基于电池实时电量的无人机电池分配策略
2023-03-09广东电网有限责任公司东莞供电局郑安然周智明陈志明田旦瑜陈庚罗艾珂
广东电网有限责任公司东莞供电局 郑安然 周智明 陈志明 田旦瑜 陈庚 罗艾珂
1 引言
目前无人机已在电力行业内广泛应用,工作人员在后台机下达巡视任务后,无人机与机巢配合就可以自动完成包含充电、起飞、巡视、降落全过程[1-2]。无人机机巢是无人机远程精准起降平台,即自动储存无人机,自动拆装电池,自动完成电池充电等功能,同时与无人机后台机互通实现数据互联。每次巡视任务开始前机巢中的机械臂会从电池充电位抓取电池装入无人机[3],然而每次装设电池后都需要工作人员人工判别电池电量是否满足本次巡视任务要求,当电池电量不足时人工下达更换电池指令,电池的反复拆装不仅消耗大量时间,并且人工判别电池电量也引入人工干预,制约无人机巡视向全自动的方向发展。因此研究一种自动的无人机电池分配策略具有重要意义。
2 目前的无人机电池装配方法
以广东电网有限责任公司东莞供电局松山湖巡维中心使用的无人机机巢为例,机巢的电池装配组件包括机械臂和4个电池充电位(一号位、二号位、三号位、四号位),可同时为4 个无人机电池充电。当工作人员在后台机下达无人机巡视任务后,机巢收到后台机指令,利用PLC 控制机械臂自动给无人机装设电池,然而当前的电池选择与安装存在两个问题,从而导致无人机电池安装后电池电量不满足该巡视任务要求的情况的发生。一是电池安装进无人机之前,无法观察到当前电池的电量,仅在电池安装进无人机后由工作人员后台检查电池电量能否满足该飞行任务,然后在后台机发布更换电池指令,需要工作人员人工判断该电池电量。二是机械臂每次只会自动抓取一号位的电池,只有当一号位电池安装进无人机并且工作人员在后台机上手动下达“电池拆卸”“电池装载”的指令后,才会拆下电池,抓取二号位的电池,再次安装完毕并人工下达命令后,才会抓取三号位电池,这样会出现轮流装拆完全部4 块电池但均无法满足任务要求的情况,花费大量时间并且巡视任务被迫中止,当前的无人机电池装配方法无法直接抓取电量满足要求的电池,反复拆装电池耽误了大量时间,严重影响无人机全自动化巡视,降低巡视效率。
3 无人机电池自动分配策略
为了解决传统的电池分配方法电池电量不直观、人工干预多的问题,提出一种基于电池实时电量的无人机自动电池分配策略,通过加装电池电量读取模块、优化电池充电配置,在分配电池前自动读取各电池电量,配置更精确的电池耗电量计算方法。基于巡视点位对任务所需电量进行修正,将各电池电量与任务所需电量对比判别,从而使分配的电池电量满足无人机巡视任务要求。无人机控制界面上的“电池装拆”指令按钮如图1所示,无人机电池装配流程如图2所示。
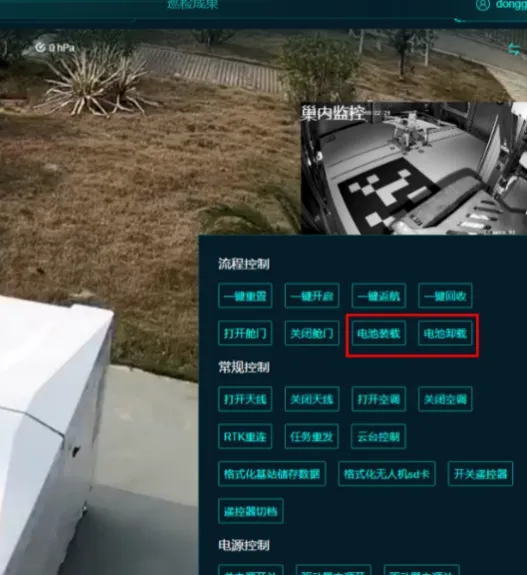
图1 无人机控制界面上的“电池装拆”指令按钮
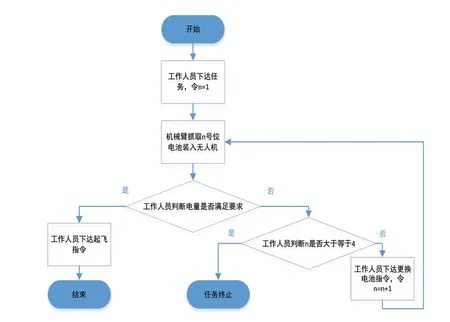
图2 无人机电池装配流程
3.1 配置要求
3.1.1 电量读取模块
新的无人机电池自动分配策略在原有的4 个机巢电池充电位上加装电量读取模块,该模块可读取各个电池的实时电量并回传至后台机,从而可以直接在后台机上基于电池的实时电量判断是否有满足无人机巡视任务需求的电池。
3.1.2 优化电池充电位
新的无人机电池自动分配策略要求机巢机械臂能够方便抓取任意充电位电池。原有的电池位从上到下等距排列,原有的电池充电位排列如图3所示。机械臂方便抓取一、二号位电池,但距离三、四号位行程较远,不便抓取,因此需要对原有的充电位进行改造,改造方法是将一、二号位充电位并列装设在上排,三、四号充电位并列装设在下排,改造后的充电位更加集中,机械臂能够随意抓取任意充电位电池。
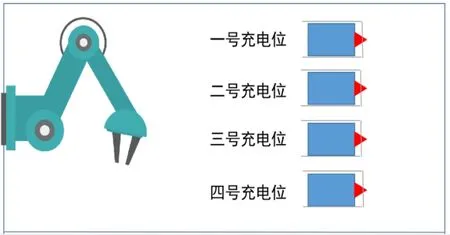
图3 原有的电池充电位排列
3.2 基于巡视点位的电池耗电量修正
传统的无人机巡视任务耗电量由无人机内嵌程序计算,内嵌程序会基于用户要求的飞行距离和飞行速度和当天的气象情况等因素,自动计算无人机飞行耗电量作为无人机巡视任务耗电量。无人机执行巡视任务的耗电量由飞行耗电和巡视点位耗电两部分共同组成,这种巡视任务耗电量计算方法主要考虑的是无人机飞行途中的耗电量。当巡视点位较少时,无人机巡视任务耗电量约等于飞行耗电量,此时计算结果较为准确。当无人机巡视点位较多时,由于需要长时间悬停、对特定点位进行多角度成像并回传图像,会消耗额外电量,使得巡视点位耗电量占比增大,因此传统的电量计算方法算出的电量不准确,甚至会发生很大的偏差,需要对电池耗电量修正。
基于任务点位的电池耗电量修正主要流程包括以下步骤。一是工作人员在无人机后台机下达巡视任务。二是后台机解析该巡视任务包含的巡视点位数量n。三是基于单个巡视点位耗电量q计算总的巡视点位耗电量ΔQ,其中单个巡视点位耗电量q是之前的试验中得到的无人机对于单个巡视点位耗电量最大值。四是基于总的巡视点位耗电量ΔQ对无人机内嵌程序计算的无人机飞行耗电量Qf进行修正。
无人机飞行耗电量Qf、巡视点位耗电量ΔQ以及巡视任务的电池耗电量X 计算公式(1)、(2)、(3)如下:
式中:d 为该任务的距离;v为无人机飞行速度;w为风速;f为无人机飞行耗电函数。
3.3 电池自动分配策略
系统软件部分主要流程包括以下步骤。一是当工作人员在无人机后台机下达巡视任务后,后台机自动计算完成该巡视任务的电池电量X,并留出20%的裕度;如果1.2X 大于等于100%,则令该任务所需电池电量为电池满电(100%);如果1.2X小于100%,则令该任务所需电池电量为1.2X。二是将机巢中当前所有电池的电量从高到低进行排序,对比第1名(若存在多个电池电量相等并列第1的情况,则从中随机选取任意一个)电池电量是否大于该任务所需电池电量。如果第1 名电池电量大于1.2X,则立即执行飞行任务。选取第1 名的电池作为本次任务选定电池,定位电池电量第1 名的电池所在的充电位,后台机给机巢机械臂下达抓取该电池的指令;如果第1 名电池电量小于等于1.2X,则等待用户判别是否执行飞行任务。三是基于该电池当前实时电量与充电功率,计算出该电池电量达到1.2X 所需的时间t,后台弹窗至用户选择界面“当前所有电池均无法满足要求,最快还需要时间t,是否在时间t后电池充电完成后自动开始飞行?”,并提供“是”和“否”两个选择按钮。若工作人员选择“是”,则稍后执行飞行任务。等待时间t后,执行飞行任务。选取第1名的电池作为本次任务选定电池,定位电池电量第1 名的电池所在的充电位,后台机给机巢机械臂下达抓取该电池的指令;若用户选择“否”,则取消本次飞行任务,上述新的无人机电池装配流程如图4所示。
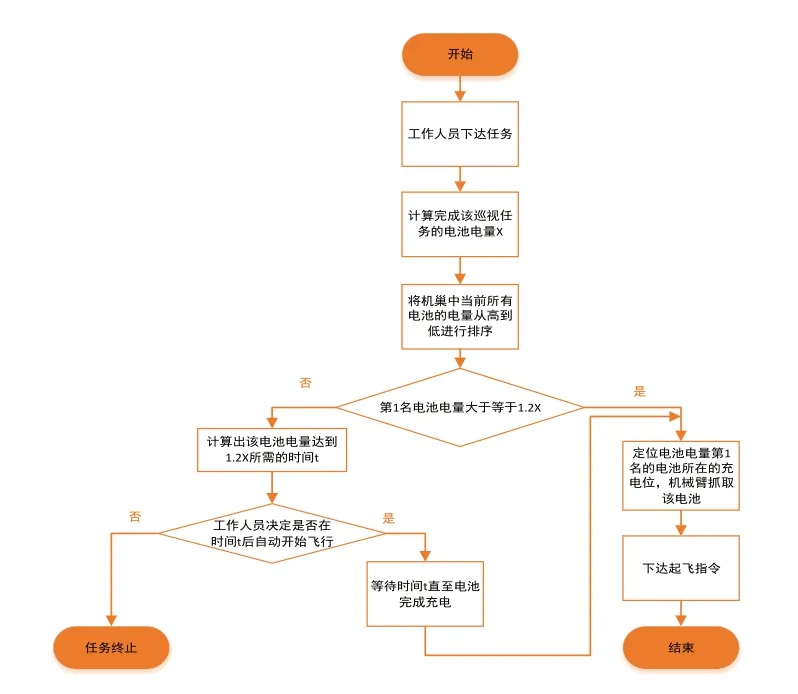
图4 新的无人机电池装配流程
对新电池分配策略与原有电池分配策略的人工干预次数与电池装配时间进行统计与对比,新旧电池分配策略的人工干预次数如表1所示,新旧电池分配策略的电池装配时间如表2所示。由表1与表2可知,采用新策略后人工干预次数及电池装配时间大幅度下降,新策略在4 种电池电量场景下的人工干预次数都为0,综合5种电池电量场景下的平均干预次数降低97%,电池装配时间由原本的1~5min降低至0.5min,平均电池装配时间降低84%,显著缩短电池装配时间,提高无人机的巡视效率。
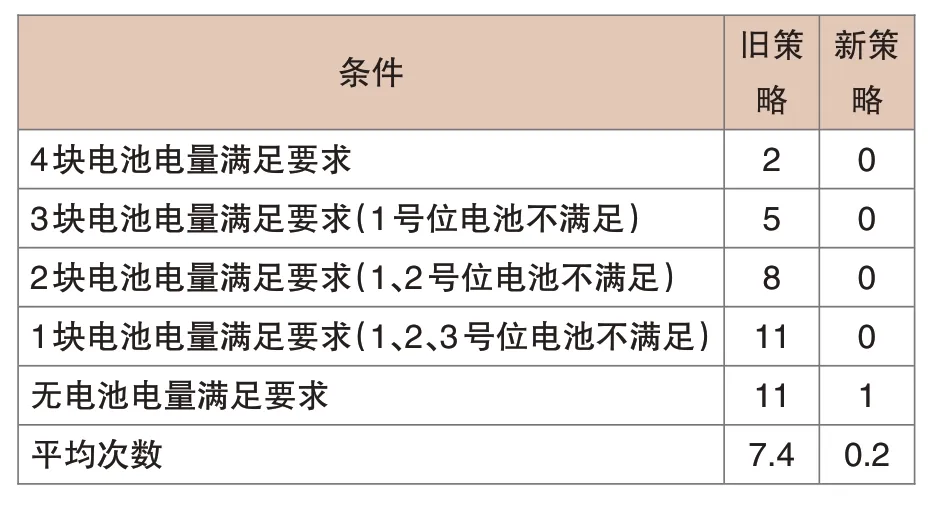
表1 新旧电池分配策略的人工干预次数(单位:次)

表2 新旧电池分配策略的电池装配时间(单位:s)
4 结语
本文提出了一种基于电池实时电量的无人机自动电池分配策略,通过加装电池电量读取模块,在分配电池前读取各电池电量,配置更精确的电池耗电量计算方法,基于巡视点位对任务所需电量进行修正,将各电池电量与任务所需电量进行对比判别,使分配的电池电量满足无人机巡视任务要求。该策略与原有电池分配策略相比人工干预程度大幅度降低,软件自动判别取代人工判断,使得无人机巡视过程时间显著缩短,节约大量巡视时间的同时可以扫除限制无人机巡视全自动的最后一环,有助于无人机巡视在电力行业的深度应用。
