融合北斗/GNSS定位和5G通讯的地基激光雷达测量系统
2023-03-10齐慧慧郭可才周玉泉李登科
郭 明, 齐慧慧, 郭可才, 周玉泉, 李登科
(1.北京建筑大学 测绘与城市空间信息学院,北京 102616;2.代表性建筑与古建筑数据库教育部工程研究中心,北京 100044;3.现代城市测绘国家测绘地理信息局重点实验室,北京 100044;4.建筑遗产精细重构与健康监测北京市重点实验室 北京建筑大学,北京 100044;5.北京申信达成科技有限公司,北京 102444)
1 引言
以激光点云为代表的三维地理信息数据已经成为国民经济建设的基石,行业应用领域对三维地理信息的需求量也日益剧增[1-2]。泛在测绘技术获取的点云数据是数字基础设施的核心,激光雷达测量技术是泛在测绘技术的重要组成部分,已经成为空间数据获取的重要手段[3-5],但激光扫描获取海量点云数据处理困难,难以为数字孪生[6]、物质文化遗产监测[7-8]、特大异形建筑施工运维分析[9]等需要远程自动采集、存储和传输数据的实时应用领域提供数字基础设施。第五代移动通信技术(5G)时代的到来,以毫米波通信为代表的技术引起广泛关注,5G具有高速率、低时延、大容量等特征,采用5G通信技术更能保证数据的可靠性和及时性[10-11]。同时,我国自主研发的北斗导航系统已全面开通服务,可为全球用户提供高精度定位、导航和授时等服务[12-15]。为实现海量激光点云异地实时传输,结合北斗/GNSS定位和5G技术研制一款地基激光雷达测量系统。
对于北斗卫星导航系统和5G通讯技术的研究,目前大部分专家学者都将其应用于城市交通、无人驾驶等方面,对于北斗卫星导航系统和5G通讯技术在地基激光雷达方面的应用还比较稀缺。市场上现有地基激光雷达,如FARO公司的FARO Focus S350激光雷达,集GPS、指南针、高度传感器及双轴补偿器扫为一体,扫描距离达到350 m,扫描速度高达每秒976 000点。RIEGL公司推出的VZ-400i地面激光雷达,内置惯导,提供了3G/4G通讯接口、Wi-Fi和以太网交互硬件,可通过WiFi和4G将激光点云数据实时导入云端,配备处理平台可以同时进行数据在线拼接。该公司推出的VZ系列可进行超长测距的VZ-6000三维激光扫描仪,提供超过6 000 m的超长距离测量能力,甚至可以在沙尘、雾天、雨天、雪天等能见度较低的情况下使用并进行多重目标回波的识别,适用于雪地和冰川测量。天宝公司研制的TrimbleTX8三维激光扫描仪测距范围约为120 m,凭借LightningTM技术,数据获取速度高达每秒一百万个精确激光点,可以获得具有良好完整性的数据结果,内置集成HDR相机可实现快速图像获取用于生成彩色扫描,大大提高外业生产率。国内如数字绿土公司推出的Li-Pod大空间激光雷达集激光扫描、影像采集、GNSS[16]坐标获取为一体,无需标靶特征,短时间内即可快速采集数据,测距精度为±3 cm,并通过WIFI热点的方式进行设备连接。北科天绘的U-Arm系列地面三维激光激光雷达,内置GNSS板卡,数据采集频率最高可达600 KHz。以上市场上主流公司研制推出的激光雷达虽大都内置GNSS板卡,但没有一款结合5G通讯技术,更不具备海量激光点云实时处理系统,无法进行海量数据的实时传输处理[17-22]。为了填补这一市场空白,解决海量激光点云实时处理困难问题,本文融合北斗/GNSS定位和5G技术研制了一款地基激光雷达测量系统。该激光雷达测量采用独特的非重复扫描方式,能获得更高的点云密度和探测距离,可探测远至260 m外的物体,数据采集频率可达100 KHz,内置北斗/GNSS接收模块和5G模组,可通过5G实时云传输,并利用北斗/GNSS接收模块获取时间进行时间同步,获取坐标信息并结合线性插值算法、罗德里格矩阵及ICP算法进行点云实时配准获取完整点云,并采用分层调度策略进行可视化。
本文分析了海量激光点云实时处理需求,提出结合5G通讯技术和北斗/GNSS定位模块研制一款地基激光雷达测量系统。利用激光雷达模块获取激光点云,高精度电机获取角度信息,北斗/GNSS获取时间并进行时间同步,通过5G技术实现海量激光点云异地实时传输,终端通过线性插值算法进行多帧点云配准,根据北斗/GNSS提供坐标中心进行多站激光点云粗配准,室内无GNSS环境则根据室内特征进行多站点云数据粗配准,并采用ICP算法进行精配准以完成整体配准,通过LOD调度策略实现海量激光点云高效可视化。实验表明,该测量系统可通过5G通讯技术异地实时发送海量激光点云数据,并配备数据预处理程序,填补了利用北斗/GNSS和5G技术研制激光雷达这一领域的空白,具备相当市场价值。
2 地基激光雷达测量系统集成
2.1 系统总体设计
本文采用多线式三维激光扫描仪作为激光雷达传感器,使用国产高精度电机作为激光雷达的旋转平台,配置指北针和双水准气泡并结合北斗卫星导航系统及5G通讯模组研制地基激光雷达测量系统。指北针和双水准气泡保证扫描初始指北,激光雷达扫描获取被测场景点云信息,由于激光雷达采集到的所有的帧数据都是同一个角度,为得到完整的点云数据配备外部高精度电机,以获取角度信息。通过北斗/GNSS接收模块获取时间信息,嵌入式微控制器将时间信息解码成时间戳,并利用自主研发的时间同步模块将时间信息同步给激光雷达和高精度电机。通过5G模组,将实时扫描数据发送给远程终端,终端接收数据后通过自主研发的数据预处理程序进行处理得到完整点云数据。对处理后的激光点云数据进行数据分割及格式转换,得到具有多细节层次的3DTiles瓦片结构,并结合LOD调度策略实现激光点云数据高效可视化。地基激光雷达测量系统整体设计如图1所示。
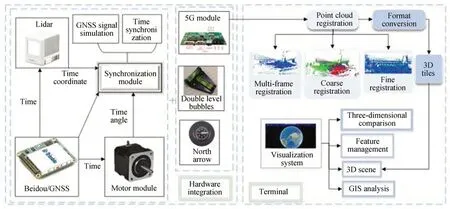
图1 地基激光雷达测量系统整体设计Fig.1 Overall design of ground-based LiDAR measurement system
2.2 系统硬件集成
如图2所示,测量系统整体以三脚架为支撑,并配置指北针和双水准气泡,保证每站扫描初始方向一致,矫正电机零位,电机零位和激光雷达初始位置一致,扫描阶段激光雷达旋转中心和电机旋转轴一致,保证了旋转过程中相对位置一致。系统主控芯片采用STM32F103CBT6,通过自主编写程序激光雷达启动,同时通过嵌入式微控制器操控高精度电机进行旋转工作,北斗/GNSS接收机接收GPRMC时间信号和PPS秒脉冲数据,通过RS232总线将时间信号传输给嵌入式微控制器,同时将PPS信号传输并转换成嵌入式微控制器能够识别和采集的TTL串口信号。嵌入式微控制器将时间信号解码转化成UNIX时间戳,最终通过并通过485接口传输给高精度电机、激光雷达。计算机获取带有时间标签文件,利用5G通讯技术将采集数据实时发送到到远程终端,终端通过自主研发的配准程序进行数据处理后并进行可视化展示。

图2 系统硬件集成Fig.2 System hardware integration
3 激光雷达测量系统时空配准
3.1 多模块时间同步
为了获取完整点云,以时间标为索引,通过对标时间标签,使点云帧数据旋转对应的角度,进而实现点云的配准。激光雷达扫描得到的点云可记录海量的空间三维点坐标,但点云并不带有时间标签,需要接入外部时间,而且本测量系统采用的激光雷达需要输入GNRMC/GPRMC格式的时间数据,并通过pps秒脉冲信号的方式进行时间同步;高精度电机也同样不配备时间设备,同样需要外部时间信息,因此可以通过接入北斗模块的方式进行时间同步,北斗/GNSS接收机将产生的PPS信号输入到激光雷达的PPS信号输入接口,时间字符串通过RS232串口发送到激光雷达的时间数据接口,频率与PPS信号相同。激光雷达接收到一对PPS和时间字符串之后,内部高精度定时器与PPS对准,将对准的某一PPS对应的时间字符串作为激光雷达的时间基准,实现激光雷达时间同步,同时嵌入式微控制器将时间信号解码转化成时间戳通过485接口传输高精度电机,实现电机时间同步。
室内工作室通常是处于无GNSS的环境,如何在无GNSS下对点云进行配准,以获取全部点云也是需要解决的问题。为解决该问题,利用嵌入式开发,给嵌入式微控制器编写了一个可以产生虚拟GNRMC/GPRMC时间和PPS秒脉冲信号的功能。嵌入式微控制器产生PPS秒脉冲通过RS232转485的方式将PPS信号输入激光雷达,产生的虚拟GNRMC/GPRMC时间通过SDK协议传输给激光雷达,使激光雷达的点云数据带有时间标签;嵌入式微控制器还接收高精度电机返回的角度数据同时打标虚拟GNRMC/GPRMC时间并传输给计算机,使得计算机得到带有时间标签的角度数据。
3.2 点云数据整体配准
3.2.1 多帧点云数据配准
激光雷达扫描获取得到单帧点云文件,由于激光雷达不配备旋转电机,因此采集到的所有的帧数据都会是同一个角度,若想得到完整的点云数据则需要对采集到的点云数据匹配角度信息。本文采用时空同步方法进行多帧点云配准,安装阶段电机零位和激光雷达初始位置保持一致,实验前矫正电机零位,使电机零位固定,扫描阶段,激光雷达旋转中心和电机旋转轴一致,保证了旋转过程中相对位置一致。并采用时间同步思路,根据时间信息将外部电机获取角度信息匹配给点云数据。主要方法是遍历文件寻找两个文件对应时间,通过对标时间标签使相同时间的每帧点云数据匹配相应角度数据,并采用线性插值算法使得无法对标时间的点云数据获取对应角度得到完整点云文件。
多帧点云配准对标时间获取空间变换参数进而完成配准,初始点X(x,y,z,1)与配准点X′(x′,y′,z′,1)关系如式(1)所示:
式中:A为角度,T为时间。最终配准效果如图3所示。

图3 多帧点云数据配准Fig.3 Multi-frame point cloud data alignment
3.2.2 多站点云数据整体配准
由于被测场景复杂、仪器设备影响等原因,通常需要多个视角扫描,才能获取完整扫描场景点云,但多次扫描的点云可能不在同一坐标系下,存在着空间旋转错位关系。因此需对不同位置、不同视角扫描得到的点云通过坐标变换进行配准,将这些点云合并到同一个坐标系下,形成完整点云数据。室外处于GNSS环境下可根据北斗/GNSS测站信息作为坐标中心点进行粗配准,再使用ICP算法精配准,室内往往处于无北斗/GNSS环境下,但室内特征明显,可通过特征进行粗配准再使用ICP算法精配准。室外点云配准流程如图4所示。

图4 室外多站点云配准流程图Fig.4 Point clouds registration flow-process diagram
点云数据粗配准是将两站点云大致配准到同一坐标系下,为精配准提供良好的初始值。地基激光雷达测量系统配备指北针和双水准气泡,设定每站扫描启动阶段回到指北针初始位置,双水准气泡在近距离范围内水平与垂直定向,保证每站都以指北针方向为初始方向,结合北斗/GNSS模块提供的北斗/GNSS测站信息作为坐标中心点,在模块安装阶段将其换算到激光雷达模块中心,从而保证多站点云坐标能够转换到同一坐标系下,完成多站激光点云粗配准。
室内特征配准根据SIFT特征点提取算法获取单站点云内的关键点,以关键点坐标欧式距离表征的三维位置相似度为基础,来估算它们的对应关系,确定同名特征点,一般由3个或3个以上不同的同名特征点计算出空间转换参数进而完成配准,相邻两测站中的同名特征点分别为X0=(x0,y0,z0)与X=(x,y,z),两点间偏移量为ΔX(Δx,Δy,Δz),两 点 之 间 有 如 式(3)所 示 的关系:
其中:λ是尺度参数,点云变换中尺度不变即λ=1;ΔX为偏移量,重心坐标分别为Xm和Xn,重心化坐标为:
坐标重心化后,同名点间的坐标转化如式(5):
线性化后得到旋转参数的误差方程:
粗配准后点云大致重合但精度不高,利用ICP算法再次配准提高配准精度。给定相邻两站点云,在X点集内搜索距离P中的每一个点Pi的最近点Yi,建立点对的映射关系的对应点集即为Y=,即Y=C(P,X)其中C为对应点的坐标变换,不停迭代直到满足精度为止。粗配准后的点云误差在7 mm以下,经过ICP算法再次配准的误差在3 mm以下。本节以校园内教学楼为实验区域,使用地基激光雷达测量系统,对教学楼一面进行布站扫描,并使用自主研发数据预处理程序进行处理得到完整点云,实现了自动化扫描与配准,有效节省了数据处理时间,配准后的数据未出现分层情况,精度满足各实时应用领域的需求。室外点云整体配准结果如图5所示。

图5 室外完整点云Fig.5 Outdoor complete point cloud
4 实时点云管理与可视化系统
4.1 激光点云数据5G实时传输
由于Wi-Fi网络的抗干扰性差,4G网络的传输速率和时延的限制,造成海量激光点云实时传输困难,而5G网络的高带宽、低延时、大容量等特性正可以解决这些技术瓶颈。地基激光雷达测量系统工作获取海量激光点云点云文件和角度文件,将采集的全部数据打包压缩,传输给5G模块,当5G通讯模块接受到数据后,利用云端服务器,通过内网穿透映射传送给远程终端。通过测试证明使用5G模组传输速率可达50 Mbit/s,能够实现海量激光点云实时传输,具体传输流程如图6所示。

图6 5G数据传输流程图Fig.6 5G data transfer flow-process diagram
4.2 终端激光点云数据加载与可视化
本文采用自主开发的实时点云管理与可视化系统,主要由点云数据传输模块、点云数据预处理模块、GIS分析模块、功能管理模块、三维场景模块、三维比对模块组成,各个模块间各自分工又相互协作,可对地基激光测量系统获取的激光点云数据进一步管理和应用。系统架构如图7所示。

图7 系统架构Fig.7 System architecture
系统主界面如图8所示,用户可进行三维数据分析、数据加载、实时监测以及三维场景可视化等。

图8 实时点云管理与可视化系统Fig.8 Real-time point cloud management and visualization system
为了实现海量激光点云高效可视化对点云构建具有多细节层次的3DTiles瓦片结构,通过八叉树分割算法将场景文件分割成多细节层次散列文件,将散列文件转化为pnts瓦片数据格式,并将瓦片数据的地理空间位置、旋转矩阵、几何误差等信息按照八叉树空间数据结构生成索引文件,最终生成3DTiles瓦片结构。激光点云构建3D Tiles的流程如图9所示。

图9 构建3D Tiles流程图Fig.9 Building 3D Tiles flow-process diagram
同时在可视化过程中引入LOD调度策略,使用屏幕空间误差SSE=geometricError×height/distance×sseDenominator来决定瓦片的细节层次,去加载调度不同级别的瓦片数据。数据可视化效果如图10所示。

图10 点云数据可视化效果Fig.10 Point cloud data visualizations
5 结论
本文将5G通讯技术与北斗/GNSS定位模块相结合研制了一款价格低廉、携带方便的地基激光雷达测量系统,并配备自主研制的时间同步模块、点云预处理程序及实时点云管理与可视化系统,实现海量激光点云从采集、处理到应用一体化。实验结果表明,5G通信技术可以有效解决海量激光点云远程实时传输问题,配备自主研制点云预处理程序可供用户快速获取完整点云数据,可为数字孪生、物质文化遗产监测、特大异形建筑施工运维分析等实时应用领域提供数字基础设施,具有广泛的应用价值和较大的经济效益。
