机载三维激光扫描技术在农房权籍调查中的应用
2023-03-05陈学彬陈丽娜李晓鹏
江 勇,陈学彬,陈丽娜,李晓鹏
(1.江苏省地质测绘院,江苏 南京 211111;2.皖江工学院,安徽 马鞍山 243031)
0 引 言
根据自然资源部提出进一步加快推进农村不动产权籍调查任务的要求,全国性、大范围的农村不动产权籍调查项目生产任务已经展开。目前,传统的全站仪测量手段,不仅无法解决成本高、效率低的问题,也无法满足生产进度和工期的要求。随着测绘科学技术、仪器光电子学科、图形图像处理等学科的发展进步,三维激光扫描仪技术得到了飞速发展,机载三维激光扫描技术实现了对空间三维地理信息数据的采集,其获取的高精度点云数据经点云数据后处理软件可实现实景三维场景再现[1-4]。三维激光扫描仪技术经过多年发展,已从最初的架站式三维激光扫描仪技术发展到现在的基于多载体、多平台的三维激光扫描仪技术,由于三维激光扫描系统在获取中长距离点云数据影像方面取得了突破性进展,因此关于三维激光扫描技术的研究内容、研究方法的发展也进入了一个新的阶段。机载三维激光扫描仪利用其先进的视觉追踪技术,可实现相邻测站间点云的自动拼接[5]。本研究利用机载三维激光扫描仪技术,结合三维真彩色相机,有效的获取了高精度的农房点云数据,经点云数据绘图软件处理,并最终形成了高精度的农房权籍数据。机载三维激光扫描技术将大量的外业工作转化为室内工作,简化了繁重的外业数据采集任务,有效降低了生产成本,极大提高了生产效率。
1 机载三维激光扫描原理
1.1 三维激光扫描系统
AS-900HL多平台激光雷达系统,主要由电源、数据传输线、控制器、三维激光扫描仪4个部分组成(图1)。其集成了各类高性能的传感器,包括激光扫描仪、光纤惯导系统IMU、激光传感器等。AS-900HL平台采用了多次回波技术,能够在稀疏植被区域获取精确的地面高程点,并结合软件后处理可自动滤除植被输出DSM、DEM。平台采用了轻量化设计理念,适合无人机飞行平台的操控。综上所述,AS-900HL三维激光扫描仪可经过一次采集,获取多种传感器数据,实现影像与点云数据融合[6-7]。

图1 AS-900HL 机载雷达测量系统
1.2 机载三维激光扫描测量原理
AS-900HL移动式三维激光扫描是通过记录激光不间断的向目标物发出的激光束,即利用激光测距,以及发出激光束的水平角和垂直角计算出目标物的空间位置,同时结合SLAM算法,使得三维激光扫描能实时解算与待测目标物的距离并获得扫描仪与目标物的相对位置关系[8]。
2 研究区域概况
本研究区域以某市农村不动产权籍调查项目为依托,项目区农房多为老旧无人居住房屋,单户房屋以院落为单位,多数相邻宗地间有巷道,少部分相邻宗地有借墙和共墙现象,每个行政村居住区总体比较集中,房屋成片化聚集。本研究区域涉及30个行政村,约2.3万宗农村不动产权籍测量任务。
3 项目规划和实施
本研究以行政村界线为单位,从南向北按照地理位置依次进行数据采集,机载三维激光扫描技术路线如图2所示。
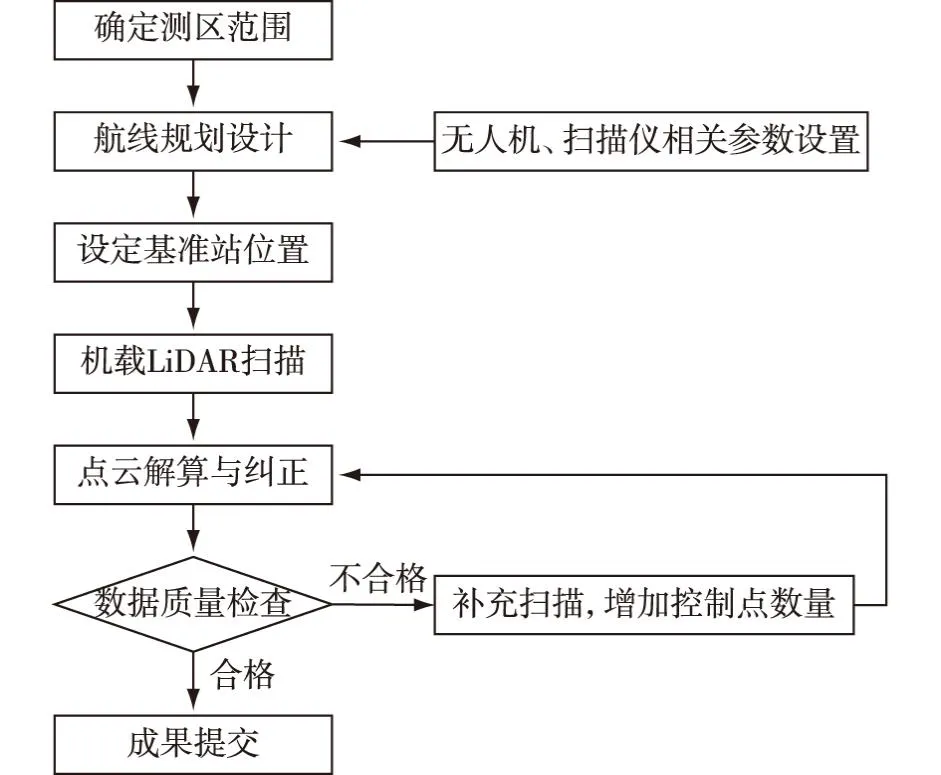
图2 机载三维激光扫描技术路线
3.1 测区航线规划
数据采集前技术人员对测区周围地形地势、障碍物分布、环境干扰等情况进行实地勘察,提前了解测区内房层、高压电力线及大型通信发射塔的位置及高度等信息,同时结合数据完整性及数据精度要求,利用无人机地面站进行航线规划及飞行参数设定,确定无人机的起降点并规划航线,本研究使用DJI GS Pro地面站自定义规划航线,航线设置完成后无人机自动起飞、飞行、返航,完成机载LiDAR外业数据采集,无人机航线规划如图3所示。

图3 无人机航线规划
3.2 数据获取与处理
三维激光扫描仪数据获取和处理流程如下:
(1)原始数据获取,主要获取GNSS基站静态观测数据,POS数据,包括移动站GNSS数据和惯导数据,激光扫描仪扫描数据等。
(2)基站数据转换,利用华测导航CHCData软件,进行天线高改正,将基站数据转换成通用的RENIX 3.02格式。
(3)数据融合解算,通过Inertial Explorer解算出高精度轨迹与Rigel高精度的点云融合,得到点云数据。
(4)点云数据预处理,将原始激光数据与POS数据进行融合解算,转换生成WGS 84坐标系下的las格式激光点云[9-11]。
3.3 点云数据成图和成果展示
本研究使用华测地籍测图软件CoMapping绘制房屋线划图DLG,该软件基于真三维立体环境测图,可同时支持点云数据和正射影像数据的处理,并能够与传统航测作业相兼容。将三维激光点云数据导入测图系统,可实现基于点云的点、线、面等地物要素采集,通过高程裁切,调节高度进行地形要素的快速绘制。对于部分点云扫描不完整的墙体,可通过点云切片快速定位绘图,对于部分不易捕捉的房角点,可以采用线相交辅助法绘制。基于点云测图时要遵从一定的原则:① 只采集点云可准确判读且清晰可见的部分,对于部分点云稀少、发散或缺失的位置不采集;② 当点云出现双层且层距大于5 cm的地方,按中间采集,并做好标记,交由外业实地核实;③ 点云只画能够准确表达且确认无误的地物,对于不确定的地物不处理,遵循“点云到哪画到哪”的绘图原则,对于点云缺失的位置和不确定的地物交由外业实地核实补测;④ 由于源数据是点云且整个测图过程全部是基于点云绘制,测图模式为“点云+2.5维+高程裁切后平面”的方法,这与传统的“房角点+直角化”测图模式不同,传统模式的测图近似的认为房角都是理想化的垂直状态,而现实中几乎没有完全意义上直角的房角存在,大多数房体墙面也不是严格意义上的平面,因此按照点云绘制的房角点多数不是直角。相比于传统的“房角点+直角化”模式测图基于点云测图模式能够更加真实地反映地物特征。遵循本研究严格按照以上绘图方法和原则绘制地籍图,如图4为点云模型及基于点云测图结果。
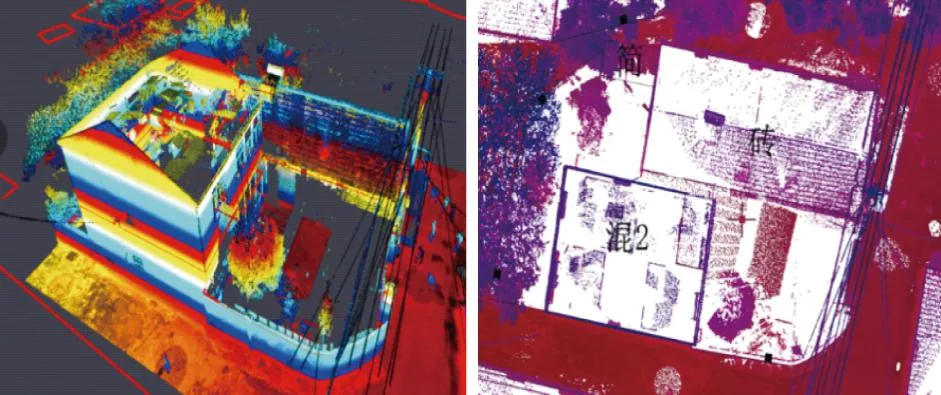
图4 点云模型及基于点云测得平面图
4 数据检查与精度分析
为验证基于机载三维激光扫描点云数据测图精度是否符合要求,本研究利用机载LiDAR和全站仪测图两种方法进行对比分析。为确保研究结果可靠,避免因空域、人工、控制点等外界因素不同的影响,同一时间选定了同一村庄作为研究区域,该区域允许无人机低空飞行,在区域内作业时机载激光雷达系统和全站仪测图基于同一套控制网点进行数据采集。机载三维激光扫描小组以测区范围内的村停车场作为无人机的起降地点开始进行数据采集,同时另一组人员使用全站仪对同一区域内的房角点进行采集。利用机载扫描仪获得区域内高精度的农房点云数据,经CoMapping软件处理后共获得该区域内60宗房屋地籍图,从图上提取60宗农房房角点坐标,共获得244个房角点坐标和86条房屋界址边边长数据,利用全站仪测量数据作为真值进行数理统计对比分析,对其界址点精度、界址边精度进行误差统计及中误差计算,获得界址点精度、界址边精度统计分别如表1和表2所示。
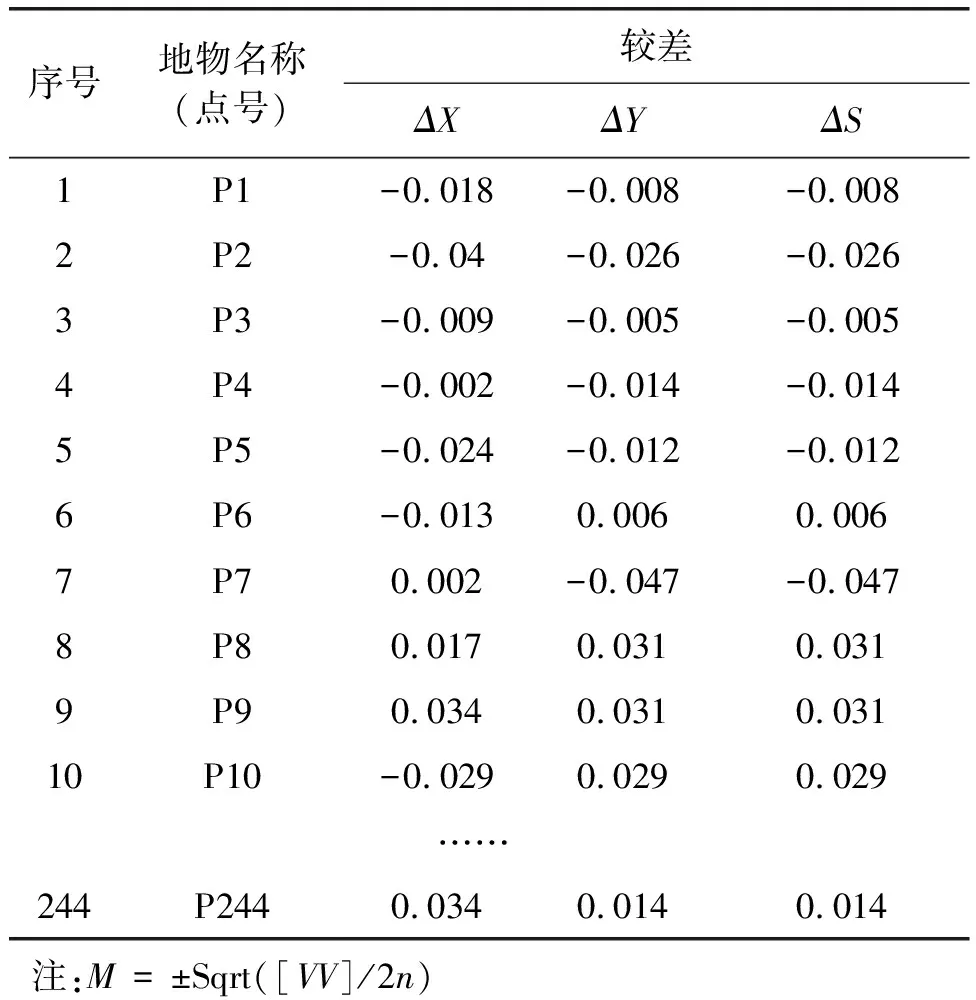
表1 界址点精度统计表(单位/m)
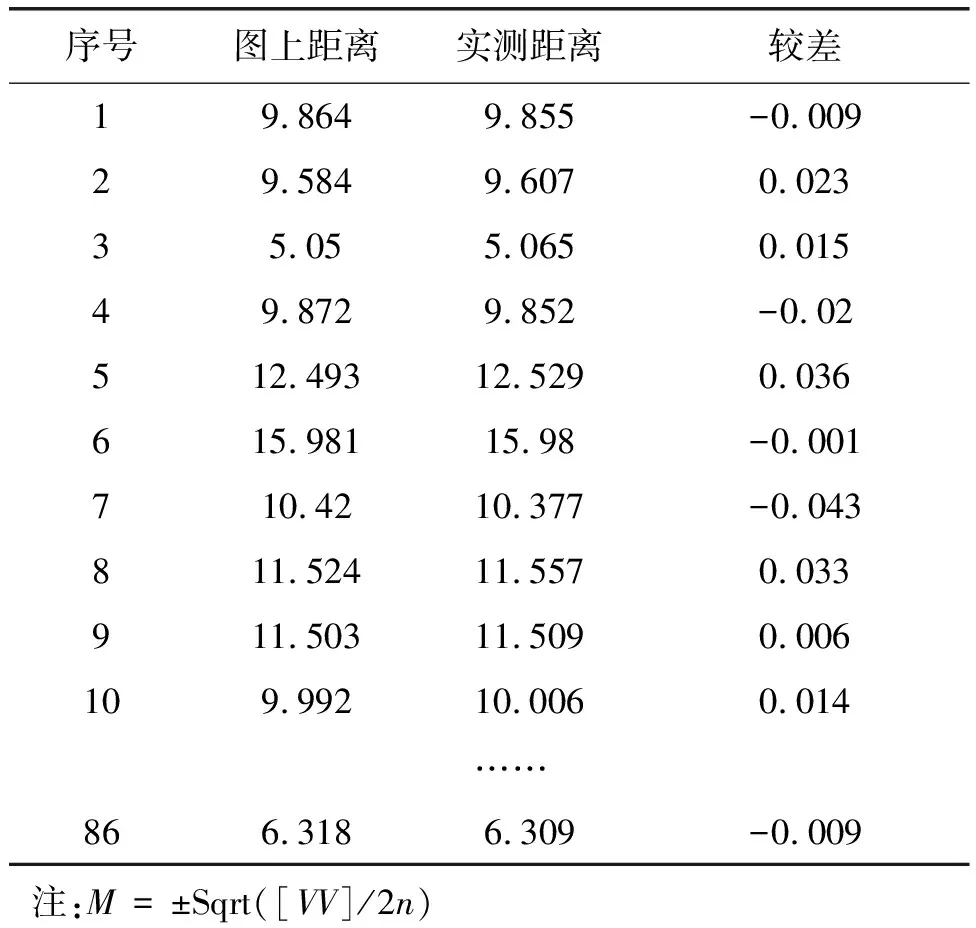
表2 界址边精度统计表(单位/m)
通过检测的86条房屋界址边计算界址边长中误差为±0.028 m,通过采集的244个房屋界址点计算出界址点点位中误差为±0.032 m,精度满足地籍调查规范中界址点点位中误差不超过±0.05 m,边长堪丈中误差小于±0.1 m的要求[12],综上所述,基于点云数据绘制的地籍图成果精确可靠,可作为本次农房权籍调查外业调查成果使用。
5 结 语
研究结果表明,基于机载三维激光扫描仪系统获取的农村地籍数据,其精度满足地籍调查规程中关于界址点精度和房屋边长精度的要求。机载激光雷达系统不受天气、光照等外界环境条件的影响,具有获取空间信息速度快、点云数据精度高的特点,同时机载激光雷达系统发射的激光脉冲对于植被具有一定的穿透作用,对有植被遮挡的房屋区域进行扫测时,可在一定程度上减少因植被遮挡等造成的房屋信息损失。机载激光雷达技术具有传统测量无法比拟的优势,它的应用使空间地理信息数据采集工作变得更加简单、高效。因此机载三维激光扫描仪系统在未来大范围、大区域空间地理信息数据采集方面具有广阔的应用前景。
