基于翼伞系统的新型末敏弹技术研究
2023-03-06李引良
王 力,孙 昊,李引良
(1 西安现代控制技术研究所,陕西 西安 710065;2 南开大学人工智能学院,天津 300350)
0 引言
传统末敏弹是一种“打了不用管”的灵巧弹药[1-2],然而由于在末端一般采用降落伞或旋转伞进行减速并探测敌方目标,弹药的最终落点不可控,影响其毁伤效能及打击准确性[3-5]。因此,如何提高末敏弹的打击精度一直是末敏弹领域的重点研究内容[6-7]。
相关研究如马宗成等[8]基于欧拉方法建立了航空末敏子母弹的母弹飞行阶段六自由度数学模型和航空末敏弹的全弹道模型,对航空末敏子母弹子弹的地面散布问题进行了研究。杨永亮等[9]推导超大攻角条件下末敏子弹的空间六自由度弹道方程,计算分析子弹的稳态扫描运动特性,推导能实现稳定扫描的子弹初始抛撒角度等因素。陈亮等[10-11]研究了掠飞末敏弹在高速滚转状态下的气动特性,所提出的模拟方法可有效消除姿态角计算的累积误差,实现对弹箭任意给定角运动的准确模拟。王丹妮等[12]提出了一种目标识别和定位算法,用于提高末敏弹目标识别能力和定位精度。闫广利等[13]提出一种基于卷积神经网络(convolutional neural network, CNN)的复合探测信号识别方法,用以进一步提高末敏弹的目标识别性能。
通过分析已有文献可以看出,末敏弹的相关研究多集中于其动力学模拟以及信号识别等方面。然而,若末敏子弹在抛洒后与打击目标存在较大的水平位置误差,则末敏子弹在抛撒后的初始阶段就无法靠近敌方目标,而相关方法更难以实现对目标的探测和打击。针对该问题,提出一种基于翼伞的新型末敏弹技术,翼伞可通过调整操纵绳长度控制飞行方向[14-15],因此区别于传统伞降系统,其落点位置可控,且能补偿环境风场的干扰。考虑到战场环境下需要缩短弹体的留空时间[16],设计了一种速降翼伞系统,相较于传统翼伞,该系统的飞行速度快、留空时间短。同时,通过建立伞-弹系统的动力学模型,设计了自抗扰控制器,并实现了翼伞-末敏弹的实际飞行测试,对所提算法进行了验证。
1 翼伞技术介绍
如图1所示,翼伞系统分为负载及伞体两部分,负载和伞体之间通过悬挂绳以及控制绳相连接,翼伞的前缘开口,空气可由开口进入,并为系统提供升力。

图1 翼伞系统示意图Fig.1 Schematic diagram of parafoil
如图2所示,通过系统舵机可调整左右两侧控制绳的长度,即可操纵翼伞的飞行方向,实现落点的精准控制。翼伞系统也因此独特优势获得了国内外相关领域专家的广泛关注。美国在该领域的研究时间较早,根据已经公开的资料显示,美军分别在1994年和1996年推出2010年的“二十一世纪陆军”计划与2025年的“下下一代陆军”(arm after next,AAN)计划。在AAN计划里将“先进的空投手段”列为首要的国防需求, 并对 “先进精确空投系统”(advanced precision airborne delivery systems, APADS)进行研制,用于实现战场物资的精确制导空投。

图2 翼伞系统下视图Fig.2 Bottom view of parafoil
如图3所示,2004年美国纳蒂克士兵系统中心与联合部队司令部(joint forces command)进行合作,希望设计一种基于翼伞的联合精确空投系统(joint precision airdrop system)设备,在战场中通过飞行器投放,进行物资、武器的空投补给,其预定负载重量在1 000~4 500 kg,投放高度在7 620 m以下,所设计的最远飞行距离为30 km,该系统的落点误差在100 m以内。该联合精确空投系统也在2008年于阿富汗境内通过C-17战略运输机进行舱内投放,实现了在近似实战情况下的首次精确空投。

图3 联合精确空投系统项目规划图Fig.3 Schematic diagram of joint precision aerial delivery system
文中采用翼伞系统代替末敏弹中原有的减速伞或旋转伞,在子弹抛洒后调整其飞行方向,控制末敏子弹飞往目标点,实现精确打击。而传统翼伞的设计初衷是实现精确空投,设计的重点在于飞行稳定。为缩短留空时间,需降低翼伞载具的面积,提高飞行和下降速度,也为相关控制器研究提出了新的挑战。
2 翼伞末敏弹技术
2.1 自抗扰控制算法
翼伞末敏弹系统采用柔性翼伞控制飞行方向,非线性特恶性相较于传统刚性飞行器更高,因此对控制器的抗扰能力提出了更高的要求。针对翼伞末敏弹系统,采用自抗扰控制技术实现翼伞系统的精准控制。如图4所示,自抗扰控制术采用扩张状态观测器对包含风场扰动在内的环境总扰动进行观测,并进行反馈补偿。其中,kp和kd分别为控制器的比例和微分系数。

图4 自抗扰控制技术Fig.4 Active disturbance rejection control technology
可假设翼伞系统偏航角的角加速度为:
(1)

根据该系统,可将偏航角状态表示为:
(2)

根据式(2),可建立针对偏航角、角速度及其角加速度的扩张状态观测器,扩张状态观测器可表示为:
(3)
(4)

根据式(3),可将式(2)转化为:
(5)
式中:X(t)=[x1x2x3]T;D=[0 0 1]T。
定义观测误差为X(t)=[x1x2x3]T,系统的观测误差可表示为ξ(t)=[e1e2e3]T,结合式(3)与式(5),可得:
(6)
式中矩阵L需满足:
det(sI-A+LC)=s3+l1s2+l2s+l3
(7)
须将s2+l1s2+l2s+l3定义为Hurwitz多项式,用于确保控制器稳定性,为将极点配置于-wo,可设定:
λ(s)=s3+l1s2+l2s+l3=(s+wo)3
(8)

自抗扰控制器的控制量可表示为:
(9)

基于式(1)~式(9),环境风场即可被精确观测和补偿,实现翼伞末敏弹系统的精准控制。
2.2 飞行试验
通过伞翼无人机控制器,如图5所示,设计了翼伞末敏弹系统的原理样机,并采用面积较小的翼伞,用于提升系统的水平和垂直飞行速度,以此提高系统的抗风扰能力。所设计原型机包含翼伞主控制器、弹形负载、数传模块、卫星定位模块、数据记录模块等,可针对该系统进行实际飞行测试,验证翼伞末敏弹系统的可行性。

图5 翼伞末敏弹系统原理样机Fig.5 Principled sample machine of parafoil terminal sensitive projectile
飞行试验结果如图6~图10所示。在此设定翼伞系统的打击初始水平位置为[0,0],抛洒初始高度为357.2 m,则该实验的打击目标坐标为[75.5 m,12.5 m,0 m]。若应用传统基于减速伞或旋转伞,则末敏子弹将从[0 m,0 m,357.2 m]的坐标下开始单侧旋转飞行,而末敏弹的探测范围半径一般为30 m,则在此初始值下传统末敏弹系统无法实现打击。
而通过引入翼伞进行飞行方向控制后,如图6、图7所示,可以看到翼伞末敏弹系统可向目标点飞行,并两次直接穿越目标点上空。如图8所示,两次距离误差小于2 m,而最终落点误差也在30 m范围以内,可实现精确打击。

图7 水平轨迹Fig.7 Horizontal flight trajectory
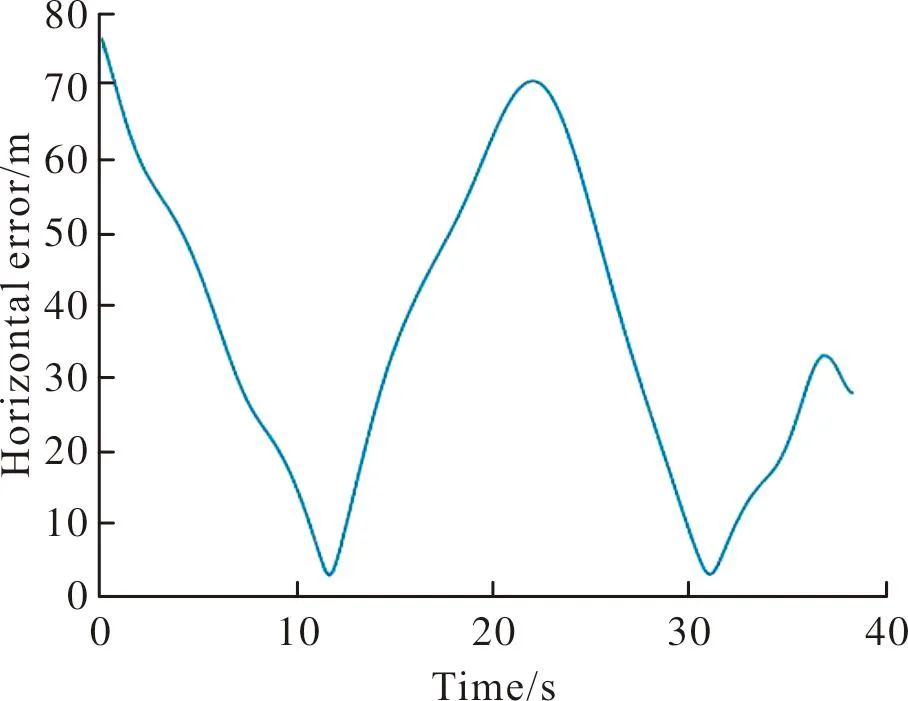
图8 水平误差Fig.8 Horizontal flight error
此外,如图9、图10所示,可以看到翼伞末敏弹系统在采用速降翼伞后,水平速度可达20 m/s、垂直速度可达10 m/s,大幅度提高了系统的飞行速度,降低其留空时间,防止敌方进行探测躲避。且通过飞行速度差可计算出环境风场约为6 m/s,在该风场下,翼伞末敏弹系统可实现精确落点控制,也验证了该系统相较于传统降落伞存在巨大优势。

图9 水平速度Fig.9 Horizontal flight velocity
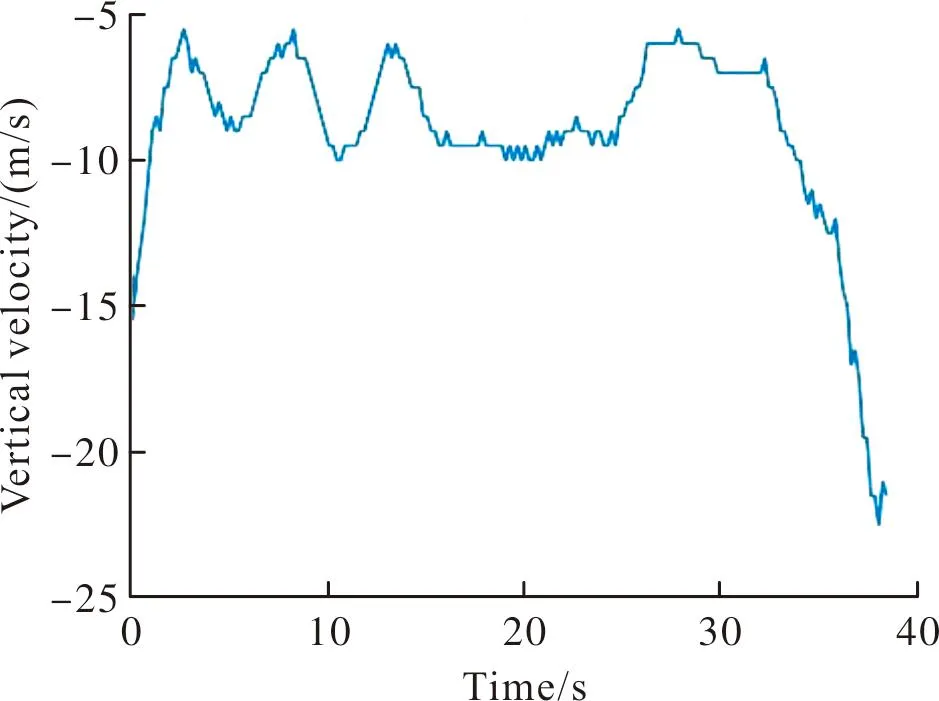
图10 垂直速度Fig.10 Vertical flight velocity
3 结论
提出了一种速降翼伞的新型末敏弹,并针对性的设计了自抗扰控制器,区别于传统基于降落伞的无控末敏弹,翼伞末敏弹可通过翼伞调整子弹的飞行方向,超向目标点飞行,解决传统末敏弹打击成功率受抛洒初始位置限制的问题。实际飞行试验结果证明,该系统能实现弹体的精准着陆,大幅度提高末敏弹系统的打击精确性。
