基于改进卷积神经网络的工频水下磁目标探测
2023-03-07文仕强
田 斌,李 俊,杨 超,李 杨,文仕强
(武汉工程大学电气信息学院,湖北 武汉 430205)
0 引言
水下目标探测是海洋开发与海上安全所需的关键技术之一。 水下目标探测的方法有声探测[1-2]、光学成像探测[3]、雷达射频探测[4]以及磁异常探测[2,5]等,其中声探测是目前水下目标探测最主要且最成熟的方法。但随着现代消音技术的发展,海洋环境噪声大幅提高,声探测面临目标辐射噪声与回波强度大幅降低、海洋环境水声效应影响显著等一系列的问题[6],亟需一种辅助或替代方法。由于海洋中异常目标的存在,会产生包括感应电磁场、源电磁场在内的多种物理场[7]。目前尚无可以完全消除目标电磁特性的技术,因此磁探测作为非声探测技术中的一种重要手段在水下目标探测中呈现出越来越广阔的应用前景[8]。
随着深度学习技术的发展,卷积神经网络(convolutional neural network, CNN)也在水下目标检测与识别中广泛应用。基于卷积神经网络的水下目标探测研究多聚焦于水声探测,如用CNN提取舰船辐射噪声信号的LOFAR谱图来实现水下目标探测与高精度识别的方法[9];用更小的卷积核逐点提取水声信号的特征,实现端到端的目标自动识别方法[10-11];通过小波预处理与改进卷积的卷积神经网络实现探测与高准确率识别的水声目标识别方法[12]等。
然而,基于工频磁场与卷积神经网络的水下目标探测仍有两方面难题亟待解决。一方面工频磁场水下目标探测研究尚处于试验阶段,已发表的文献多为软件仿真结果[13-14]。如用基于多特征融合的CNN检测磁异常信号,在低信噪比下仍有良好的检测性能[15];利用迁移学习下的CNN对地磁环境中的水下磁异常仿真信号识别,有较高的识别率[16]。区别于地磁信号,实测工频磁信号受限于自身信号强度低,以及海洋中高动态变换非高斯特性噪声影响,易被淹没,导致特征工程难以开发,磁矢量定位困难。另一方面,水下目标信号数据采集难度大、花费高,难以收集到足量的数据用于模型训练。实测样本数据少,有目标和无目标两类数据结构不平衡造成识别精度低。信号特性与样本数据上的差异,使得现有基于CNN的水下目标探测与分类方法无法直接用于工频磁场水下目标探测。
针对以上问题,本文提出基于深度卷积生成对抗网络(deep convolutional genertive adversarial network, DCGAN)数据增强和DY-CNN模型的工频磁场水下目标探测方法。
1 基于深度学习的工频磁异常探测理论
1.1 工频磁场及探测机理
工频磁场是由交流输变电设施产生的磁场,属于超低频电磁场,其频率为50 Hz,波长6 000 km。世界上采用的高压输电网络一般为三相三线交流输电线,全球电网装机容量巨大。目前为止世界上的电网装机总量达到70亿千瓦以上,我国以及周边国家现有的高压输/变/用电网络能在周边海域产生分布均匀、可探测的工频磁场[6]。水下铁磁性物体会使工频磁场分布发生改变,产生二次感应场的畸变扰动信号,此畸变扰动信号(即磁异常信号)可通过大气、海水等介质进行传播,捕捉该信号可实现水下铁磁性目标的探测。
基于工频磁场的水下磁异常信号属于微弱信号,且易受温度、风速、雷雨等环境因素影响,具有强非线性与非平稳性[17]。工频磁扰动信号具有低信噪比、识别难度大等特点,深度学习理论可以摆脱信号识别中特征提取方法的依赖,极大地降低噪声的影响,因此采用深度学习的识别方法具有重大意义。
1.2 卷积神经网络理论
20世纪80年代,卷积神经网络方法就已经被提出。随着深度学习理论的发展和数值计算设备的改进,卷积神经网络也得到了高速发展,并被广泛应用于各个领域。典型的卷积神经网络结构包含卷积层、池化层、全连接层等。
1) 卷积层
卷积层是卷积神经网络的核心,通过卷积核可以从输入中提取信号特征从而形成特征图像。若卷积层的输入为X,卷积核为k,则单次卷积输出y为

(1)
式(1)中,σ为卷积核大小,l1和l2为卷积核在输入图像上所处的位置,b为偏置项,f为激活函数。
2) 池化层
池化层也称为降采样层,用于在卷积层之后对特征参数进行降维,从而降低神经网络的模型大小和网络参数,提高运算速度。池化层主要的两种方法分别是最大池化(max-pooling)和平均池化(average-pooling)。
3) 全连接层
全连接层的作用是对提取的特征进行非线性组合以得到输出,经过卷积和池化处理后的特征矩阵,采用全连接的方式将图像矩阵排列成一维数组的形式输出,从而完成分类。
2 DCGAN_CNN水下磁异常目标检测方法
区别于传统的磁异常检测通过标量正交基函数检测器用磁梯度信息来进行目标探测与定位的方法[18-19]。本文提出一种基于DCGAN数据增强与CNN分类的检测方法。该方法框架如图1所示,由预处理、数据强化、信号分类三个部分组成。数据预处理将信号从一维时域转化到二维图像;把二维信号图像划分为训练集和测试集;数据强化利用DCGAN的生成器生成数据集中样本较少的目标信号,解决数据集样本不足的问题,即对较少的样本数据进行增强,得到数据量平衡的训练集;信号分类即将原始样本的训练集和经过增强的训练集图像输入到CNN中训练,最终利用经过训练的卷积神经网络模型对测试集进行分类识别。
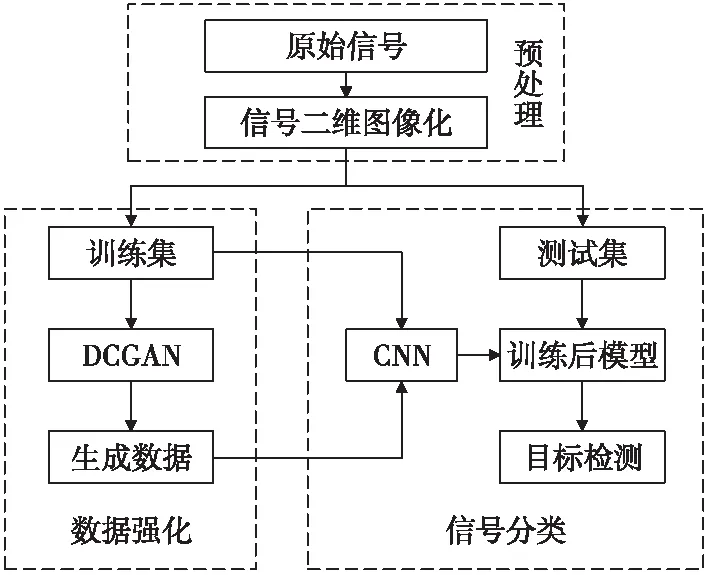
图1 磁异常信号检测方法框架Fig.1 Framework of magnetic anomaly signal detection method
2.1 时域信号的二维转化
本文采用将水下时域信号转换为二维灰度值图片的方法进行特征提取。二维图像是一维数据的同步转换,将时域中的磁场强度、时间变化等信息转化为与其一一对应的像素值,保留了信号的全部特征。二维图像转化过程如图2所示。

图2 时域信号到图像的转化过程Fig.2 Time-domain signal to image transition process
步骤1)窗口截取。利用滑动窗口取值,在含有目标的信号上随机截取,设定截取窗口大小为M,表示每次以M为单位长度进行取值,每次取值完成后,窗口向后滑动N个单位长度,保证N≥M,最后得到M×M大小的图像;
步骤2)信号组合。将步骤1)中的目标信号片段组合,得到一条M×M的信号序列,每条序列的强度为L(k),其中k=1,2,3,…,M×M;
步骤3)图像转化。将步骤2)中的目标信号序列,根据公式转化为灰度图:

(2)
式(2)中,round{·}为取整函数,将转变的图像像素归一化至0~255。
2.2 DCGAN样本增强
本文在已有的实测信号基础上,使用DCGAN生成新的信号样本,作为卷积神经网络的数据支撑。GAN主要包含生成器G与判别器D两个网络结构,通过DCGAN生成样本数据方法如图3所示。

图3 DCGAN模型Fig.3 DCGAN models
DCGAN训练过程如下:
1)构造生成器和判别器,冻结生成器通过损失函数训练判别器网络,更新参数
(3)
θd←θd+η∇Vd(θd),
(4)
式中,η为学习率。
2)冻结判别器,训练生成器
(5)
θg←θg+η∇VG(θg)。
(6)
3) 反复训练生成器和判别器,经过多轮的生成对抗训练,最终达到纳什均衡,生成逼近真实数据的样本。
原始的GAN模型并不稳定,存在梯度消失、模式崩溃等问题,而DCGAN将GAN和CNN相结合,用卷积和去卷积代替池化层,去掉了全连接层,使用了全局池化,并在D网络和G网络中都添加了批标准化(batch normalization,BN)操作,极大地提升了GAN训练的稳定性和输出数据的质量。
2.3 引入动态激活函数建立DY-CNN模型
AlexNet在目标检测、语音识别、图像识别等众多领域都有着出色的表现,随着深度学习的不断拓展,AlexNet也成为众多学者首选的神经网络模型[12]。激活函数对CNN有着十分重要的作用,能将神经元的输入映射到输出端。文献[20]提出在CNN中使用ReLU作为激活函数,加快了模型收敛的同时也解决了梯度消失的问题,提高了模型的鲁棒性。不少学者也通过不断地改进ReLU激活函数来优化神经网络,例如:LReLU、ELU等[21]。但是ReLU和其众多衍生版本的参数调整都是静态的,伴随着参数的增加,容易出现过拟合的情况。
本文以AlexNet网络结构为基础,引入动态激活函数DY-ReLU,提出一种优化的DY-CNN模型,并且为了加快收敛,将每个卷积层的卷积核个数减半,优化后的网络结构如图4所示。
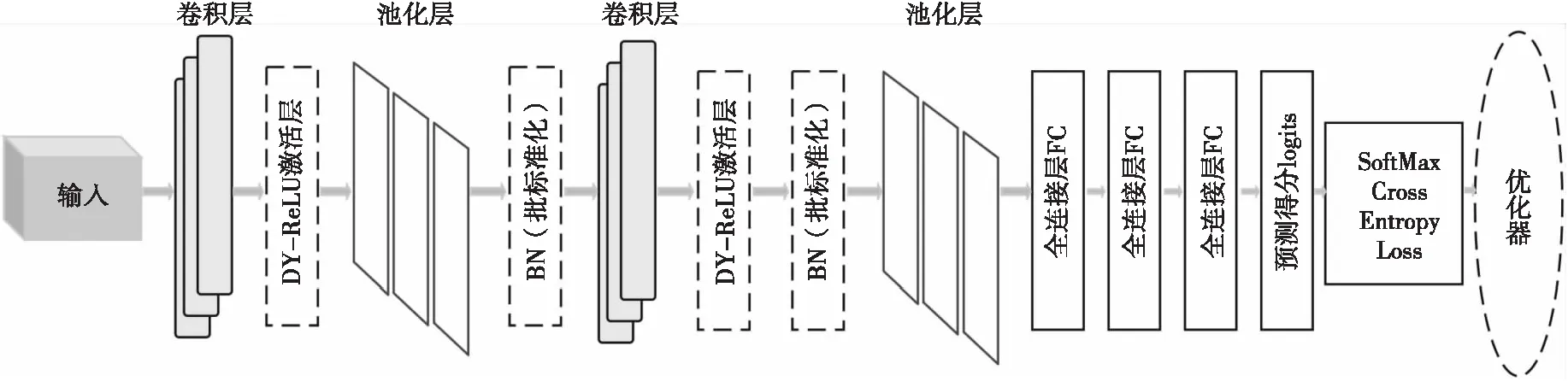
图4 DY-CNN模型结构Fig.4 DY-CNN model structure
激活函数在神经网络中的应用,增加了网络模型的非线性,可以将当前特征空间通过一定的线性关系映射到另一个空间,更利于数据分类。
DY-ReLU是一种动态激活函数,该激活函数可以根据不同数据集确定最优的ReLU函数参数。
(7)
(8)

3 实验验证及结果分析
3.1 实验数据采集
实验数据采集点位于我国东部沿海城市黄海海域,在岸基处分别放置两台三轴感应式传感器,一台磁通门传感器,其中磁通门传感器以地磁信号为基准作为目标标定,感应式传感器用于测量工频频段水下目标。传感器采样率3 000 Hz,定位数据采用惯性导航系统实施动态差分。水下目标为无人潜航器,下潜深度3 m,离岸距离CPA=30 m。为了更好地实现工频环境下的电磁探测,在岸基处还放置了一个100 W的灯泡作为用电负载,模拟一个微型的电力系统,家用灯泡一般为50 W,本实验选择功率更大的负载,电压恒定,用电设备的功率越大,线路中通过的电流也就越大,产生的磁场越强。在给灯泡供电的过程中,由于220 V输电线路中存在50 Hz交变电流流通,产生了50 Hz的工频磁场,增强了工频背景场的信号强度。在模拟的电力系统和变电站、城市电网输电线等所产生的工频磁场的叠加作用下,实验地点实测工频信号强度达到18 nT左右。目标及传感器布位如图5所示。两种传感器的同步测量数据如图6所示。
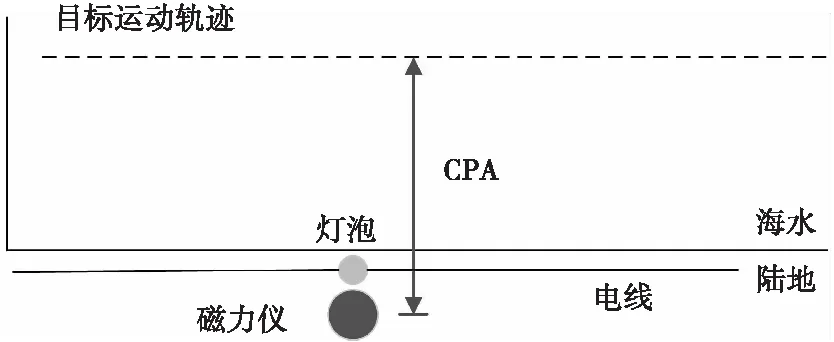
图5 传感器布位图Fig.5 Sensor layout
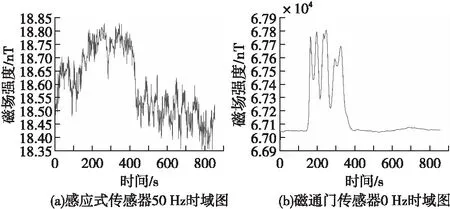
图6 两种传感器同步测量时域图Fig.6 Time domain diagram of two sensors synchronously measured
3.2 数据集构建
根据实测的水下目标数据,将信号截取并转换成64×64格式的二维图。两种不同状态的二维图转化如图7所示。
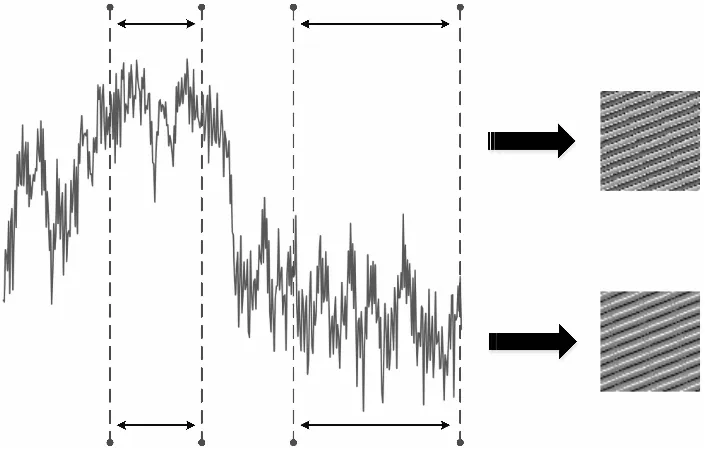
图7 两种状态的时域信号转化二维图像Fig.7 Two state time-domain signal transformation into two-dimensional image
从图7可以看出,有目标的信号和无目标的信号转换成图像后,差异并不明显。由于工频磁异常信号为弱磁信号,实测数据的幅值变化非常小,并且还包含着磁探设备自身的噪声以及强度较高的背景场等干扰,目标信号往往被淹没在这些复杂的噪声成分中。
原始数据由上述方法转换后一共获得1 500张图像,其中有目标500张,无目标1 000张。将两种数据中各取100张作为测试集M2,剩下的作为训练集M1,并打上标签,1代表有目标,0代表无目标。具体结构如表1所示。
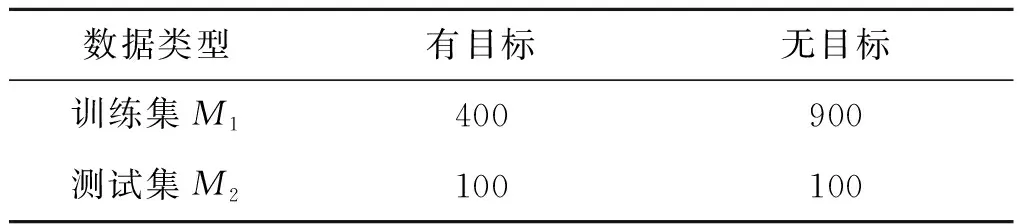
表1 数据集介绍Tab.1 Dataset introduction
3.3 数据增强
实际测量中,由于无目标的数据量远远高于有目标的,在神经网络的训练中,这种倾斜的数据结构极易造成检测结果的偏移。本文使用DCGAN进行数据增强来解决此样本分布不均的问题。
DCGAN模型中生成器网络和判别器网络都有5层。生成器网络的输入层为带ReLU激活的线性层,然后是3个带有ReLU激活的反卷积层,最后一层输出层为带tanh激活的反卷积层。判别器包括4个带有LeakyReLU激活的卷积层和最后一个带有sigmoid激活的线性层组成。学习率为0.000 2。将数据集M1中有目标的数据作为DCGAN的输入,由DCGAN经过多轮的迭代后生成500张有目标的数据图像,扩充后的图像如图8所示。
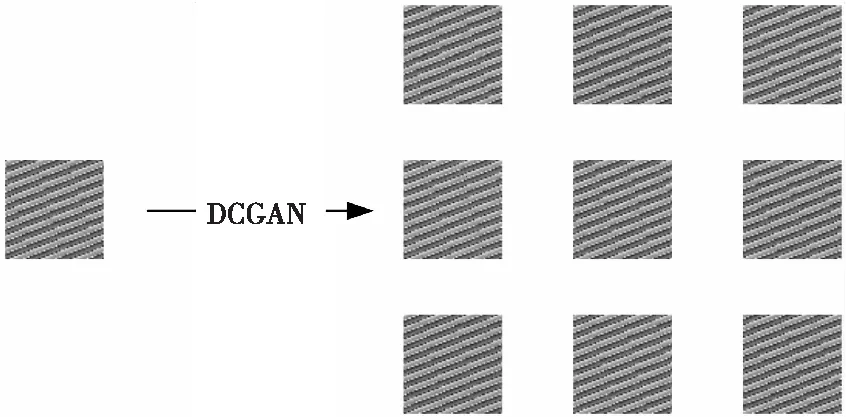
图8 由DCGAN扩充的样本图像Fig.8 Sample images augmented by DCGAN
将新获得的500张有目标的图像,加入到数据集M1中,记为数据集M3。有目标的数据达到了900张,与无目标的数据量相等。

表2 数据增强后的数据集Tab.2 Data augmented dataset
3.4 数据增强后的识别率比较
分别对原始样本和增强样本训练,测试DY-CNN在低样本下的识别精度和数据强化后的识别精度,实验结果如表3所示。

表3 数据增强前后准确率对比Tab.3 Accuracy comparison before and after data enhancement
由表3可知,在使用原始样本M1为训练集,以M2为测试集,DY-CNN识别率为82.5%;经过数据增广后,将M3作为训练集时,以M2为测试集,识别率为92.5%,相比没有增广时,识别精度提高了10%。
3.5 不同激活函数下模型性能评估
在增广数据集下将DY-CNN与CNN中其他常用的激活函数效果进行对比。本实验为二分类问题,因此以准确率、F1-score两个指标作为模型的评价标准。准确率能较直观地反映模型的识别精度,F1越大代表模型性能越好,具体数据如表4所示。不同激活函数的loss曲线如图9所示,loss值反映了预测值和真实值的距离,loss值随着迭代次数的增加而逐渐收敛,代表模型也逐渐优化到最佳。

表4 DY-CNN与其他激活函数性能对比Tab.4 Performance comparison of DY-CNN and other activation functions
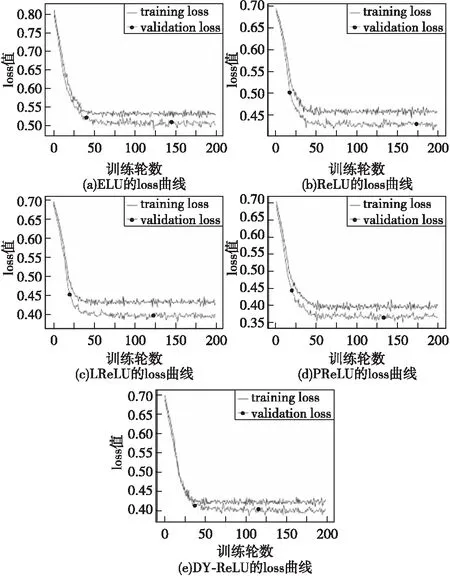
图9 不同激活函数的loss曲线Fig.9 Loss curves of different activation functions
由表4可知,引入了DY-Relu的网络模型的准确率比ReLU、LReLU、PReLU和ELU模型分别高出4.5%、4%、3%和2.5%;DY-Relu的网络模型的F1-score比ReLU、LReLU、PReLU和ELU模型分别高出5%、4%、1%和2%。
4 结论
本文将水下目标的一维时域信号转换到二维图像,利用DCGAN将有限的数据样本进行扩充,一定程度上解决了由样本数据倾斜造成的识别率偏低的问题。同时将动态激活函数DY-ReLU引入到CNN结构中进行优化,从而有效地提升了工频磁场环境下的水下目标识别精度。使用样本增强的DY-CNN相较于小样本下的识别率提升了10%,识别率达到92.5%;引入了动态激活函数的CNN模型无论在识别率还是在克服模型偏移方面,都比传统使用静态激活函数的CNN模型更加优秀。然而工频磁场作为一种全新的磁探技术,其探测理论还需要进一步的完善,以缓解目标信号特征提取困难的局面。
