空间目标激光测距轨道预报研究
2023-03-09罗青山钟亚雪张阿丽安学聪徐玉睿姚运生
罗青山 钟亚雪 王 勇 张阿丽 安学聪 徐玉睿 姚运生
(1.防灾科技学院,河北 廊坊,065201;2.河北省地震灾害仪器与监测技术重点实验室,河北 廊坊,065201;3.中国科学院新疆天文台 光学天文与技术应用研究室,新疆 乌鲁木齐,830011)
0 引言
空间目标激光测距技术是一项利用脉冲激光来精密测量地面观测站到空间目标精确距离的观测技术。空间目标激光测距技术与甚长基线干涉测量技术、全球卫星导航技术共同组成空间大地测量三大高精度测量技术,且为单点定位技术中精度最高的一种,因此在卫星轨道标校、时间传递、星地激光通信等领域有广泛的应用[1-3]。
空间目标激光测距技术是一种主动式的定位测量技术,其工作流程是:首先,要根据空间目标的星历参数,计算出空间目标经过地面观测站的测站预报,并根据该预报来实现地面观测站对空间目标的自动追踪;其次,在对空间目标进行同步追踪的过程中发射脉冲激光,并接收从空间目标反射回来的激光信号;最后,根据测量激光的发送时刻和激光脉冲往回时刻,精确获得地面观测站至空间目标的距离[4-8]。因此,获得空间目标的测站预报,是空间激光测距技术实施过程中的第一步,直接决定地面观测站能否对空间目标实施有效的追踪。
本文设计了一款基于跨平台的C++图形用户界面应用程序开发框架_QT的空间目标激光测距测站预报软件,该软件以北美防空司令部提供的两行轨道根数为基础,通过轨道外推算法计算出空间目标在地心惯性坐标系下的坐标。再通过空间目标、地心和观测站三者之间进行多次坐标转换,计算出空间目标相对观测站的俯仰角和方位角,最后绘制地面测站预报图。为了验证软件的有效性,本文以我国自主研制的北斗导航卫星为例来验证软件的实用性。
1 空间目标轨道预报原理
卫星激光测距需要地面观测站不断地接收卫星回波数据来测得地面观测站与卫星之间的距离,所以在对空间目标进行轨道预报时,需要根据卫星位置实时计算卫星相对观测站的方位角和仰角,以便地面卫星激光测距仪调整角度对卫星进行同步跟踪。空间目标轨道预报主要通过两行轨道根数,轨道外推算法来获得空间目标的位置,之后通过坐标转换,最后根据几何关系计算空间目标相对观测站的方位角及仰角[9-10]。轨道预报流程如图1所示。
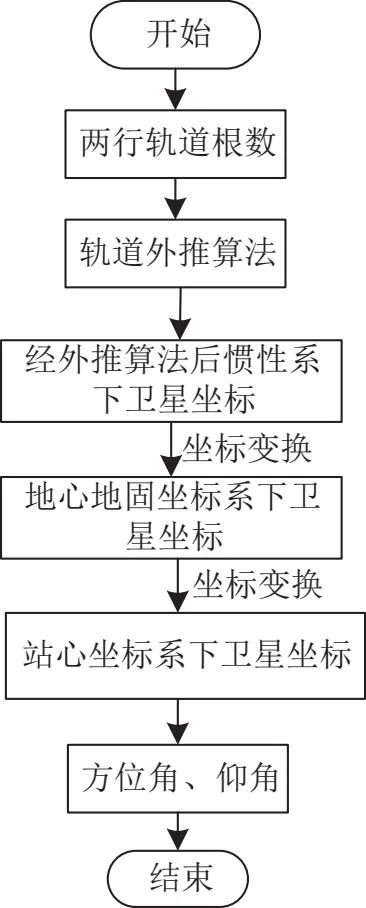
图1 轨道预报流程图
1.1 两行星历和轨道外推算法
两行星历是由两行轨道数据组成[11],两行星历的样例格式如表1所示。两行星历是用于描述卫星位置和速度的表达式。根据两行星历中的开普勒六根数来计算空间目标的时间、坐标、方位、速度等各项参数。然后再通过参数中的速度和位置来作为轨道外推算法中初始的速度和位置。最后,通过数值积分预报下一时刻的速度和位置。其中数值积分主要是对卫星加速度分别进行一次积分和二次积分求得卫星的速度和位置,在求解运动方程时采用较广泛的龙格库塔法进行计算[12-14]。
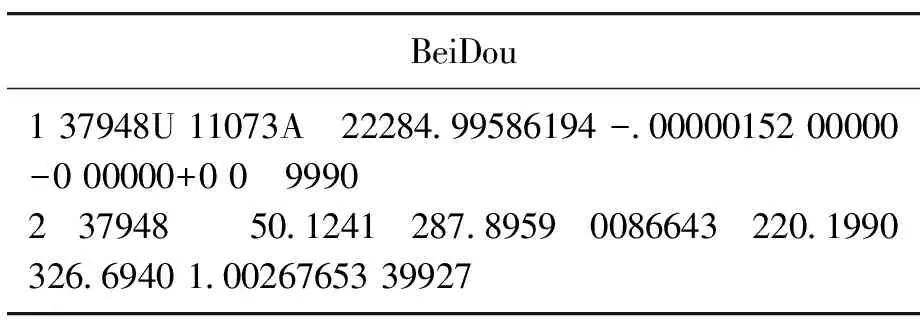
表1 北斗卫星两行星历
1.2 坐标变换
观测站对空间目标的轨道预报,需要求出空间目标相对观测站的位置。而运用的轨道外推算法中运动积分是建立在惯性坐标系下,所考虑的地球引力位函数以及大气阻力摄动是建立在地心直角坐标系下,以及最后所求卫星相对观测站的位置是建立在站心坐标系下。因此,需要多次进行坐标转换,将惯性坐标系转换为地心直角坐标系,最后转换为站心坐标系。以O为原点分别以Xe、Ye、Ze为坐标轴建立地心直角坐标系[15-16]。以坐标原点N建立站心坐标系,基本平面为当地地平面(X-Y平面),由站心指向正北方向为主方向。X轴在基本平面内指向东方,Y轴指向主方向,Z轴与基本平面垂直指向上方[17]。方位角A由主方向顺时针至卫星位置P在基本平面内的投影S,仰角E为卫星位置P与基本平面的夹角,如图2所示。(x,y,z)为卫星在站心坐标系下的坐标,(X,Y,Z)为卫星在地心直角坐标系下的坐标,(Xp,Yp,Zp)为测站原点在地心直角坐标系下的坐标。
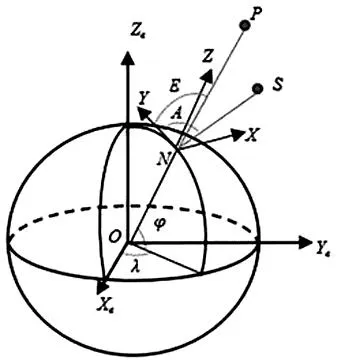
图2 坐标关系图
1)计算卫星的地心直角坐标(Xp,Yp,Zp)。根据轨道外推算法得到的惯性坐标系,之后再通过岁差和章动改正,以及地球自转改正,极移改正,最后转化为地心直角坐标[18-20]。
2)计算卫星的站心坐标 (x,y,z)。通过几何关系,地心直角坐标系与站心坐标系的转换关系为[21]
(1)
其中,
λ和φ分别表示经度和纬度。

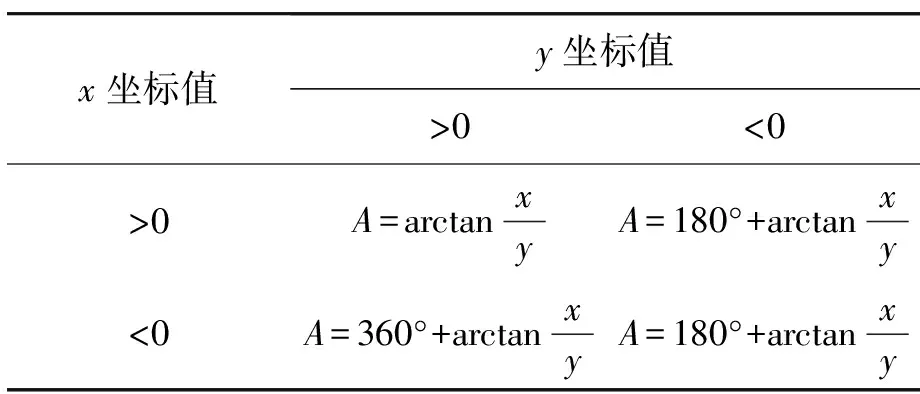
表2 A的数值 单位:(°)
(2)
2 基于QT的轨道预报软件
QT是一个跨平台的C++图形用户界面应用程序开发框架,可用于开发GUI(图形用户界面)程序,也可用于如控制台工具和服务器等非GUI程序,可跨不同桌面和嵌入式操作系统。轨道预报软件主要是利用QT的GUI库,来开发图形界面应用程序,编写实现各种功能,具有较强的跨平台特性。
本软件以QT作为开发环境,采用模块化设计思想进行相关功能的开发,完成了空间目标激光测距轨道预报软件程序。该轨道预报软件分为三部分。星历的获取和数据的处理,以及图像的可视化展示。利用所设计的轨道预报软件,以北斗卫星为例,画出轨道预报图。预测时间段为2022-10-11 UTC 23:50:07—2022-10-12 UTC 23:50:07,每隔1 min,地面观测站参数为新疆南山地面站的经纬度和高程(23°28′10″N,87°10′40″E,2 080 m),俯仰角范围为15°~90°。先导入北斗卫星两行星历,之后计算出卫星在WGS84坐标系中的卫星位置和速度,再计算出北斗卫星24小时1 440个数据的方位角和仰角,最后绘制出新疆南山地面站的轨道预报图。
2.1 星历获取模块
星历获取模块是对两行星历的获取。两行星历可文件导入,手动输入,搜索卫星等三种方式获取,界面如图3所示。本文所获取的北斗两行星历如表1所示。
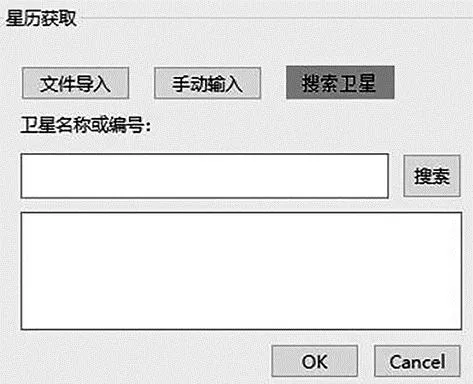
图3 星历获取模块
2.2 数据处理模块
数据处理模块是将两行星历进行数据处理,两行星历经过轨道外推算法与坐标转换,即得方位角和仰角数据。数据处理界面总共分为参数输入、数据输入、图表区这三部分,界面如图4所示。参数输入是对地面观测站位置(经纬度和高程)和预报时段(终止时间,时间间隔),以及俯仰角范围进行设置,其中起止时间是由选取的两行星历所决定的,是两行星历中部分数据转化为年月日;数据显示是在预测时间段内对卫星的方位角和仰角数据进行展示;图像区是根据所显示的方位角和仰角数据,绘制出极坐标图。图5表示的是北斗卫星地心直角坐标系下的数据曲线图,由图5可知,北斗卫星在地心直角坐标系下整体运动轨迹为椭圆形,所得的图形与实际卫星围绕地球的运动轨迹是相同的。

图4 数据处理界面

图5 地心直角坐标系轨道数据
2.3 图形展示模块
图形展示模块是将卫星相对观测站的方位角和仰角进行可视化展示。对预测时段的起始时间和终止时间以及新疆南山地面站的经纬度和高程进行输入,之后设置俯仰角的范围,得出北斗卫星轨道预报图。图6为北斗卫星轨道示意图,看出北斗卫星相对地面观测站的位置。图7为自研程序所绘出的北斗轨道预报图,同心圆系列表示仰角(由外向里0~90°,间隔为15°),最外圈表示方位角(0~360°,间隔45°),图7中黑色曲线是北斗卫星的轨道预报图。图8是由STK得出的数据所绘制的极坐标图,其中同心圆系列和最外圈表示含义和自研程序所表示含义相同。具体地,图7中的黑色曲线和图8中红色曲线都表示北斗卫星在地面观测站的站心坐标系中的位置和运行轨迹。通过对图7与图8比较可知,在设置相同参数下,两个星历预报图整体是相同的。
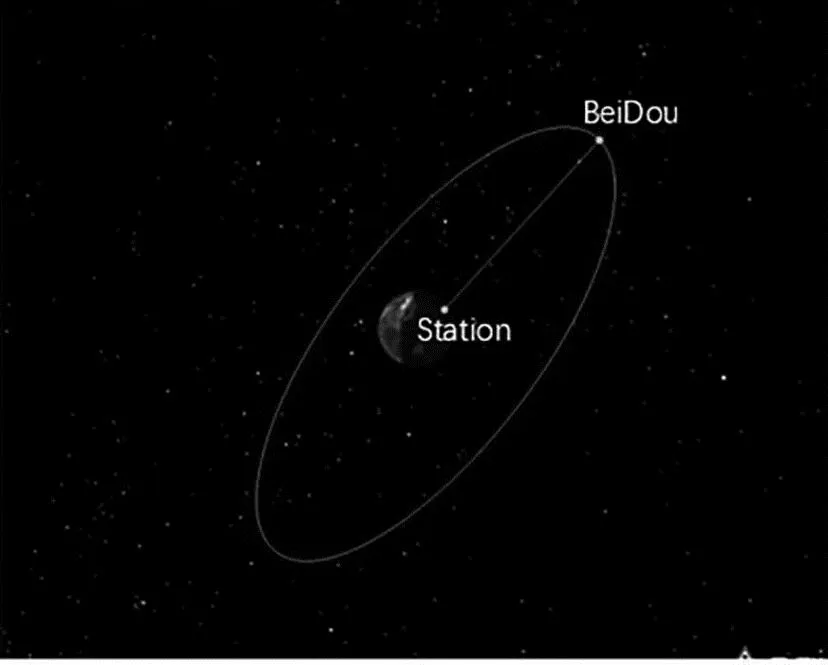
图6 北斗卫星轨道示意图

图7 自研程序星历预报图
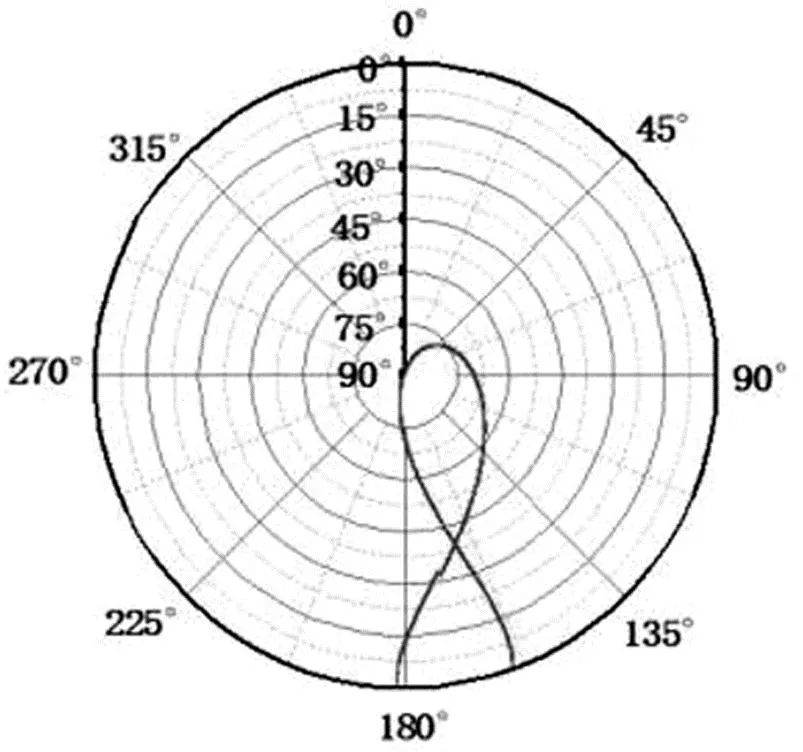
图8 由STK数据所绘制的极坐标图
3 结束语
空间目标激光测距技术是目前空间大地测量技术中精度最高的一种,地面观测站对空间目标的测站轨道预报是空间目标激光测距技术中必不可少的一个环节。本文从空间目标激光测距技术测站轨道预报需求出发,设计了一款基于QT的空间目标激光测距测站预报软件。该软件通过模块化的设计进行功能性开发,可以对观测站进行预报,卫星位置图像展示,详细地计算出方位角、仰角数据,并且能通过极坐标图将方位角、仰角进行表示。该软件设计界面直观,参数设置方便,过程简便,运行稳定。该软件能够为地面观测站捕获空间目标,并同步跟踪其轨道运行提供测站预报服务。