基于容错惯性网络的相对导航方法
2023-03-06李振威程咏梅张亚崇冯鑫涛陈可正
李振威,程咏梅,张亚崇,冯鑫涛,陈可正
(1.西北工业大学 自动化学院,西安 710129;2.西安飞行自动控制研究所,西安 710129)
可执行多载荷任务的通用飞机通常搭载雷达、相机等多种任务设备,用于对外部环境的探测、侦查,分布在机翼的不同位置[1]。由于飞机机翼存在动态的挠曲变形[2],通常在任务设备处安装子惯性导航系统,测量任务设备的自身运动信息,以满足任务设备的工作需求。任务设备的性能一定程度上取决于惯性传感器的精度,受限于体积、重量的要求,任务设备处安装的惯性传感器精度较低,无法满足需求[3]。用于飞行导航的主惯性导航系统具有高精度的运动状态测量特性,利用主惯性导航系统对子惯性导航系统进行传递对准,提高子惯性导航系统的测量精度,改善任务设备的性能,实现对目标的精准探测[4]。
传递对准技术利用安装在机身处的主惯性导航系统对任务设备处的子惯性导航系统进行误差估计与补偿,是提升子惯性导航系统性能的广泛应用技术[5]。传递对准方法主要包括姿态匹配[6]、速度匹配[7]、速度+姿态匹配[8]、加速度匹配[9]、角速度匹配[10]等。由于机翼结构的复杂性以及挠曲变形本身的不可预见性,使得挠曲变形成为传递对准中的一个非常重要问题[1]。针对该问题,国内外学者提出了不同的改进方法。文献[5]建立了机翼动态变形影响下的速度匹配模型,文献[4]提出基于差分滤波器的线加速度+角速度匹配方法,文献[11]提出基于分布式IMU 的相对姿态匹配方法。上述方法在进行传递对准时,分别采取一阶、二阶马尔科夫模型来描述机翼挠曲。然而,实际的挠曲变形可能并不符合马尔科夫模型,这将会导致传递对准的性能降低[12]。文献[12]提出了一种新的基于相对导航的传递对准方法,该方法无需建立机翼挠曲模型,利用主、子相对导航模型估计机翼挠曲,提高了传递对准性能。文献[13]将相对导航方法扩展到基于多节点IMU 的惯性网络。然而,以上方法忽略了高动态飞行下,子惯导受干扰易发生量测异常的问题[14]。因此,面向小体积、低重量的子惯性传感器精度较低,且存在随机故障的问题,如何利用多个子惯性传感器构建惯性网络提高挠曲变形下子惯性导航系统的精度和可靠性,是亟待解决的一项关键技术。
本文提出一种基于容错惯性网络的相对导航方法,首先建立挠曲变形下多节点之间的动态关系转换模型以构成冗余测量信息,进行基于广义似然比检测的最小二乘融合,提高了测量数据的可靠性和精度,然后利用惯性网络间的局部运动信息进行相对导航解算,完成了挠曲条件下主、子节点间的高精度相对运动估计,实现了主、子节点间的高精度传递对准。
1 挠性杆臂下基于广义似然比检测的多节点信息融合
建立机载惯性网络系统,其中高精度主惯性导航系统(简称主节点)安装在机体质心处,多个子惯性导航系统(简称子节点)分别安装在机翼不同位置,见图1。

图1 机载任务设备分布示意图Fig.1 Distribution diagram of airborne mission equipment
1.1 挠性杆臂动态转换
动态关系转换的主要思想是:将各个节点输出转换到统一坐标系下,通过旋转和平移两个步骤完成,旋转解决不同子惯性导航系统安装误差角不同的影响,平移解决杆臂误差的影响。
刚性杆臂条件下,只需利用节点间的旋转矩阵和杆臂误差将各个节点对准到统一坐标系。挠性杆臂条件下,机翼挠曲变形对各子节点之间带来了局部相对运动信息,需要做进一步补偿。机翼的长度远大于厚度,将机翼视为薄板,采用薄板模型对机翼挠曲进行建模[15]。在载荷q的作用下,机翼挠曲模型见图2。

图2 机翼挠曲模型Fig.2 Wing flexure model
根据力学原理有以下机翼弯曲的平衡方程[15]:
式中,w为位置(x,y)处的挠度,D为弹性系数,q(x,y)为位置(x,y)处的载荷。
按照有限元分析,实际上机翼的前三阶模态响应和力学响应均为弯曲,所以可近似认为w对y的各阶偏导数均为零,从而根据式(1),简化得到新的平衡方程:
对机翼而言,可以将其视为一边固支,三边自由的矩形板,那么就有边界条件[15]:
(1)固支边x=0,位移边界条件:
(2)自由边x=LT,力边界条件:
结合式(3)(4),对式(2)进行积分可得到机翼挠曲模型:
如图2所示,通过对机翼曲线求偏导可获得其对应的斜率,从而获得挠曲变形角γ。
以x位置为例,其位置处的挠曲变形角γ为:
考虑到挠曲变形角通常小于5 °,利用小角度近似γ≈tanγ,得到挠曲角与挠曲位移的关系:
建立第j个子节点挠曲角速率与第k个子节点挠曲角速率的关系:
对子节点之间的相对挠曲导致的角运动进行补偿,子节点j到子节点k的角速率的动态转换关系为:
对于加速度计,需要对挠曲杆臂加速度进行补偿,子节点j的挠曲杆臂向量Rsj表示为:
则子节点j处产生的挠曲变形加速度为:
对子节点之间的杆臂加速度和挠曲变形加速度进行补偿,子节点j到子节点k加速度计输出的动态转换关系为:
1.2 基于广义似然比检测的多节点信息融合
各节点接收其他节点转换的数据后,构成冗余测量信息,建立基于广义似然比检测[16]的最小二乘融合模型,实现惯性网络的容错性能。
1.2.1 奇偶方程
对子节点1 处的冗余测量信息,建立观测方程:
式中,y表示冗余的测量数据,x表示真实的状态向量,Hsr表示测量矩阵,b表示测量数据的故障,ε表示服从零均值高斯分布的噪声,其协方差矩阵为R1。
对观测方程中的状态x进行解耦,利用奇偶矩阵V,使满足:
式中,P表示奇偶残差,P仅与噪声和故障有关。V可以通过Potter 算法得到[17]。
测量数据无故障情况下,b=0,则:
式中,P服从零均值高斯分布。
测量数据有故障情况下,b≠0,此时P的统计特性与式(16)不同。依据此特性,对测量数据进行广义似然比检测。
1.2.2 广义似然比检测
建立二元假设,无故障为H0,有故障为H1:
式中,μ=VTb。
基于二元假设的似然函数φ(·)为:
式中,K为固定值,在似然函数比中可约去。
对μ求导,极大对数似然函数比Lmax(·)为[17]:
基于以上推导,构建广义似然比故障检测函数:
式中,FD表示故障检测函数值,服从卡方分布,即FD~χ2(n-m),n表示测量数据维数,m表示状态维数。
故障检测准则为:
式中,TD为故障检测阈值,通过查询卡方分布表获得。
1.2.3 多节点信息融合
定义第i个测量数据的故障隔离函数FIi为:
若FIi越大,发生故障的似然函数值ln[φ(P|H1)]越大。因此当检测出故障时,通过比较FIi,可以隔离出故障的测量数据:
1.2.4 建立基于加权最小二乘的测量数据融合模型
广义似然比故障检测算法的最小可检测偏差为[16]:
式中,η为最小可检测偏差,α和β分别表示虚警率和漏检率,和为对应置信区间下的卡方分布函数值。
当故障幅值小于最小可检测偏差时,故障检测算法性能大幅降低,因此利用加权最小二乘方法进一步对冗余测量进行全局融合,加权最小二乘估计准则为:
故障隔离函数值的大小可以体现测量数据的质量,利用故障隔离函数值构造权值矩阵,第i维测量数据的权重为:
构造最小二乘权值矩阵为:
基于加权最小二乘的测量数据融合模型为:
2 相对导航误差估计与补偿
考虑到本文需求为监测机翼挠曲的微小变化,捷联惯性导航算法利用地球坐标系进行解算,解算过程中将会引入坐标系间的转换误差,因为本文建立以主惯导为主坐标系的相对惯性导航解算方法。
2.1 相对惯性导航解算
本文采用相对惯性导航算法进行主子惯导间传递对准,通过相对姿态微分方程、相对速度微分方程以及相对位置微分方程递推解算。考虑主惯导坐标系与子惯导坐标系的关系,有:
从而相对姿态微分方程为:
在主节点坐标系下,相对速度微分方程为:
式中,V表示主、子节点间相对速度,R表示相对位置,fm和fs分别表示主、子节点的加速度计输出。
式(32)不易计算,定义伪相对速度U:
对式(33)两端进行微分:
相对位置微分方程为:
式(31)(34)和(35)构成相对导航微分方程,通过微分方程的数值求解方法即可获得子节点相对于主节点的运动关系。
2.2 误差估计与补偿
相对惯性导航算法会受子节点IMU 安装误差、传感器噪声等很多因素的影响,如果不进行误差补偿,导航结果会很快发散,因此需要建立相对导航误差模型。
根据相对姿态微分方程,考虑陀螺噪声ε影响,可得相对姿态误差方程:
根据伪相对速度微分误差,考虑加速度计噪声∇影响,可得伪相对速度误差方程为:
相对位置误差的变化率为相对速度误差,相对位置误差方程为:
式(36)(37)和(38)构成相对导航误差方程。
状态空间方程可写为:
式中,F为系统矩阵,G为噪声激励矩阵,α为系统噪声。
考虑相对姿态误差、相对速度误差、相对位置误差以及陀螺、加速度计常值漂移的影响,此时15 维状态向量为:
系统矩阵F为:
噪声激励矩阵G为:
系统噪声α为:
相对惯性导航的解算过程没有任何外界参考信息,因而给量测值的选择带来一定困难。但是考虑到机翼形状的约束,选用相对位置误差δ R作为量测量。
量测方程可写为:
式中,H为观测矩阵,β为量测噪声。
观测矩阵H为:
如图3所示,表示由相对导航算法计算的相对位置;R表示主、子节点间的实际相对位置;L表示标称相对位置;表示挠曲位移,即子节点在机翼变形的影响下,偏离了其标称位置的挠曲位移向量。根据几何关系,δR可表示为:

图3 相对位置误差几何示意图Fig.3 Geometric diagram of relative position error
考虑挠曲角与挠曲位移的约束关系,建立约束模型,如图4所示。根据图中几何关系,可得:

图4 挠曲位移与挠曲角关系图Fig.4 Relationship between flexure displacement and flexure angle
式中,μf,y由相对姿态计算值和标称值相减所得,表示杆臂在x轴上的分量。
卡尔曼滤波模型分为时间更新和量测更新[18]:
1)时间更新:
2)量测更新:
式中,K(k)表示滤波增益,表示量测噪声的协方差,X(k) 表示估计值,P(k) 表示估计值的误差协方差。
使用卡尔曼滤波器估计出的X(k)对相对导航解算值进行反馈校正,完成高精度的局部相对运动估计。
算法总体框架见图5。
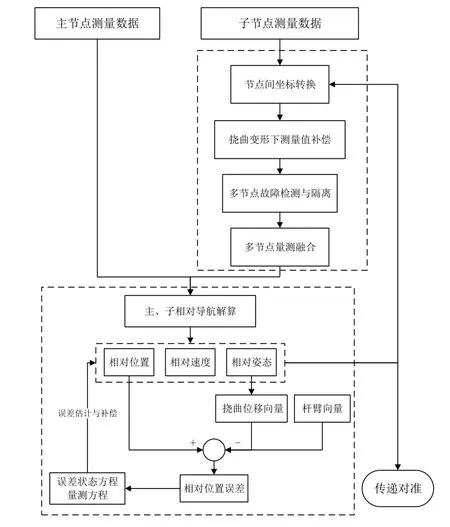
图5 基于容错惯性网络的相对导航方法流程图Fig.5 Flow chart of relative navigation method based on fault-tolerant inertial network
3 仿真实验与分析
仿真条件:飞机搭载一个主惯导、四个子惯导,构成了一主、四子的惯性网络,四个子惯导在主惯坐标系下的安装位置分别为1 m、2 m、3 m、4 m 处,分别为子节点1、2、3、4。机翼低频挠曲为0.01 Hz,在子惯4 处最大挠曲位移为160 mm,高频挠曲为20 Hz、25 Hz 和30 Hz,幅值分别为1 mm、0.5 mm和0.5 mm。传感器采样时间设置为0.01 s,滤波器解算频率为50 Hz,传感器参数见表1,飞行轨迹见图6。

图6 飞行轨迹Fig.6 Flight trajectory

表1 传感器参数Tab.1 Sensor parameters
选用相对位置的均方根误差RMSE 作为衡量相对位置误差的指标。相对位置的均方根误差RMSE 定义为:
同理,相对姿态的均方根误差RMSE 定义为:
为验证所提的分布式容错相对导航方法的优越性,设计两组仿真实验。
第一组仿真实验,传感器无故障下,对单节点方法和分布式方法进行对比,单节点表示使用一主、一子进行主子相对导航解算,分布式表示使用一主、四子进行分布式相对导航解算。图7-8 为子节点1 的相对导航结果,由图中可以看出,分布式的相对位置误差和相对姿态明显小于单节点。

图7 相对位置误差对比(单节点和分布式)Fig.7 Relative position error (single node and distributed)

图8 相对姿态误差对比(单节点和分布式)Fig.8 Relative attitude error (single node and distributed)
400 s-500 s 期间的性能统计见表2-3,从表中可以看出,采用单节点方法,x、y、z三个方向的相对位置估计精度分别为 0.1412 mm、0.1493 mm、0.3062 mm,三个方向的相对姿态估计精度分别为1.2234'、0.8104'、4.3565'。采用分布式方法,x、y、z三个方向的相对位置估计精度分别为0.0600 mm、0.0563 mm、0.2658 mm,三个方向的相对姿态估计精度分别为0.2976'、0.2568'、0.9989'。相对于单节点,分布式提高了相对姿态和相对位置的估计精度,体现了分布式方法的优越性。
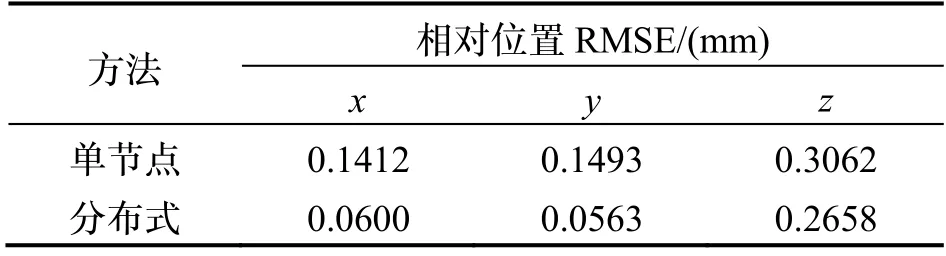
表2 相对位置性能统计Tab.2 Performance of relative position
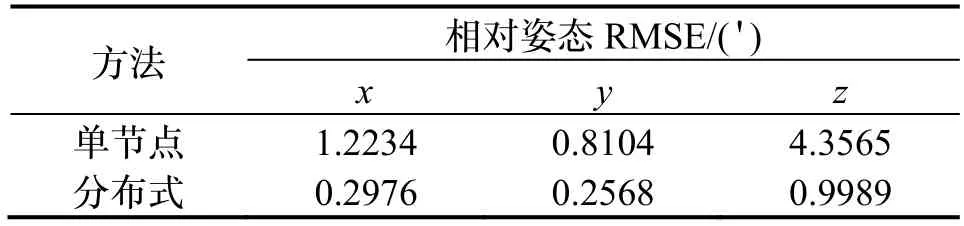
表3 相对姿态性能统计Tab.3 Performance of relative attitude
第二组仿真实验,在传感器故障情况下,对比未加入容错的分布式方法和分布式容错方法。在400 s-500 s 向y轴陀螺注入10 倍噪声幅值的故障,图9-10 为相对导航结果。由图中可以看出,未加入容错的分布式方法受故障的影响很大,在故障发生期间,出现了较大的误差,而分布式容错方法对传感器的故障起到了很好的容错效果。400 s-500 s 期间的性能统计见表4-5,从表中可以看出,采用分布式方法,x、y、z三个方向的相对位置估计精度分别为5.1075 mm、0.4877 mm、5.5251 mm,三个方向的相对姿态估计精度分别为9.3637'、29.8118'、50.7981'。采用分布式容错方法,x、y、z三个方向的相对位置估计精度分别为 0.0646 mm、0.0634 mm、0.7377 mm,三个方向的相对姿态估计精度分别为0.3376'、0.2412'、1.2178'。可以看出在故障发生时,相对于分布式,所提的分布式容错方法改善了相对姿态和相对位置的估计精度,未加入容错的分布式方法精度大大降低。

表4 相对位置性能统计Tab.4 Performance of relative position

图9 相对位置误差对比(分布式和分布式容错)Fig.9 Relative position error (distributed and distributed fault tolerance)

图10 相对姿态误差对比(分布式和分布式容错)Fig.10 Relative attitude error (distributed and distributed fault tolerance)

表5 相对姿态性能统计Tab.5 Performance of relative attitude
综上,仿真结果表明了本文所提方法的有效性。本文方法充分发挥惯性网络的优势,提供了一种机翼挠曲变形下分布式容错相对导航方法,实现了机翼挠曲变形以及传感器故障下的高精度相对运动估计。
4 结论
本文建立了挠曲变形下多节点间的动态转换关系模型,构成冗余测量信息,设计了基于广义似然比检测的最小二乘融合方法,提高了惯性测量数据的可靠性和精度。构建的分布式容错相对导航系统将挠曲变形下广义似然比检测和相对运动估计进行结合,在惯性传感器故障情况下,使惯性网络几乎不受故障的影响,改善了相对姿态和相对位置的估计精度。未来工作中,将进一步把所提方法用于半物理实验或实飞实验。
