融合点云在古旧建筑物改造修缮中的应用
2023-03-09高元鹏
高元鹏
(海南水文地质工程地质勘察院,海南 海口 570100)
0 引言
古建筑是凝固的艺术,是历史的痕迹。但是随着风雨的侵蚀,许多古旧建筑物破败不堪,急需进行改造修缮,而在改造前需要获取建筑物详细的平、立、剖面图纸等基础资料[1]。目前常用的测量方法有全站仪方法、尺量法等,这些方法测量效率低下且易漏测、采集信息不全面,不能够很好地满足设计、施工的需求。针对这些问题,国内学者做了很多的研究,提出使用地面三维激光扫描仪来对建筑物进行测量,三维激光扫描仪可以高效、全面地进行现场数据采集,同时还可以获取现场的照片、纹理等信息[2-5],但是该方法无法对屋顶等视觉盲区进行测量。针对这个问题,采用一种地面三维激光扫描点云与无人机倾斜点云相结合的方法。通过计算两种点云数据之间的转换参数,将地面三维激光扫描点云与无人机倾斜点云的屋顶部分进行融合,可以得到完整的建筑物点云数据[6]。根据对实际案例的应用分析,融合点云的精度较高,满足绘图的要求。绘制得到的平立剖图纸以及融合点云数据有效地保障了筑物改造修缮工作的顺利进行。
1 数据获取
1.1 地面扫描点云数据获取
三维激光扫描技术又被称为实景复刻技术,能够对扫描场景进行真实的还原,是测绘领域继卫星导航之后的又一项技术革新。相比于全站仪方法、尺量法等,具有非接触、扫描速度快、获取信息量大、实时性强以及自动化程度高等特点[7-9]。
1.1.1外业数据采集
外业作业使用Leica RTC360地面三维激光扫描仪(图1),Leica RTC360携带方便且扫描速率快,每秒钟可达200万点,极大地提高了外业效率。测量精度高,20 m内测量精度可达2.9 mm。

图1 Leica RTC360三维激光扫描仪
在进行外业扫描前,需要对现场进行踏勘并规划合适的扫描线路。同时应在建筑物的四角选取合适的标靶布设位置,并测量其绝对坐标。外业扫描时应保证相邻测站之间具有充足的公共部分,保证扫描的质量。
1.1.2数据预处理
点云数据预处理主要包括配准拼接、坐标系转换、噪声处理。对扫描数据进行配准拼接,可根据现场参照物是否充足选择目视配准和标靶配准,当重叠度过低或配准质量较差时,应及时补测。将拼接无误的地面点云数据通过七参数模型进行坐标系转换,采用的标靶点至少3个且应分布均匀。为了方便后续的绘图等工作,还应对噪声点进行去除,例如将外围无关数据进行剔除。
1.2 无人机倾斜点云数据获取
航飞前需要对现场进行踏勘,规划合理的航线,同时还需进行空域申请、数据资料收集、像控点布设和测量等工作。外业航飞采用飞马D200无人机搭载D-OP400倾斜模块进行作业。对外业采集像控点、影像及定位定姿系统(position and orientation system,POS)数据进行整理,针对影像中曝光不足、轻度雾霾等现象,进行匀色处理。进行空三解算后,导出点云成果[10-15]。
2 点云融合
地面三维激光扫描仪能够对建筑物的室内外进行详细准确地扫描,但是对于建筑物的屋顶等视觉盲区无法测量,这就会在建筑物点云上产生大片的孔洞,这就会对后续的绘图、设计等工作产生不好的影像。无人机倾斜点云能够对屋顶以及位置偏高的立面进行较好的测量,但是对于靠近地面或位置较低的区域会产生较大的变形。综合两种点云的优点,将两种点云数据进行融合,即可以得到建筑物完整的点云数据[16]。
以地面扫描点云作为基准点云,在地面扫描点云和无人机倾斜点云上选择4对以上的公共点,按式(1)计算坐标系转换参数,将无人机倾斜点云的屋顶部分转换至地面扫描点云上。
(1)
其中,
(2)
式中,θ、φ、φ为X轴、Y轴、Z轴所对应的旋转角;A、B、C为位移参数。
3 案例应用
现需对某建筑物进行改造,需要获取详细的平立剖图纸等基础测绘资料。由于建筑物复杂且需要信息较多,使用全站仪等方法无法满足测量要求,因此对改造建筑物使用Leica RTC360地面三维激光扫描仪进行扫描,外业共扫描196个测站,耗时20 h。经过数据处理后得到建筑物的内外点云数据,建筑物的屋顶点云数据明显缺失(图2)。

图2 地面三维激光扫描数据
同时采用全站仪方法对建筑物的特征点进行测量,并与扫描点云进行对比分析(表1)。X坐标较差绝对值最大值1.8 cm,绝对值最小值0.2 cm,中误差1.4 cm;Y坐标较差绝对值最大值1.7 cm,绝对值最小值0.3 cm,中误差1.1 cm;Z坐标较差绝对值最大值1.9 cm,绝对值最小值0.2 cm,中误差1.1 cm。根据对比分析结果,地面三维激光扫描数据与全站仪测量结果一致,地面三维激光扫描数据精度可靠。

表1 全站仪数据与地面三维激光扫描数据对比分析
对改造建筑物使用飞马无人机搭载D-OP400倾斜模块进行航测,经过数据处理后得到建筑物的倾斜点云数据,将倾斜点云数据与地面三维激光扫描数据靠近屋顶重叠区域的距离尺寸进行对比分析(表2)。较差绝对值最大值2.4 cm,绝对值最小值0.9 cm,中误差1.6 cm。根据对比分析结果,倾斜点云数据与地面三维激光扫描数据在靠近屋顶重叠区域相对关系一致,倾斜点云数据能够对屋顶等数据缺失部分进行很好的补充。

表2 倾斜点云数据与地面三维激光扫描数据距离尺寸对比分析
选取地面扫描点云和无人机倾斜点云公共点4对,按式(1)计算转换参数,将无人机倾斜点云转换至地面扫描点云上,转换残差见表3。X方向残差绝对值最大值1.7 cm,绝对值最小值0.6 cm,中误差1.1 cm;Y方向残差绝对值最大值1.2 cm,绝对值最小值0.7 cm,中误差1.0 cm;Z方向残差绝对值最大值1.1 cm,绝对值最小值0.4 cm,中误差0.7 cm。根据残差结果,转换精度较高。经过转换融合得到最终的建筑物点云数据(图3)。

表3 坐标转换残差表

图3 融合点云数据
将完整的点云数据通过CloudWorx插件导入CAD(计算机辅助设计,computer aided design)当中,根据建筑物布局重新定义坐标系。通过对点云数据在不同方向、不同位置做切片,在CAD当中即可以绘制出详细的平立剖图纸(图4),设计单位根据点云数据、图纸以及扫描仪拍摄的照片等信息即可以进行设计。
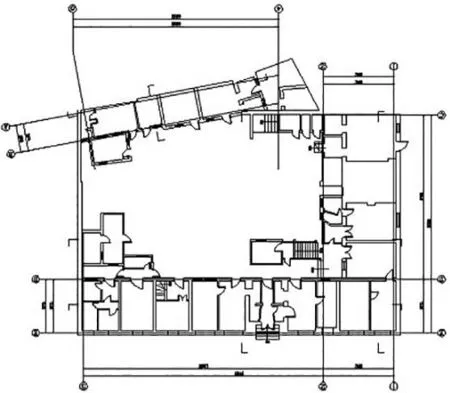
(a)分层平面图
4 结束语
针对常规的测量方法存在着效率低下、易漏测、采集信息不全面等问题,采用地面三维激光扫描仪进行数据采集,三维激光扫描仪能够在较短的时间内获取海量的点云数据以及颜色纹理等信息。但是地面三维激光扫描仪对于屋顶等视觉盲区无法进行测量,因此本文采用了一种融合点云的方法来解决这个问题。通过计算地面三维激光点云和无人机倾斜点云之间的转换参数,将地面三维激光点云和无人机倾斜点云的屋顶部分进行融合,即可以得到建筑物的完整点云。对融合点云做切片处理,即可以绘制得到建筑物的平立剖图纸。
根据对实际案例的应用分析,地面三维激光扫描数据与全站仪测量结果一致,点云精度可靠;倾斜点云数据与地面三维激光扫描数据在靠近屋顶重叠区域相对关系一致;坐标转换残差小,融合点云的精度较高。融合点云数据以及绘制得到的图纸能够很好地满足设计、施工等后续工作,保障了建筑物修缮改造工作的顺利进行。当前城市更新如火如荼地进行,基于融合点云的测量方法有效地解决了古旧建筑物测量难的问题,具有较高的应用价值。