基于PLC的气动机械手控制系统设计
2023-03-11左右祥
靳 宏,左右祥
(1.广东水利电力职业技术学院,广州 510925;2.中导光电设备股份有限公司,广东 肇庆 526238)
气动机械手是广泛应用于现代工业生产中的执行机构。使用压缩空气作为传输介质,具有反应速度快、绿色无污染、低价高效率和稳定可靠等特点。气动机械手在工业生产应用中发挥着重要作用[1]。
本设计中,气动机械手的控制系统以S7-200 SMART PLC为核心控制器,可以使机械手完成上下、左右、伸缩和抓紧松开等动作,实现对工件物料的搬运。
1 控制系统的硬件设计
本设计中,气动机械手的结构主要由基座平台、升降系统、伸缩手臂和气动手指4部分组成。基座平台由摆动气缸和支撑平台构成,主要任务是支撑和左右转动机械手;由薄型气缸和提升机构构成的提升系统,完成在基座上做上下直线运动;由手臂伸缩气缸构成的伸缩手臂完成手臂的前后伸缩运动;由气动手指及其夹紧机构实现零件的夹紧或放松。气动机械手机械结构图如图1所示[2]。
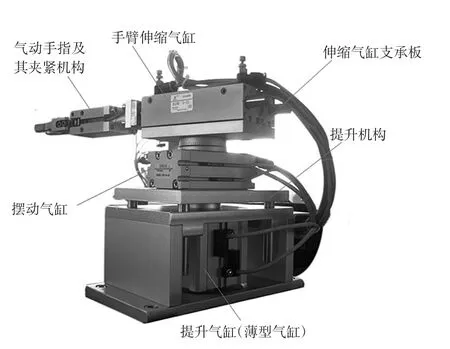
图1 气动机械手机械结构图
控制系统的核心控制器选用S7-200 SMART 200 ST40 DC/DC/DC PLC,利用磁性开关检测气缸活塞的运动到位情况,用光电开关作为物料有无的信号检测。
PLC编程控制电磁换向阀的阀芯位置,进而可改变压缩空气的流通方向,气缸的运动方向也随之改变。通过气缸的运动控制,实现机械手的上下、左右、伸缩、抓紧和松开等动作。
气动系统由空压机等气源系统,单电控和双电控电磁换向阀等气动控制元件,薄型气缸、旋转气缸、气动手指和标准气缸等作为气动执行元件,以及气动三联件、快速排气阀等各种气动辅助元件组成[3]。
2 传感器设计选型
2.1 磁性开关
该设计所选用的气动执行元件的到位信号传感器都是磁性开关。各个气缸的缸筒选用导磁性弱、隔磁性强的材料,如硬铝、不锈钢等。活塞是非磁性体,上面安装一个永久磁铁的磁环。磁性开关安装在气缸外侧,通过监测磁环的磁场来间接检测气缸的活塞位置[2],如图2所示。

图2 磁性开关检测活塞位置原理示意图
触电断开或闭合的信号发给PLC,以实现对气缸位置的监测,通过与触点处于正逻辑关系的LED的亮灭可以实时观测触点或者活塞的位置,方便调试。磁性开关传感器的内部电路情况和图形符号如图3所示。
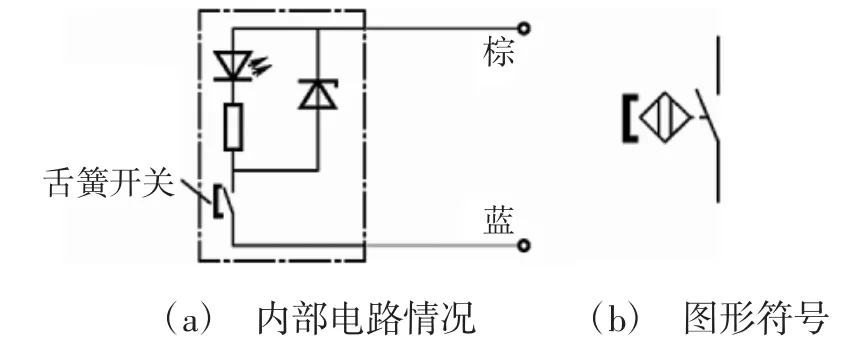
图3 磁性开关传感器的内部电路情况及图形符号
2.2 光电开关
光电传感器是利用光的各种特性来检测有无物体、物体表面变化情况等的传感器。其中输出信号是开关量的光电传感器,称为光电开关[4]。
光电开关由光发射器和光接收器2部分组成。漫反射式光电开关的光发射器与光接收器处于同一侧,且集成一为体。投光部发射出的光线照射到被测物体上后,反射回来的光线被受光部接收到并使开关状态翻转。漫反射式光电开关工作原理示意图如图4所示。

图4 漫反射式光电开关工作原理示意图
该控制系统中,用来检测有无工件的光电开关是一种漫反射式的光电开关。选用型号为OMRON(欧姆龙)公司的CX-441(E3Z-LS63)。该光电开关能同时把工件有无信息传送给PLC,方便进行动作模式调试和检测距离调试。该光电开关的外观图如图5所示。图中动作转换开关是进行动作模式调节,灵敏度旋钮用来调节检测距离。
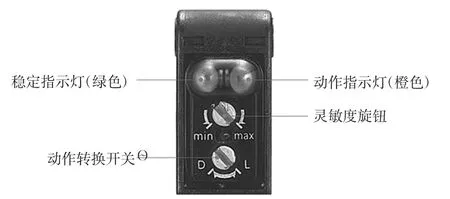
图5 E3Z-LS63型光电传感器
3 系统控制方案设计
3.1 电气设计
气动机械手控制系统需11个输入量,9个输出量,选用了S7-200 SMART系列PLC的SMART 200 ST40 DC/DC/DC。该型号的CPU具有24点输入和16点晶体管输出点位,在满足当前点位需求的同时也方便后续的扩展使用。
控制系统的I/O控制点位分布见表1,电气连接图如图6所示。

图6 控制系统电气连接图
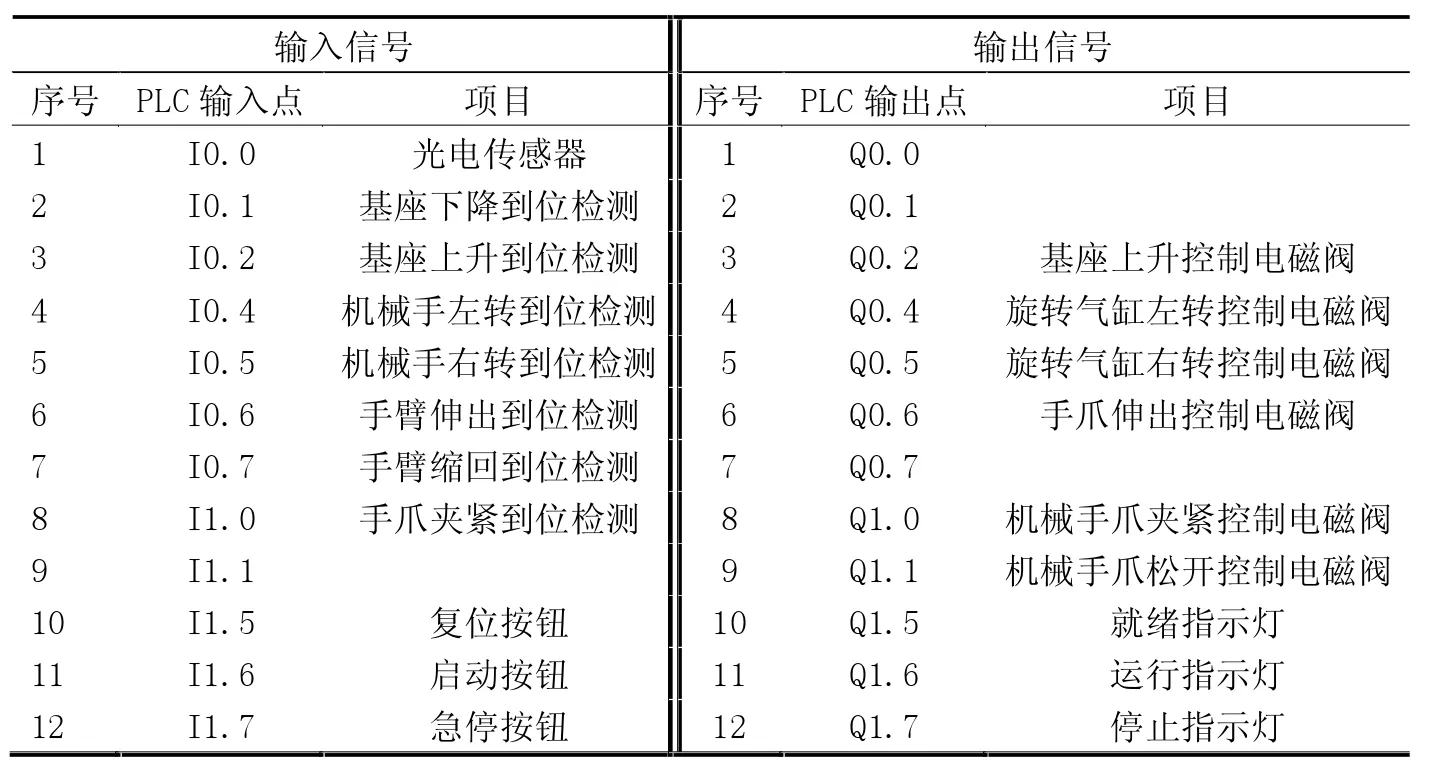
表1 控制系统的I/O控制点位分布表
CPU的输入信号,包括来自三线制的物料检测传感器BG1,检测气缸到位情况的二线制的磁性开关,以及控制系统运行的复位按钮SB1、启动按钮SB2和急停按钮QS。
CPU的输出信号,有控制抬升机构升降和手臂伸缩的单电控电磁阀,控制回转气缸左右旋转和手爪松紧的双电控电磁阀,以及显示系统运行状态的准备就绪指示灯HL1、运行指示灯HL2和停止指示灯HL3。
3.2 程序设计
根据系统工作要求和I/O分配表,进行了程序设计和编辑。程序先进行系统状态自查,满足启动条件且启动按钮被按下后,系统的运行过程被分成了5步。如图7所示。
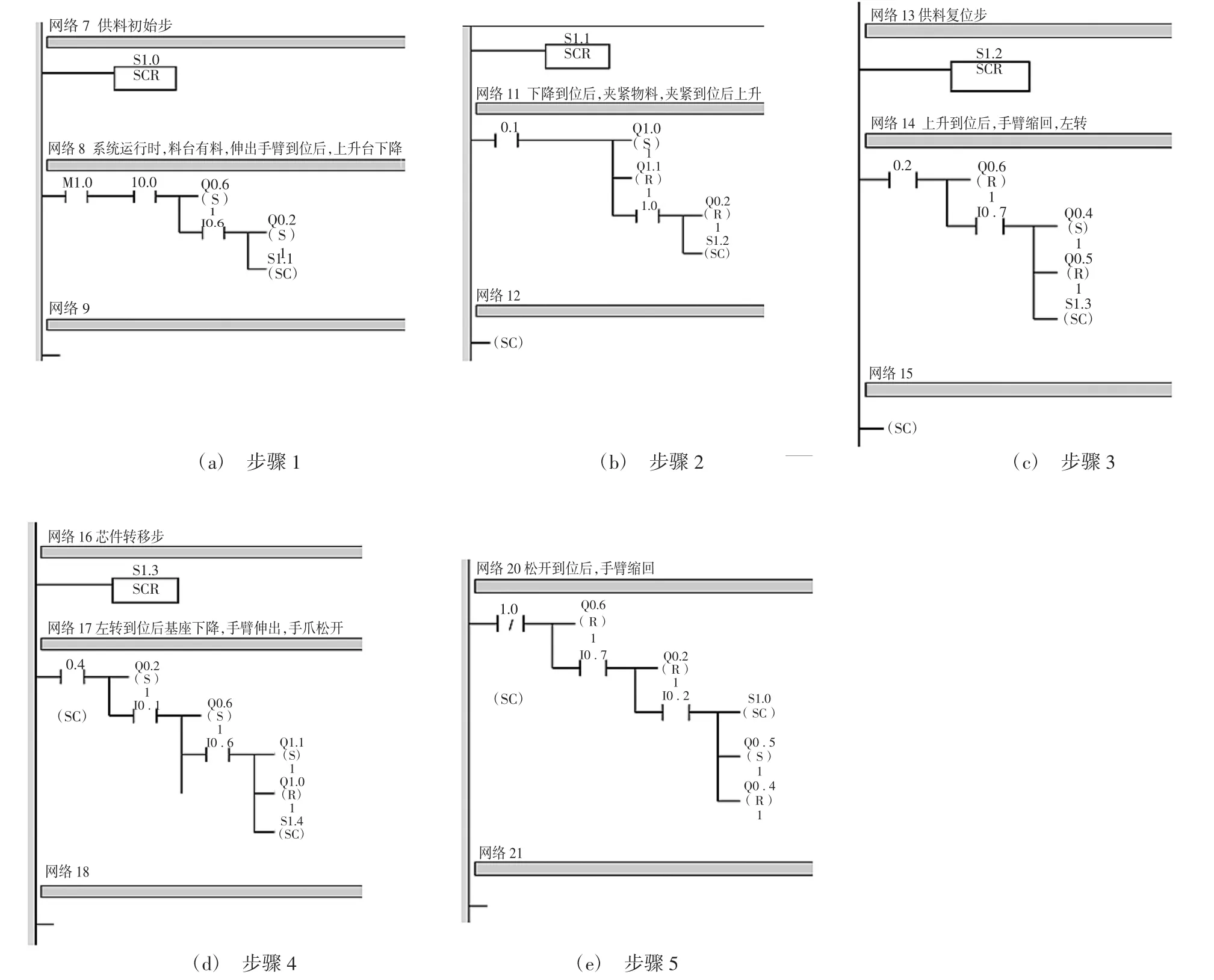
图7 程序主要步骤
4 系统工作过程测试
完成以上设计系统的机械和电气安装后,下载程序进行系统工作调试,调试过程如下。
1)设备上电和气源接通后,按下复位按钮执行复位操作,使各个气缸满足初始位置的要求,复位完成,就绪指示灯常亮,表示系统准备好。(注:气缸初始位置是指提升气缸在上限位,摆动气缸在右限位,伸缩气缸在缩回状态,气动手指在松开状态。)
2)当系统准备好后,按下启动按钮,系统启动,就绪指示灯灭,启动灯常亮,开始进入正常工作过程。
3)正常工作动作过程示意图如图8所示:①右侧料台上有料,抓取机械手装置伸出手臂,基座下降,从供料站出料台抓取工件;②抓取动作完成后,基座上升,机械手缩回,左转;③到达取料站物料台的正上方后,基座下降,手臂伸出,手爪松开把工件放到左侧取料站物料台上;④放下工件动作完成后,机械手手臂缩回,基座上升,摆台右转;⑤一个工作周期结束,当供料台有物料则自动进入下一个工作周期。
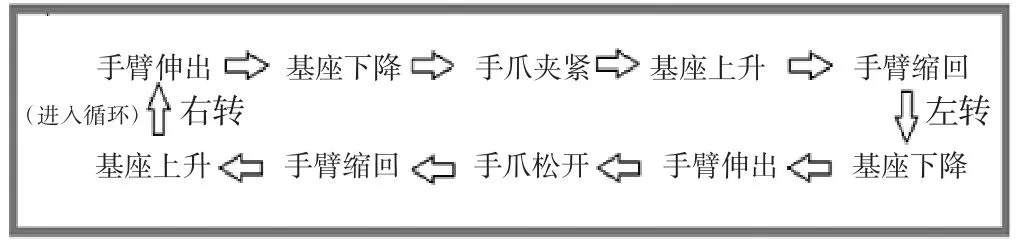
图8 机械手正常工作动作过程示意图
4)系统停止。若在工作过程中按下急停按钮,则系统立即停止运行,启动灯灭,停止灯亮起。再次按下启动按钮后系统从停止前的断点开始继续运行。
5 结束语
采用PLC控制、压缩空气驱动的机械手具有绿色环保、低价高效、结构简单且安全稳定等特点,能实现把工件从右边物料台送往左边工作台的自动、周期性运行。物料监测开关和各个气缸处的到位磁性开关可实时反馈机械手的运行状态给PLC。实验表明,本设计中的机械手控制系统能够按照生产要求平稳运行、可靠工作。
