无人机航测技术在高速公路勘察中的应用分析
2023-03-09杨师章
杨师章
长沙核工业工程勘察院有限公司 湖南 长沙 410000
引言
无人机航空摄影测量技术是目前全球测绘领域新兴的一门技术手段,其原理是将多个传感器搭载在同一架飞行平台上,对地物从多个角度进行拍摄,获取到更全面和完整的地物信息。无人机航测中的三维数据可以真实地反映地物的具体位置、高度和外观情况等属性,很好地弥补了传统测量手段的不足。
1 高速公路勘察技术发展概述
公路是基本的交通要素之一,公路网络是其他交通方式的重要连接纽带。依据《国家公路网规划(2013-2030年)》,国家公路网规划总规模40.1万km,其中国家高速公路网规模11.8万km,由7条首都放射线、11条北南纵线、18条东西横线及地区环线、并行线、联络线等组成,并另规划远期展望线约1.8万km。我国公路建设任务仍十分繁重,新建高等级公路重点已转移至地形地质条件复杂的中西部地区。这些地方地形地貌条件恶劣,植被往往十分茂盛,如何快速高效地获取公路工程所需的高精度空间信息,成为当今研究的热点问题[1]。
传统的高速公路勘察主要采用航空摄影测量辅之以GPSRTK测量、水准测量的方式,这种方式由于外业工作量大、效率低、数据信息不完整等缺点,随着无人机航测技术的发展,其具有高效率、高精度、低成本、不受地形条件的限制等优点,逐渐在高速公路勘察领域获得推广应用[2]。
2 无人机航测技术基本作业流程与应用要点
2.1 作业流程
无人机航测作业流程如下图1所示,接收到航测任务后,首先根据任务需要进行测区已有资料的收集,并制订航飞方案,向空管部门申请航飞空域。无人机飞手作业前需要现场踏勘,了解测区实际情况后,进一步优化作业方案,进行测区分区和航线设计。无人机起飞前,需要进行严格的飞前检查后才可进行起飞作业实施。航飞摄影结束后及时对采集数据进行检查。最后进行内业数据处理和航测任务所需格式数据生产[3]。
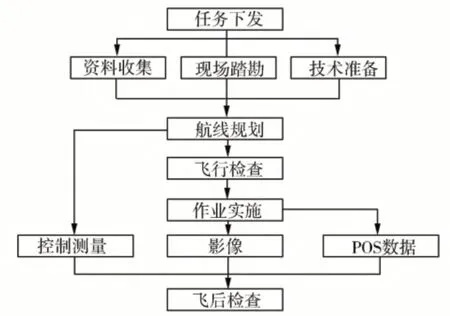
图1 无人机航测作业流程
2.2 应用要点
2.2.1 资料收集。航测区域资料收集应包括该区域已有各种比例尺地形图、控制点数据或影像资料,如需使用谷歌地图等线上地图,也应提前下载。无人机航测作业人员需要做到充分了解飞行区域地物地貌,需要提前收集该地区气象情况以及作业计划日期的天气预报情况,还需要检查航测区域起降条件来提前选择适合的飞行器,注意检查附近特殊设施等情况,最后还需要研究测区是否有禁飞区域,如果有则提前和相关管理部门申请[4]。
2.2.2 作业实施。仔细检查无人机系统设备,保证无人机各功能能正常使用,各系统工作状态正常,如果需要人为协助无人机起飞,则安装起飞装置;无人机组装好后,需再次进行安全检查,重点注意磁罗盘是否处于正确位置,以及检查无人机陀螺仪是否正常工作。无人机检验合格后,还需对任务载荷设备进行检查,需检查相机内存是否足够,并提前进行试拍,将相机焦距、曝光时间、亮度调整好之后装入无人机。将无人机与地面站软件进行连接,启动地面站开启定位,依据航线设计设置飞行路线,并上传至无人机。一切检查合格后,起飞无人机,通过地面站软件的监视界面认真观察无人机飞行姿态和现行位置是否正常,实时监视剩余油量或电池电量。
2.2.3 飞后检查。无人机飞行完毕后,作业人员回收飞行器并检查无人机机体完好程度,查看无人机飞行数据,检查飞行质量是否符合相关标准。如果图像出现绝对和相对漏洞,需采用同一架次的任务设备进行及时补测。影像质量的检查要求拍摄的影像必须要足够清晰,具有丰富的层次、适中的图像的反差、较柔和的色调。云、影、烟等缺陷不允许出现在影像当中[5]。
4 实例分析无人机航测技术在高速公路勘察中的应用
4.1 工程概况
本项目全长8.203km(均为新建),路幅宽度23m,双向四车道,设计速度60km/h。测区以山地地形为主,平均海拔为600m,河流横穿测区,局部区域落差较大。测区植被茂盛,多为常绿阔叶林及低矮灌木。
4.2 无人机航测技术
4.2.1 设备选择。本项目选用ARS-200系统旋翼无人机LiDAR三维激光扫描系统,见图2。该系统最大测量距离为330.00m,测距精度15mm,最大有效点频10万点/s,位置精度平面0.01m,高程0.02m,俯仰、翻滚角标称测量精度为0.005°,航偏角为0.012°。公路勘测项目测区主要为带状地形,具有长度长,宽度窄的特点,因此只需要往返一条航带即可完成。

图2 ARS-200无人机LiDAR系统
4.2.2 航测参数。根据项目要求,需采集设计线位中线两侧各约100m范围内的数据。航线规划从高效、经济的原则出发,综合考虑仪器设备的性能、地形、地势、高差、摄区形状、航高、航向重叠度、旁向重叠度、激光点云密度、GSD等因素,无人机LiDAR航测基本参数,见表1。
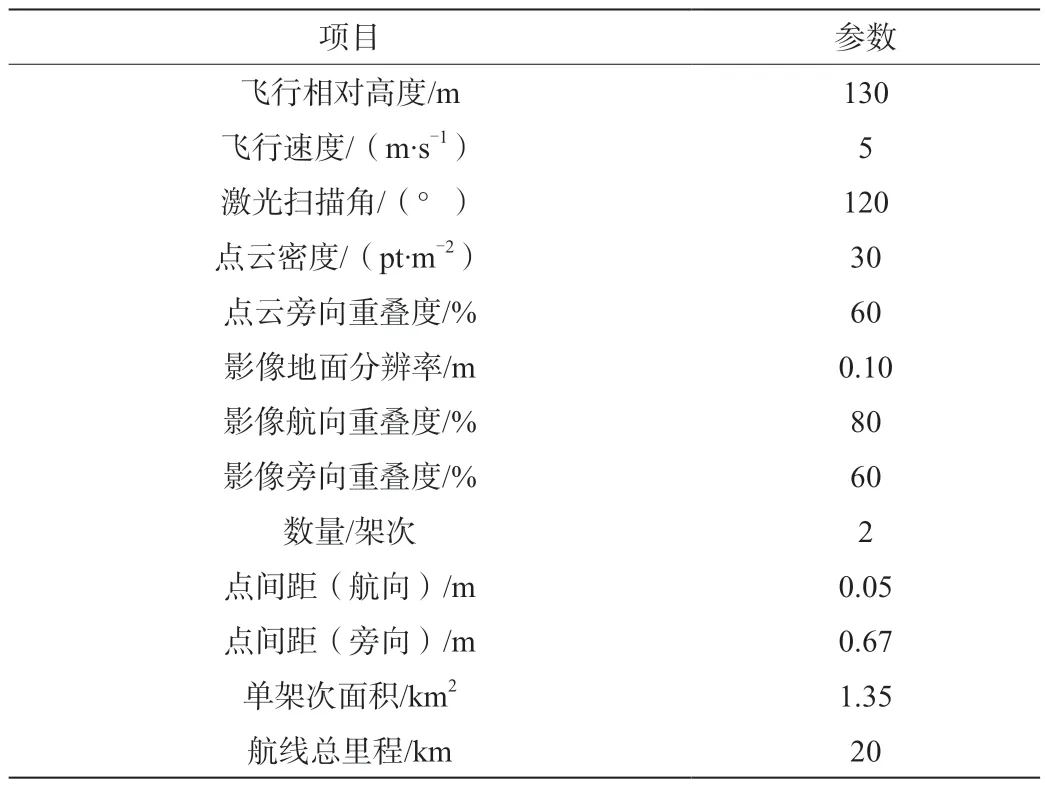
表1 无人机LiDAR航测基本参数
4.2.3 航测实施。根据路线走向分为2个架次,每个架次约4~5km,架次之间保证一定的重叠,全线预设一个起飞场。当相对航高为130.0m时,能保证航线下方最低处的点云密度优于30个/m2,同时影像地面分辨率为0.1m,满足项目的技术要求。地面基站采用双站模式,采用海星达iRtk2双频接收机选择测区附近两个首级控制点(四等平面/四等高程)架设地面基站,采样间隔设置为1秒。
4.2.4 精度分析。为分析和评价无人机 LiDAR 激光点云的成果精度,项目全线布设了2430个高程检查点,采用GPS-RTK方式测量其平面和高程坐标。检查点与激光点云吻合情况,见图3,红色为实测检查点,可发现激光点云与实测的检查点吻合非常好。为了对激光点云精度进行定量评价,利用2430个检查点平面坐标通过激光点云内插高程与实测高程进行比较,最大高程误差0.395m,最小高程误差-0.388m,中误差0.110m,误差均值为-0.050m。
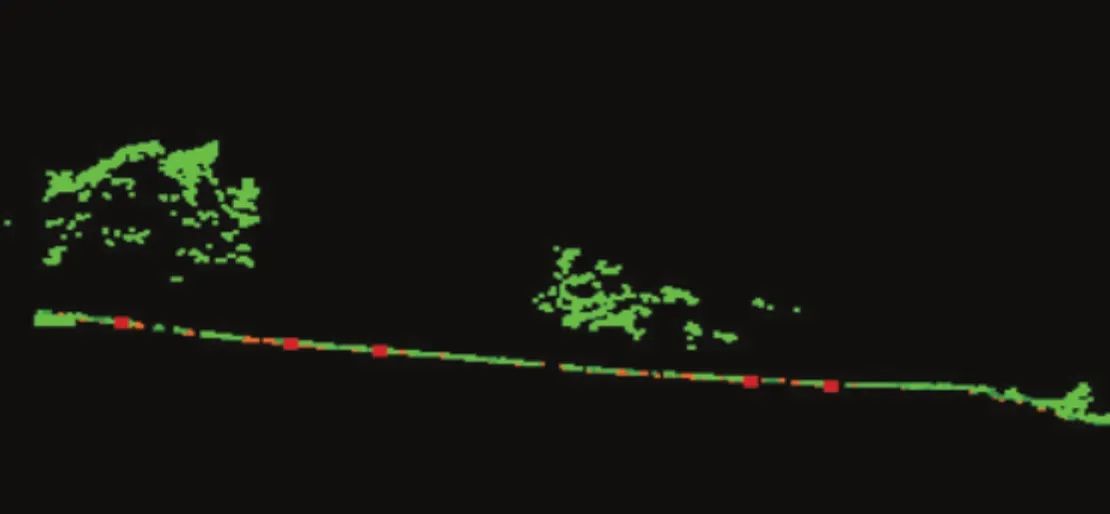
图3 检查点与激光点云吻合情况
将人工实测的482个横断面数据与激光数据进行比对。某实测横断面与激光点云的比对,见图4。激光点云不仅与实测横断面吻合得非常好,而且激光点云可以穿透茂密的植被,对地形细节的表达更加精确,可以快速、高效地生成设计人员所需的横断面数据,用于路线方案的设计与优化。
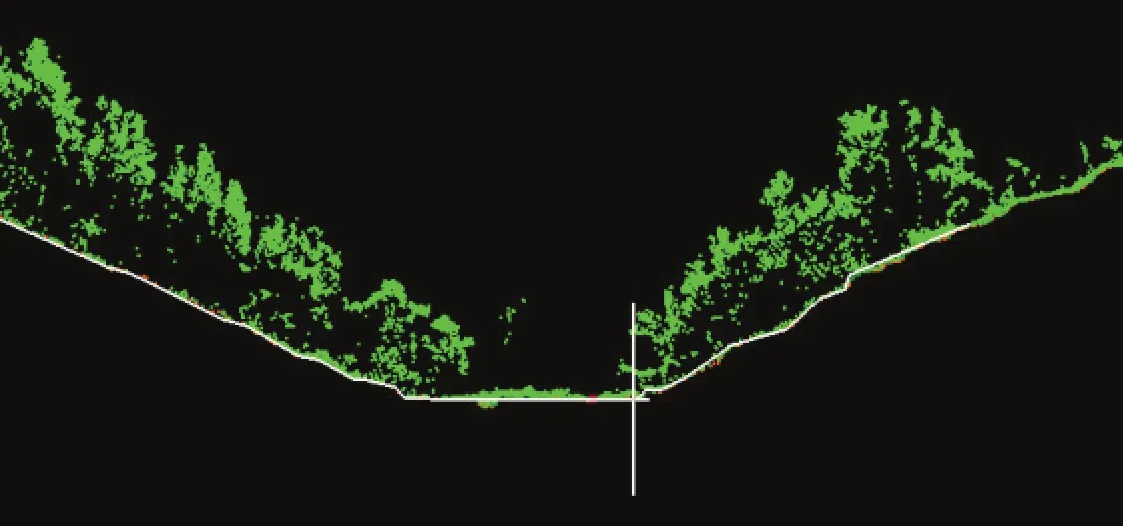
图4 实测横断面与激光点云比对
5 结束语
综上所述,勘察工作是高速公路工程建设的重要内容之一,但是传统方法存在成本高、效率低等问题,无法满足当前高速公路建设实际需要,对此必须引进新的勘察技术。无人机航测技术为高速公路工程勘察变革提供机遇,其不仅提高了勘察效率,满足公路实际勘察需求要求,更是提升了勘察工作的智能化水平。目前无人机航测技术在公路工程建设方面的运用还不够深入,还需进一步加强软硬件方面的研究,不断提升续航能力与影像精度,为高速公路勘察水平的提升奠定基础。
