Visual Feedback Disturbance Rejection Control for an Amphibious Bionic Stingray Under Actuator Saturation
2023-03-09HaiyanChengBinFangQingLiuJinhuaZhangandJunHong
Haiyan Cheng,Bin Fang,Qing Liu,Jinhua Zhang,and Jun Hong
Dear Editor,
This letter is concerned with visual feedback disturbance rejection control for an amphibious bionic stingray subject to actuator saturation with internal and external disturbances.A visual feedback control method is designed for a dynamic nonlinear system on yaw angle of the amphibious bionic stingray via a finite-time extended-state observer,which is proved to achieve finite-time stability via a Lyapunov method.Finally,simulation results verify the effectiveness on the visual feedback control method.
With the development of science and technology,various unmanned equipment are widely used and developed in military,civil and other fields [1].Many underwater or surface unmanned vehicles are developed to show important application prospects in marine monitoring,logistics support,marine agriculture,[2] and [3],etc.Many researchers draw inspiration from natural biological fish for developing variety of bionic autonomous surface or underwater vehicles,such as bionic tuna [4],bionic manta ray [5],etc.We also designed and produced an amphibious bionic stingray in [6] based on fluid structure interaction simulation results.Like most surface or underwater vehicles,realizations of expectation control in complex and uncertain dynamic environment is an important premise for its practical applications [7].
To realize precise control of controlled plant,disturbance-rejection control methods are adopted by many researchers to deal with uncertain dynamic environment or imprecise system model [8].Among the existing disturbance-rejection control methods,extended-state observer-based control is one to estimating both total disturbances and unknown system states with the least information on the controlled plant [9].Extended-state-observer is proposed by Han [10],which is successfully applied in bionic caudal fin [11],autonomous surface vehicle [12] and so on.A major difference between these control methods is that different proofs and designs for extended state-observers.Furthermore,collection,feedback and processing of visual information provides a convenient way to realize some autonomous motion controls for bionic autonomous surface or underwater vehicles [13].Moreover,actuator saturation is an important consideration in robot control system[14].Therefore,it is interesting and challenging to design an appropriate method for realizing visual feedback control using extended-state-observer for the designed amphibious bionic stingray subject to actuator saturation.
Consider above descriptions,this letter mainly focuses on modeling,control method design,stability analysis and simulation verification for the amphibious bionic stingray.The main contribution of this letter are outlined as: 1) An amphibious bionic stingray is introduced and a dynamic system on yaw angle is established.2) A finite time extended-state-observer proved by Lyapunov method is designed to estimate total disturbances in the dynamic system.3)Controller integrated error feedback and disturbance rejection compensation is designed and analyzed under actuator saturation restriction.
Bionic stingray modeling:According to biological observations and fluid-structure interaction simulation studies,an amphibious bionic stingray is designed and fabricated in [6],which is shown in Fig.1 with main structural components.Through the innovative design of screw-type drive shafts,array-type fin surfaces can realize undulating bionic motion on stingray under driving actions of micro motors.Using the visual module integrated in the amphibious bionic stingray front-end,visual feedback motion control can be achieved by communication and control module.

Fig.1.Amphibious bionic stingray with main structural components.
The amphibious bionic stingray can be used as surface or underwater vehicles by different balance of gravity and buoyancy.Rectilinear and rotary motions can be realized by adjusting speed and steering of two micro motors.It is worth noting that athletic abilities of the amphibious bionic stingray is limited by its actuator,it takes 2.8 s for the amphibious bionic stingray to complete 90° rotation.Moreover,tracking control schematic diagram is depicted in Fig.1 for yaw angle between a specific target and the amphibious bionic stingray.In this letter,only tracking control of yaw angle is considered temporarily for the amphibious bionic stingray,which is expressed as the following dynamic model:
wheremθis the mass containing hydrodynamic mass,θ(t) is the yaw angle,ω (t) is the yaw angular speed,Tn(t) is used to indicate unmodeled dynamics,Td(t) represents the external disturbances,Tu(t) is the control input which can be adjusted by speed difference of two micro motors for the amphibious bionic stingray.LettingTu/mθ=gu(t),whereu(t) is the voltage signal difference between two driving motors,which realizes different motor speeds to achieve yaw motion for the amphibious bionic stingray,gis the gain onu(t).Then,the dynamic model (1) is further written as below:
Control method:A schematic diagram is shown in Fig.2 for the control method proposed in this letter,which is mainly composed of a yaw angle image recognition algorithm,a finite-time extendedstate-observer and a error feedback controller under actuator saturation.Using the visual module shown in Fig.1,the yaw angle can be obtained for the amphibious bionic stingray by digital image processing technology,and its solution process is displayed in Algorithm1.

Fig.2.Schematic diagramon visual feedback control method.

As shown in the yaw angle calculation diagram in Fig.2,θd(tk) is the yaw angle calculated from image frame
where ϵ is the distance between the center of gravity on target and the center in the current image frame,εis the half length of image frame,φthe fixed viewing angle of the visual module.Considering the lack of image,calculation time and other problems during image recognition,the value of θd(tk) cannot be obtained continuously or has a longer time interval.By a tracking differentiator designed in[10],a continuous yaw angle tracking trajectory can be obtained as
For yaw angle tracking control of the amphibious bionic stingray,both desired angle and angular velocity are 0,on basis of the finite time extended-state-observer (5),a tracking error feedback controller is designed under actuator saturation as follows:
Stability analysis:Two theorems are derived to prove the stability of the dynamic systems (2) under the proposed control method of this letter.For obtaining stability results,a lemma is reviewed first.
Theorem1: For the observation error system(7),if there are adjustable parameters α1>0, α2>0 and α3>∆1in the finite-time extended-state-observer (5),then the observation errorE(t) converge to null matrix in finite-time.
Proof: A function satisfying the Lyapunov conditions is constructed for the observation error system(6) as follow s:
taking derivative of the Lyapunov function (10),one has that
whereD=diag{ α1, α2, α3}.According to the finite-time stability theory as in [17],convergence time is satisfied with the following inequality for the finite-time extended-state-observer (5):
whereVe(t0)represents the initial time of the functionV e(t),which is related to the initialvalue of the observation errors.
According to the theorem condition (15) and the Lemma 1,the following inequality hold on:
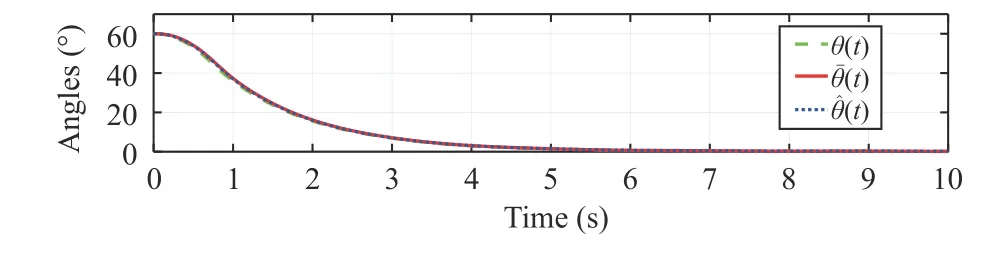
Fig.3.Yaw angle simulation of the amphibious bionic stingray.
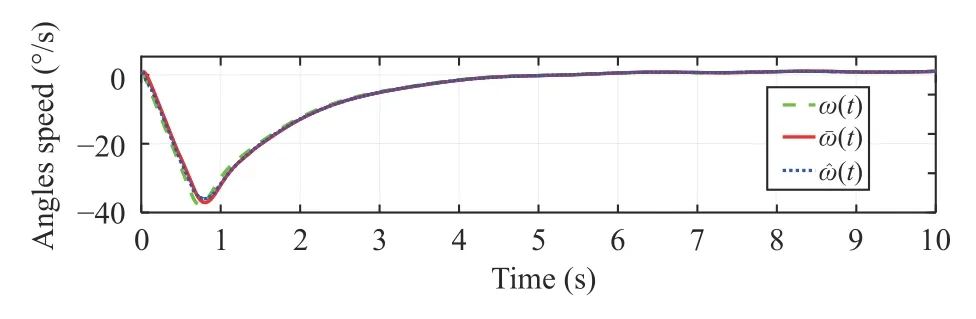
Fig.4.Yaw angular speed simulation of the amphibious bionic stingray.
Remark 1: In this letter,limited by physical conditions of our laboratory and amphibious bionic stingray prototype,effectiveness of the proposed control method can only be verified by simulation at present.In the future,physical visual feedback control experiment will be considered to implement for the amphibious bionic stingray.
Remark 2: In this letter,a sinusoidal function is used to set as the total disturbances in the simulation.Because the total disturbances of the amphibious bionic stingray in actual motion control is complex and unknown,some functions are usually selected to represent the total disturbances in simulations for verifying the possibility of control methods such as sinusoidal function [8],[11].
Conclusion:In this letter,modeling,control method design,stability analysis and simulation verification have been carried out for an amphibious bionic stingray.The control method includes a yaw angle image recognition algorithm,a finite-time extended-state-observer and a feedback controller under actuator saturation,and its stability has been proved via Lyapunov techniques.
Acknowledgments:This work was supported by the National Natural Science Foundation of China (52175030).
杂志排行
IEEE/CAA Journal of Automatica Sinica的其它文章
- The Distribution of Zeros of Quasi-Polynomials
- Straight-Path Following and Formation Control of USVs Using Distributed Deep Reinforcement Learning and Adaptive Neural Network
- Prescribed-Time Stabilization of Singularly Perturbed Systems
- Optimal Formation Control for Second-Order Multi-Agent Systems With Obstacle Avoidance
- Dynamic Target Enclosing Control Scheme for Multi-Agent Systems via a Signed Graph-Based Approach
- CoRE: Constrained Robustness Evaluation of Machine Learning-Based Stability Assessment for Power Systems