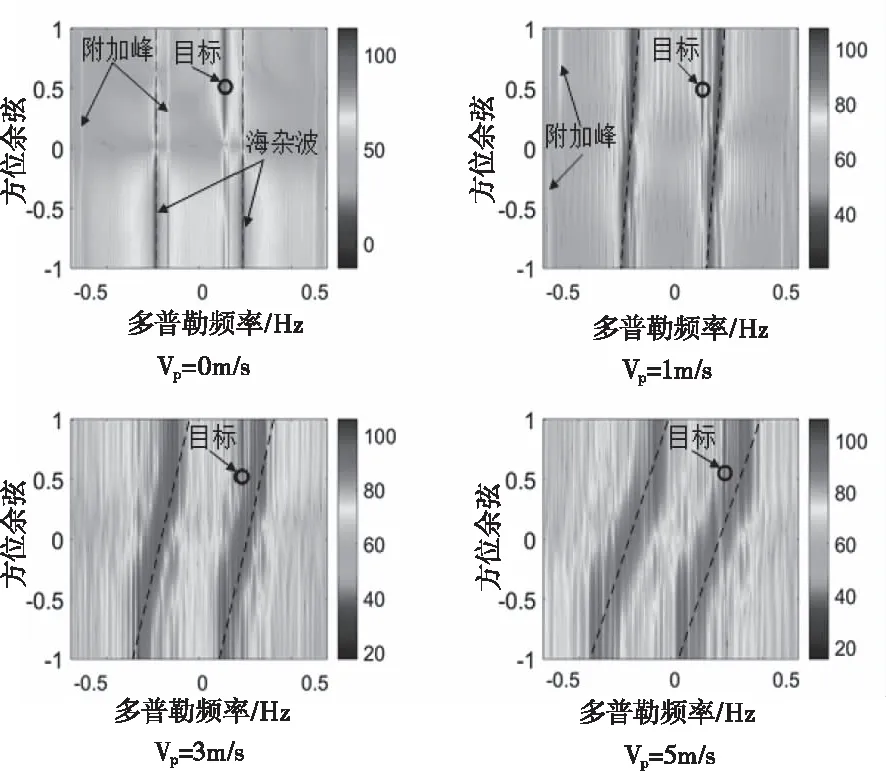
图7 一阶海杂波AD谱
3.2 不同距离元一阶海杂波仿真结果与分析
为了分析平台三自由度运动和前向运动对一阶海杂波在距离维度上分布特性,图8显示的是一阶海杂波距离-多普勒谱(RD谱)。本文将目标添加在50 km的位置,当速度为0 m/s时,目标在RD谱中为一个具有一定能量的点,目标在RD谱中为一个具有一定能量的点,但是很可能被附近的附加峰或一阶海杂波覆盖,这对目标检测造成困难。随着速度增加,一阶海杂波逐渐展宽,目标被高能量的一阶海杂波覆盖,同时附加峰也淹没在一阶海杂波之中。
除此之外,当速度为0m/s时,一阶海杂波在不同距离元上都表现为均匀的同分布,只是表现出一定的幅值衰减。但是随着船载平台运动速度增加,如图8船载平台速度Vp=3m/s时,区域1和区域2在不同的距离元,除了有幅值上的衰减以外,不同距离元还表现出不同的分布特性,并不服从均匀同分布。这种差异会导致协方差矩阵估计不准确,为后续海杂波抑制算法的研究造成困难[19]。主要原因是由于船载平台运动时,实际观测点的杂波块的角度和源点处的角度是不一样的,这导致在不同距离上的海杂波会有不同的分布,以上结果分析与1.3节理论分析一致。
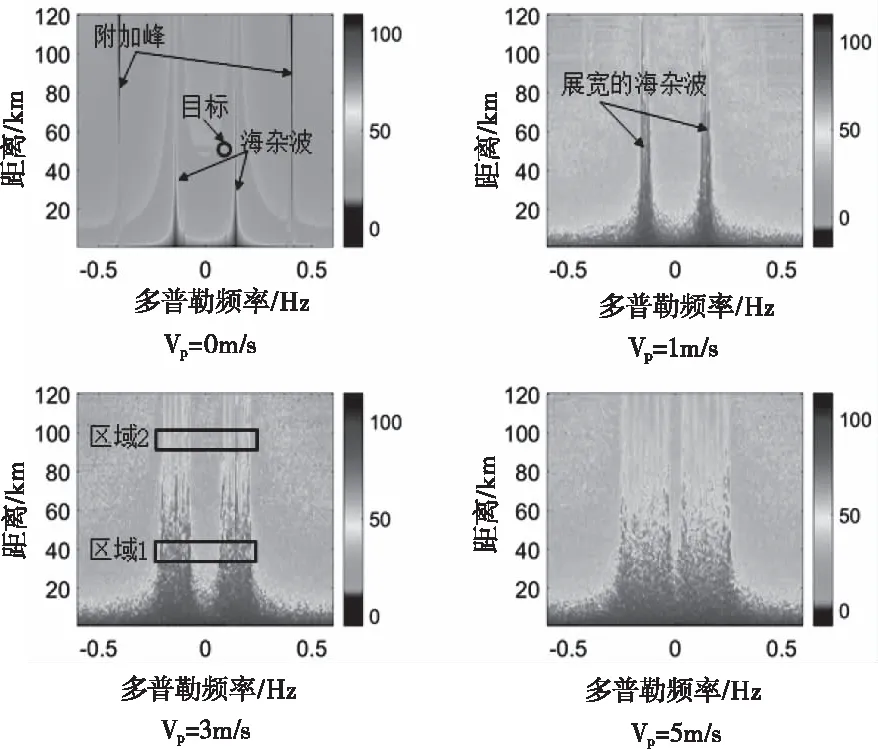
图8 一阶海杂波RD谱
3.3 一阶海杂波仿真结果对比
为进一步说明本文提出的改进海杂波模型的有效性,分别于传统模型仿真结果和实测海杂波实验结果进行了对比,本文实测实验结果来自于威海移动站2019年7月20日7时51分测得的数据,传统模型和改进模型仿真雷达参数如表1所示都与实验雷达参数一致。其中在传统船载海杂波时空分布模型[16][17]中,在一个相参积累周期(约2.5分钟左右)内,海杂波子块的回波入射角度是不变的,且假设不同距离元的海杂波分布具有独立同分布特性。图9显示的是船载平台在三自由度摆动下,舰船前向速度为5m/s时三种方法的RD谱对比,和一个距离元截面的多普勒谱曲线对比。
由于实测数据受到电离层杂波的干扰影响较大,仿真数据不考虑电离层杂波,本文仅拿图9中方框区域作对比,由图9(a)可见,传统模型的海杂波RD谱图,除了在距离维呈现幅值衰减外,海杂波在距离维上呈现出基本一致的分布特性。而由图9(c)可见,实际的海杂波RD谱图上,除了电离层杂波和地杂波之外,不同距离元上的一阶海杂波其分布特性出现较大不一致性。由图9(b)可知,本文改进模型生成的海杂波RD谱图,在距离维上也呈现出分布特性的不一致性,这与实际船载海杂波分布特性更为接近。另外,如三种模型的多普勒截面,本文因考虑了船载平台运动引起海杂波回波入射角改变的因素,所得的一阶海杂波多普勒曲线的分布特性很不均匀,这与图(c)实际的一阶海杂波多普勒曲线更加接近。然而传统模型中虽然加入了高斯白噪声,但是其仍然无法模拟出实测海杂波的不均匀特性。
为了更好地展示本文模型和传统模型在不同距离元上分布特性的差异,图10显示的分别50 km和110 km处两个距离元的多普勒截面曲线。图10(a)为传统模型两个距离元上的多普勒截面,图10(b)为改进模型两个距离元上的多普勒截面曲线。易于发现,本文改进模型在不同距离元上除了有明显的幅值衰减外,在不同距离元上的分布特性也是不一样的。而传统模型在不同距离元上的分别形状特性是完全一致的,仅在幅值上出现衰减。
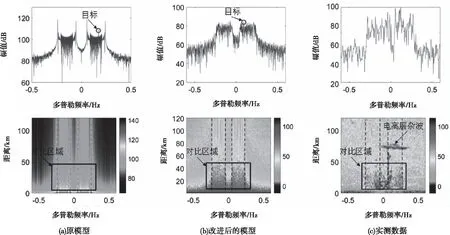
图9 仿真模型对比
如图11所示的是三自由度摆动影响下,目标位于50 km处,舰船前向速度为5m/s时三种方法的AD谱对比。由图11(a)所示,传统的一阶海杂波AD谱在一阶海杂波展宽的边缘幅值都非常高,但是如图(c)所示,实际上不同多普勒频率的海杂波分布是非常不均匀的,展宽边缘处的幅值不是最大的。由图(b)可见,本文改进的模型在展宽边缘处的幅值不是最大的,另外不同多普勒频率上的海杂波幅值变化也是非常不均匀的。从AD谱中可以看出本文改进模型的AD谱更接近实际数据的AD谱。
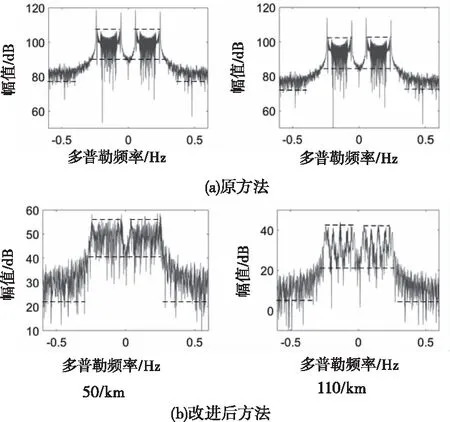
图10 一阶海杂波多普勒截面
总之,在一个相参积累周期内,由于船载平台的运动,不同时刻海杂波子块的回波入射角是变化的,且不同距离元海杂波子块回波入射角的变化规律也是不同的。这两方面入射角度随时间变化特点,就会导致海杂波分布的不一致性。因此,理论分析和实验验证,都证明了本文提出的海杂波改进模型与实际海杂波分布特性更为接近或有效。
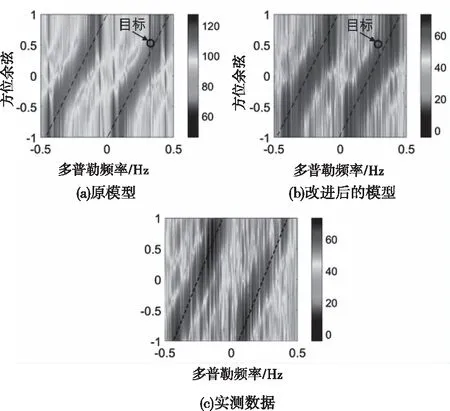
图11 仿真模型AD谱对比
4 总结
本文针对具有均匀阵列的船载HFSWR系统,利用空时建模的方式,对一阶海杂波的空时分布特性进行研究,并在传统空时模型的基础上,提出了新的改进模型。改进模型引入了船载平台在相参积累时间内,海杂波子块回波入射角随时间变化的规律,以及不同距离元海杂波子块回波入射角随时间变化的规律。新的海杂波仿真模型生成的一阶海杂波在距离尺度上具有分布特性的不一致性。仿真结果表明,本文提出的海杂波模型相对于传统海杂波模型,更贴近实测的海杂波的分布特性,为以后船载HFSWR海杂波抑制算法的研究提供有力的仿真数据支撑。
在今后的研究中,将通过更多的运动参数、不同的海况、雷达参数、以及信号传播要素等来研究船载HFSWR海杂波的分布特性与在线抑制方法。