基于车载点云数据的道路交通指示标志检测方法
2023-03-09邹亚洲
方 猛 邹亚洲
(浙江省测绘科学技术研究院,浙江 杭州 310030)
0 引言
移动车载激光扫描技术是一种能够在短时间内采集海量空间三维点云数据的新型测绘技术,具有全天候、高速度、高密度等显著特征,为面向智能化的城市空间地物信息提取提供了一种崭新的技术手段[1-2]。作为城市道路场景中的重要组成部分,交通指示标志内包含着道路场景中重要的指示信息[3],用于为驾驶员提供当前环境内行驶方向与驾驶行为等关键信息。交通指示标志在提升交通道路运行效率与运行安全起着至关重要的作用[4-6]。交通指示标志颜色较为固定,几何形状较为简单,易于驾驶人员分辨。但受光照与天气等因素影响,导致交通指示标志检测难度较大[7]。为降低道路交通安全事故的发生概率,需研究高效精度的交通指示标志检测方法,为驾驶人员提供精准的交通指示信息,避免安全事故发生。例如,尉天成等[8]通过先验知识,确定交通标志检测的目标候选框,降低候选框的冗余性,利用多尺度卷积神经网络,处理目标候选框,得到交通标志检测结果。该方法可有效识别小目标的交通标志。赵树恩等[9]通过直方图均衡法,预处理道路交通图像,利用轮廓检测方法,定位预处理图像内的交通标志,将定位结果输入深度卷积对抗神经网络内,输出交通标志检测结果。该方法的检测精度高达94.12%。但这两种方法在复杂场景下,均存在较大的局限性,且检测结果易受天气与光照等影响,检测稳定性较低。车载点云数据是在车辆上搭载车载移动测量系统,采集代表物体表面三维空间坐标信息的激光点云[10-11],因此不受天气与光照条件影响,具备较高的信息精度。为此,本文研究基于车载点云数据的道路交通指示标志检测方法,充分发挥车载点云数据的高精度几何特征与强度特征,实现道路交通指示标志精准检测,为智能化测绘的实际应用、道路高效管理与智能驾驶等领域提供一种新的数据获取路径。
1 道路交通指示标志检测方法
1.1 道路交通环境车载点云数据采集
利用车载激光扫描系统,采集道路交通环境车载点云数据,该系统的结构如图1所示。
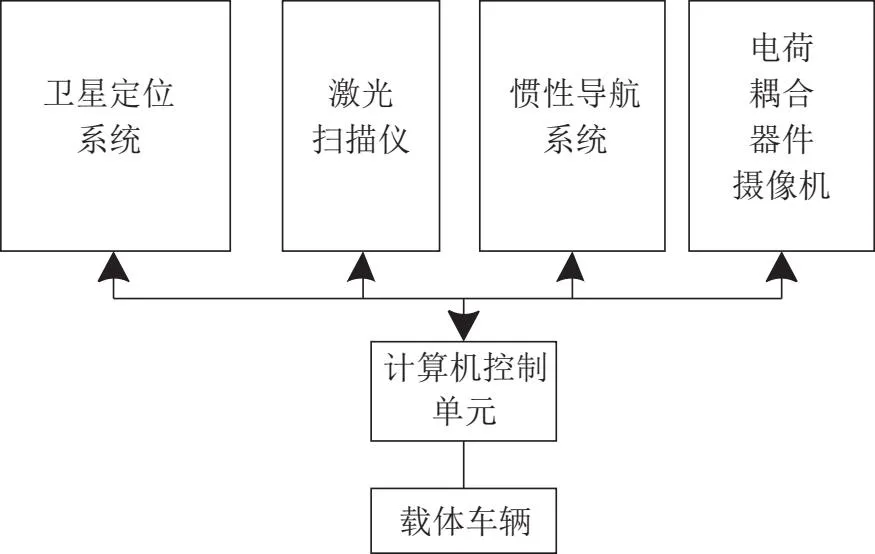
图1 车载激光扫描系统结构图
该系统利用激光扫描仪(laser scanner,LS)测量道路环境的空间信息;通过电荷耦合器件(charge coupled device,CCD)摄像机扫描道路环境区域,得到影像数据;采用全球定位系统(global positioning system,GPS)与惯性导航系统(inertial navigation system,INS)得到扫描点的三维空间坐标信息[12]。采集的全部信息均传输至计算机控制单元,利用计算机控制单元对采集的信息进行预处理,获取道路交通环境的车载点云数据。
令当下车载激光扫描系统的扫描点是V;V的坐标是V(X,Y,Z);GPS获取的车辆坐标是(XG,YG,ZG);INS获取的LS与大地坐标轴中经度、维度、高度间的夹角是(θy,θp,θr);被扫描的道路交通环境与车载激光扫描系统的相对坐标是(Xl,Yl,Zl);LS与道路交通环境间距离是D;LS的视线角度是γ,高低角度是H;V(X,Y,Z)的计算公式如下[13-14]:
(1)

(Xl,Yl,Zl)的计算公式如下:
(2)

1.2 道路交通指示标志与其余地物车载点云数据分类
首先,按照车载激光扫描系统、存储的扫描点发射角度构造双向扫描线索引;其次,通过移动动态窗口分类法,分类道路交通指示标志与其余地物车载点云数据。


(θn+1-θn)>Δθ
(3)
其中,邻近扫描点的角度值是θn+1、θn。
步骤2,按照LS的安装位置,确定θ,将其当成角度分割点。由于该点可能是噪声点,需按照LS至道路交通环境间的距离D,分析该点是否是道路交通指示标志点,若是噪声点,则继续分析其邻近点[18],以全部道路交通指示标志点完成搜索为止。利用角度分割点,将各条扫描线分开,构造双向扫描线索引。
利用移动动态窗口分类算法,结合双向扫描线索引,分类处理道路交通指示标志与其余地物车载点云数据,具体步骤如下:

步骤2,按照目标点集窗口内点集的几何特征因子,分析点集类型,即道路交通指示标志点或其余地物点。
步骤3,依据双向扫描线索引,以角度分割点为起点,对移动动态窗口展开分类,以找到全部道路交通指示标志点为止,完成道路交通指示标志与其余地物车载点云数据分类。
1.3 道路交通指示标志边缘信息提取
在1.2小节提取的道路交通指示标志车载点云数据V′内,利用Canny边缘检测算法[21-22]提取边缘信息,步骤如下:
步骤1,通过高斯平滑滤波器平滑处理V′,公式为
(4)
其中,高斯函数宽度是σ;卷积操作是*;平滑处理后的交通指示标志车载点云数据是I;交通指示标志车载点云数据的像素坐标是(x,y)。
步骤2,求解I的梯度幅值M与方向τ,公式为
(5)
其中,I在横纵方向上的偏导数是ρ、Q。
步骤3,滤波去噪,随机选择一个梯度方向τ,卷积处理该方向上的道路交通指示标志车载点云数据的二维高斯函数,完成滤波去噪。
步骤4,在滤波去噪后的道路交通指示标志车载点云数据内,找到最大梯度幅值Mmax,利用Mmax寻找道路交通指示标志车载点云数据的边缘,完成边缘信息提取。
1.4 交通指示标志检测的实现
利用双线性卷积神经网络(bilinear convolutional neural network,BCNN),在1.3小节提取的道路交通指示标志边缘信息内,提取道路交通指示标志特征,将其作为训练样本,输入支持向量机内,输出道路交通指示标志检测结果。
BCNN模型B的结构由四元组建立而成B=(fα,fβ,O,C),其中,交通指示标志特征函数是fα、fβ;池化函数是O;检测函数是C。利用O池化处理fα与fβ,通过将池化后的fα与fβ映射至样本标记空间。
(6)


(7)

(8)
道路交通指示标志检测具体步骤如下:
步骤1,利用车载激光扫描系统,采集道路交通环境车载点云数据。
步骤2,通过移动动态窗口分类算法,在采集的车载点云数据内,分类处理道路交通指示标志与其余地物车载点云数据。
步骤3,采用Canny边缘检测算法,在道路交通指示标志车载点云数据内,提取道路交通指示标志边缘信息。
步骤4,构造道路交通指示标志特征提取函数fα、fβ。
步骤7,BCNN模型通过步骤4与步骤6,完成交通指示标志特征提取,将其当成训练样本,训练支持向量机,通过训练完成的支持向量机处理测试样本,输出道路交通指示标志检测结果。
2 实验分析
以某城市的某条道路为实验对象,该条道路的长度大概是17.59 km,整体地势起伏较小,道路等级为Ⅱ级标准,使用年限是12 a,载荷标准是BZZ-100,交通等级是中轻交通。该道路中机动车道与非机动车道各两条,前者宽度是15 m左右,后者宽度是3 m左右。该条道路上共有6个交通指示标志,分别是最低限速、干路先行、人行横道、分向行驶车道、机动车车道与非机动车车道。
本文方法利用Rigel-VMX45车载激光扫描系统,采集该道路的车载激光点云数据,部分道路环境车载激光点云数据采集结果如图2所示。

图2 部分道路环境车载激光点云数据采集结果
根据图2可知,本文方法可有效采集道路交通环境车载激光点云数据,采集结果中可清晰呈现道路、地物与交通指示标志信息,为后续交通指示标志检测提供有力的数据支持。实验证明:本文方法具备道路交通环境车载激光点云数据采集的可行性。
利用本文方法对采集的道路交通环境车载激光点云数据进行分类,获取道路交通指示标志车载点云数据,如图3所示。
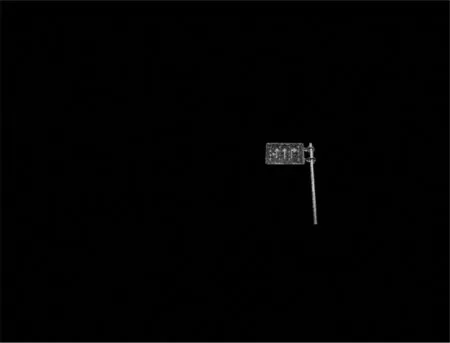
图3 交通指示标志车载点云数据
由图3可知,本文方法能够有效得到后续交通指示标志需要用到的交通指示标志车载点云数据。实验结果表明,本文方法具备交通指示标志车载点云和数据与其余地物车载点云数据分类的有效性。
利用本文方法对分类获取的交通指示标志车载点云数据进行边缘信息提取,边缘信息提取结果如图4所示。
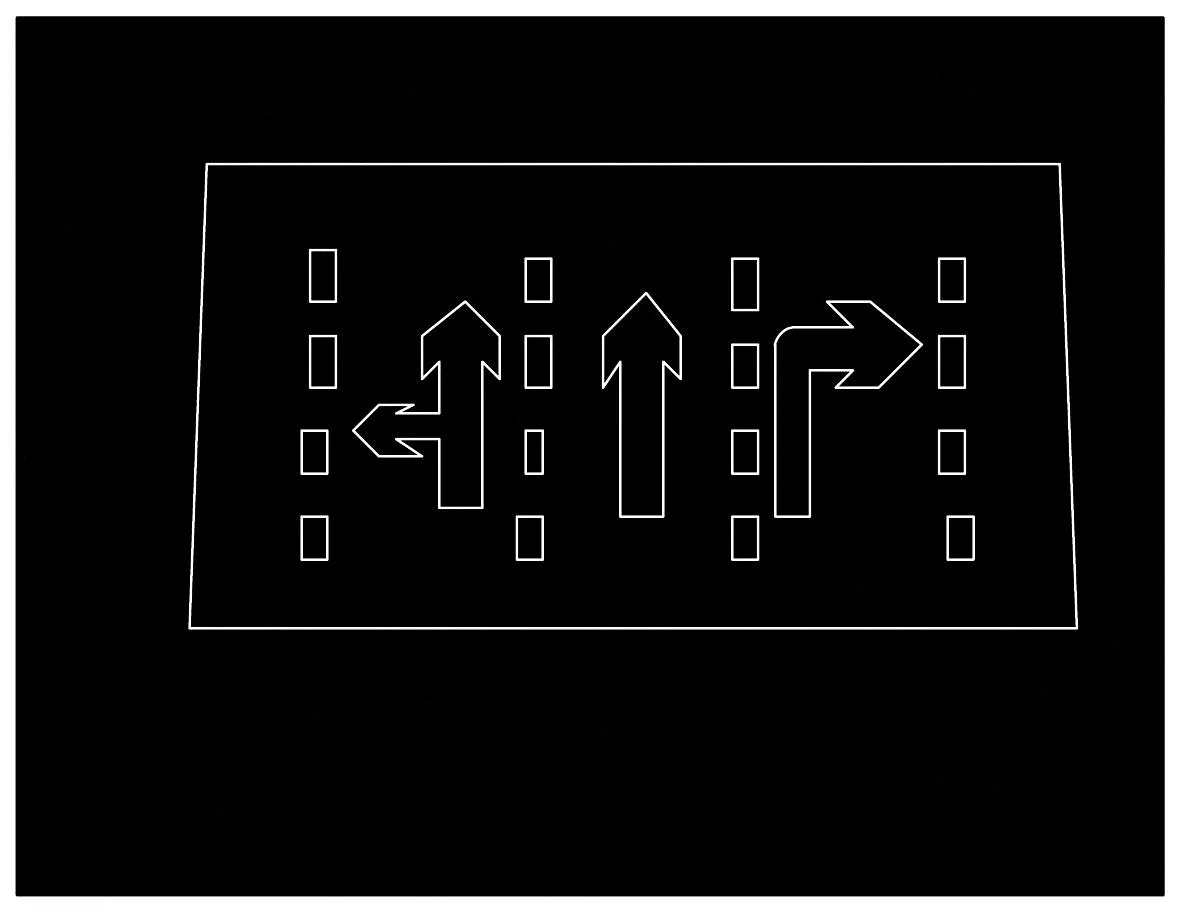
图4 交通指示标志边缘信息提取结果
根据图4可知,本文方法可在有效交通指示标志车载点云和数据内,提取交通指示标志边缘信息,本文方法提取的边缘信息,可清晰描绘交通指示标志的边缘几何形状信息,很好地保留交通指示标志的边缘信息。实验结果表明,本文方法具备较优的边缘信息提取效果。
以完整率与点云贡献率为评价指标,以文献[8]中的基于多尺度卷积神经网络的道路交通标志识别方法为对比方法,衡量本文方法的边缘信息提取效果,其计算过程如下
(9)
完整率代表边缘信息提取的完整性,计算提取到的边缘信息量m′和道路交通环境原本所具有的边缘信息量m的比值,其值越接近100%,边缘信息提取的完整性越佳;点云贡献率代表边缘信息提取的有效程度,计算提取到的边缘信息量中的有效信息量m0′与道路交通环境原本所具有的边缘信息量m的比值,其值越接近1,边缘信息提取的有效程度越高。分析本文方法和文献[8]方法在雾天与雨天条件下,提取不同类型交通指示标志边缘信息时的完整率与点云贡献率,分析结果如表1所示。

表1 边缘信息提取的完整率与点云贡献率分析结果 单位:%
由表1可知,在不同天气条件下,本文方法提取各类型交通指示标志边缘信息的完整率均较高,最低完整率为96.4%;点云贡献率也均与1较为接近,最低点云贡献率是0.96%。而文献[8]方法得到的最低完整率为95.2%,点云贡献率也与1较为接近,但相比本文方法还是较低,最低点云贡献率是0.95%。说明在不同天气条件下,不同交通指示标志类型时,本文方法提取边缘信息的完整率与点云贡献率均较高,即边缘信息提取完整性较优,边缘信息提取的有效程度较高。
利用本文方法根据提取的交通指示标志边缘信息,进行交通指示标志检测,交通指示标志检测结果如图5所示。

图5 交通指示标志检测结果
根据图5可知,本文方法可有效检测交通指示标志,根据检测结果得知,该部分道路交通环境中的交通指示标志为分向行驶车道,其作用为指示驾驶员前方可分向行驶,驾驶员可根据分向行驶方向,及时变更车道,决定需要行驶的道路,降低安全事故发生概率。
利用一个用来评价二分类模型优劣的常用指标AUC面积衡量本文方法道路交通指示标志的检测效果,即坐标图中曲线下与坐标轴围成的面积,AUC面积与1越接近,说明本文方法的检测精度越高,在不同光照情况下,本文方法道路交通指示标志检测的AUC值分析结果如图6所示。

图6 不同光照条件下的检测精度分析结果
由图6可知,在不同光照条件下,本文方法检测道路交通指示标志的AUC值,均与1较为接近,说明不同光照条件,对本文方法的影响非常小,原因是本文方法利用车载点云数据进行道路交通指示标志检测,车载点云数据不受光照与天气等因素影响。实验证明:在不同光照条件下,本文方法均可精准检测道路交通指示标志。
3 结束语
随着政府高效管理与社会经济发展对地理空间数据越来越高的要求,测绘新技术以智能化测绘等相关概念与实践不断发展与成熟。智能化测绘在数据采集内容与信息提取方法上仍然有较大的完善空间,全面反映物理世界的瞬时变化。为进一步探索新型测绘在空间数据采集与地物信息提取中的应用,本文研究并提出了基于车载点云数据的道路交通指示标志检测方法,依据车载点云数据不受光照与天气等因素影响的优势,提升道路交通指示标签检测精度,为促进交通指示标志检测方法在实际生活中广泛应用提供帮助。