基于雷达点迹处理的抗RGPO干扰的机动目标跟踪*
2023-03-02何仁军
何仁军,熊 杰
(1.中国航空工业集团公司成都飞机设计研究所,成都 610041;2.中国西南电子技术研究所,成都 610036)
0 引 言
随着电子对抗技术的发展,雷达面临的威胁越发多样,其中的一个主要威胁为距离欺骗干扰。距离欺骗干扰能使雷达产生距离上的假目标,从而破坏雷达距离跟踪系统[1]。因此,为了维持雷达的跟踪性能,现代雷达须引入对应的抗干扰技术。
距离欺骗干扰可分为距离波门前拖(Range Gate Pull In,RGPI)干扰和距离波门后拖(Range Gate Pull Off,RGPO)干扰,后者因更容易实现而成为最常用的距离欺骗干扰形式[1]。RGPO干扰为一种延时干扰,其实施方式是存储接收到的雷达发射信号并延迟播发,从而欺骗雷达距离跟踪波门[2-3]。
针对RGPO干扰,近年来涌现了多种算法,试图从雷达回波信号[3-4]或者雷达点迹[5-14]层面抑制其对目标跟踪所造成的恶劣影响。基于雷达点迹数据的抗RGPO干扰技术易于实施,因此在实际工程中备受关注。本文同样聚焦于基于雷达点迹的抗RGPO干扰技术。文献[5-6]基于Neyman-Pearson的框架构造二元假设检验对RGPO干扰进行鉴别,并提出基于分解与融合的方法来实现对RGPO干扰环境下的目标跟踪,但该方法由于理论复杂使得其实际操作难度较大。文献[7]将雷达点迹的幅度信息引入多假设跟踪(Multiple Hypothesis Tracking,MHT)中,但该方法在实际中的应用受限于MHT的计算复杂度。文献[8]在特定环境下引入空间约束求解目标与雷达之间距离,从而检测时间延迟干扰。注意到RGPO干扰点迹的方位角和俯仰角与真实目标点迹的方位角和俯仰角接近,文献[9]采用角度χ2检验来判断雷达是否受到RGPO干扰,但该方法在回波信号信噪比较低时误判率将显著上升。文献[10]通过设置信噪比阈值并结合概率数据关联(Probabilistic Data Association,PDA)滤波器来对抗RGPO干扰,但如何设置信噪比阈值尚欠缺理论依据。为缓解角度χ2检验易受信噪比影响的缺陷,文献[11]将其与信噪比似然预处理相结合并使用移位寄存器来检验是否存在RGPO干扰。文献[12]改进文献[11]中使用的移位寄存器逻辑,并在此基础上采用PDA滤波器跟踪机动目标。进一步,在文献[11]与文献[12]的基础上,文献[13]及文献[14]采用多模型(Interacting Multiple Model,IMM)并改进传统PDA滤波器,以此提出一种改进的IMM-PDA算法来实现RGPO干扰下的机动目标跟踪,但PDA滤波器改进方式有待进一步优化。
针对RGPO干扰环境下的目标跟踪问题,本文提出一种基于虚拟点迹的机动目标跟踪算法。在IMM-PDA算法框架下,首先使用信噪比结合角度的χ2检验以及M/N逻辑检验将跟踪波门内的点迹数据分为正常点迹集与RGPO干扰点迹集,不同的集合采取不同的跟踪方式:对于正常点迹集,使用传统的IMM-PDA算法来跟踪目标;对于RGPO干扰点迹集,构造了一个基于该集合的虚拟点迹,并使用IMM算法对目标进行跟踪。最后,融合IMM-PDA滤波器的跟踪状态与IMM滤波器的跟踪状态。仿真结果表明,本文算法的跟踪精度明显优于传统的IMM-PDA算法及其现有抗RGPO干扰跟踪算法的跟踪精度。
1 问题描述
(1)



(2)

(3)
(4)
式中:ρk为k时刻目标到雷达的真实距离;vRGPO为RGPO干扰的拖引速度;k0为实施RGPO干扰的初始时刻;εk,r为测量噪声。

2 抗RGPO干扰的机动目标跟踪算法
杂波环境下,常用的机动目标跟踪算法有MHT跟踪算法、IMM-PDA跟踪算法等。由于MHT跟踪算法中的可行联合假设随着杂波个数及目标个数的增加,其数目指数增长[15],因此本文选用IMM-PDA算法作为机动目标跟踪算法。将RGPO干扰检测、虚拟点迹构造以及基于IMM滤波的航迹更新等环节整合到IMM-PDA跟踪算法中,最终形成抗RGPO干扰的机动目标跟踪算法。

2.1 确定目标有效量测集
构造如下跟踪波门:
(5)

2.2 RGPO干扰检测

(6)
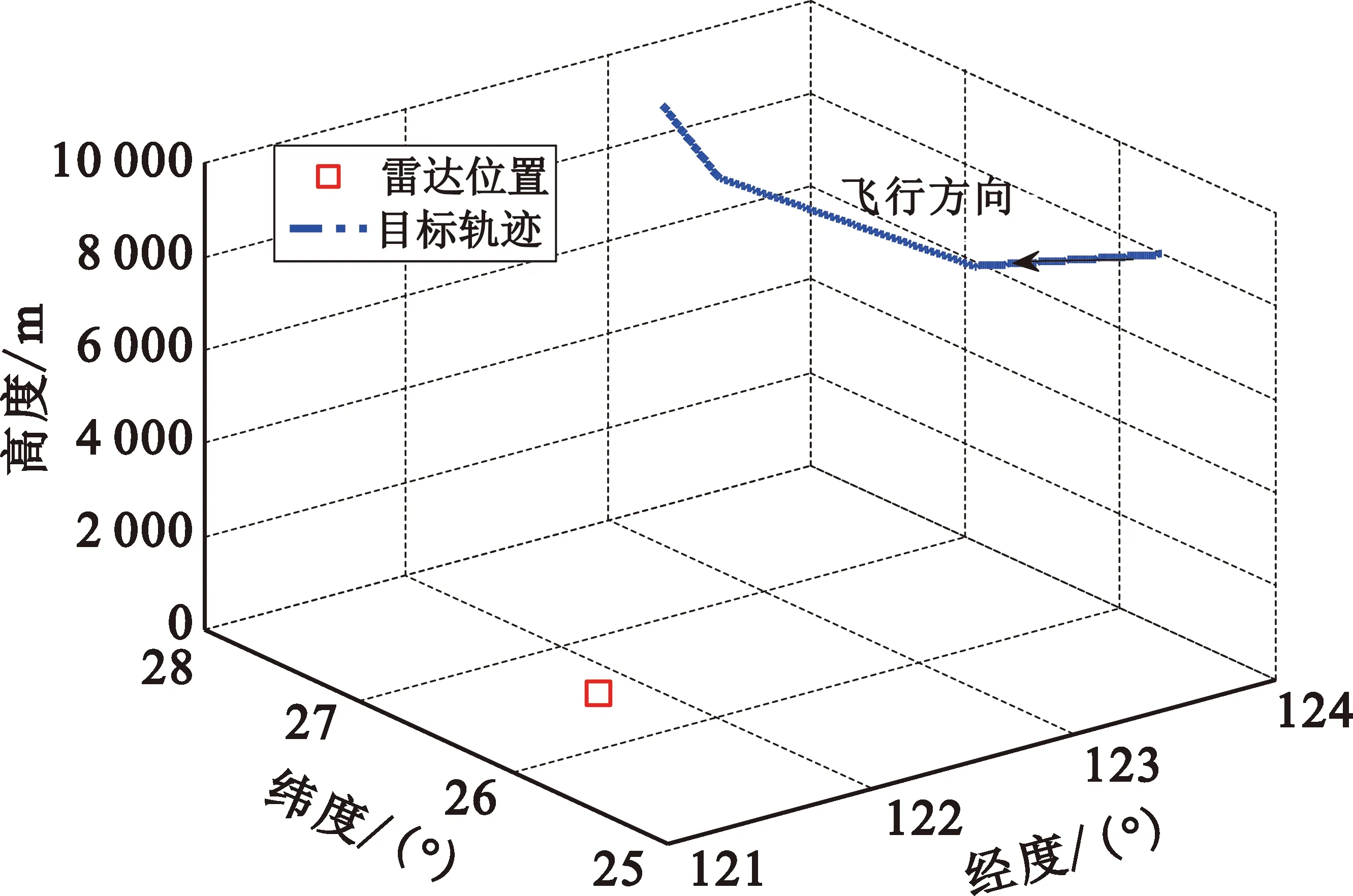
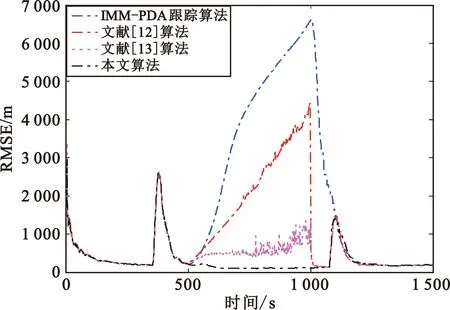
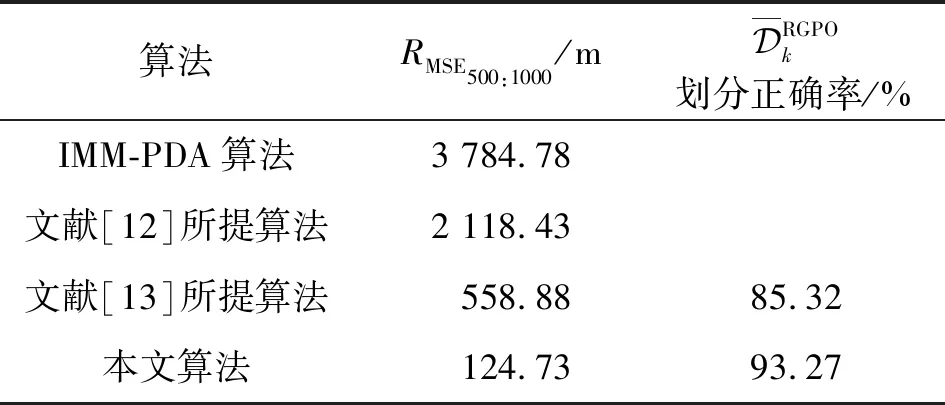
式中:bk与ek分别表示目标在k时刻方位角与俯仰角真值。那么∀i (7) (8) 另一方面,注意到RGPO干扰点迹的信噪比要比真实目标的信噪比高[10],这就意味着如果一组真假雷达点迹对通过了χ2检验,那么离雷达远的点迹比离雷达近的点迹具有更高的信噪比[12]。因此,为提高χ2检验的性能,上述特性应当整合进RGPO干扰点迹检测中。基于此,构造如下所示的信噪比结合角度的修正χ2检验: (9) 如前所述,RGPO干扰机为实现将目标脱离雷达跟踪波门的目标,RGPO干扰回波的信噪比真实目标回波信噪比高,而式(9)中信噪比参数λ即用于体现这一客观现象。文献[12]中λ取值固定为4,但在实际中,其取值应根据雷达使用环境或者目标先验知识来确定。 式(9)所示的统计检验会出现由空间杂波及虚警引起的误判。为减少此类错误,文献[11]提出将角度χ2检验结果送入M/N逻辑检验器,将此逻辑检验器的输出作为最终的RGPO干扰检测结果。文献[12]指出2/3逻辑是一种合理选择,因此本文也将式(9)所示的修正χ2检验结果首先送入2/3逻辑检验器,以该逻辑检验结果为依据判别是否存在RGPO干扰。 (10) 式中: (11) 式中:PD表示雷达的检测概率;PG表示目标出现在跟踪波门内的概率;cz=4π/3表示单位超平面的体积;[a;b,Ξ]表示高斯概率密度函数,其定义为 (12) (13) (14) (15) 直接将RGPO干扰点迹集用于更新目标航迹,会使雷达丢失目标[10]。因此,在更新目标航迹之前需基于RGPO干扰点迹集构造一个关于目标的虚拟点迹。 文献[13]及文献[14]将角度量测数据压缩与距离最近量测选取相结合来构成一个目标的虚拟点迹,但文献[20]指出距离欺骗信号会迷惑雷达对真实目标的检测,造成雷达漏掉真实目标。此时,若继续选择距离最近的量测构造虚拟点迹,雷达的跟踪性能依然会劣化。另一方面,文献[10]指出在电子对抗环境下,IMM-PDA跟踪算法仍然具有很高的跟踪精度。因此,本文选择IMM-PDA跟踪算法中的目标位置预测点与雷达之间的距离作为k时刻的距离虚拟测量值。 (16) (17) (18) (19) (20) (21) 当集合Dk只包含正常点迹时,目标航迹更新方式为 (22) 对于IMM-PDA跟踪滤波器中的任意模型Mj,其更新方式为 (23) 当集合Dk只包含RGPO干扰点迹时,目标航迹更新方式为 (24) 对于IMM-PDA跟踪滤波器中的任意模型Mj,其更新方式为 (25) 当集合Dk同时包含正常点迹和RGPO干扰点迹时,目标航迹更新方式为 (26) 对于IMM-PDA跟踪滤波器中的任意模型Mj,其更新方式仍为式(22)所示方式。 需要说明的是,虽然RGPO干扰点迹集的距离量测错误较大,但却提供了一组相对准确的方位角和俯仰角量测量值。式(16)与式(17)将这组角度测量值融合为一条测向线,再结合式(18)所示的距离虚拟测量,可将RGPO干扰点迹集转换为特定目标的雷达虚拟点迹。基于虚拟点迹,采用IMM算法可得目标在k时刻位置信息,如式(21)所示。为了充分利用雷达点迹信息以提高跟踪精度,可采用协方差交叉法[15],融合两类点迹集估计得到的目标位置,如式(26)所示。 综合上述讨论,本文所提的一种抗RGPO干扰的机动目标跟踪算法在任意k时刻的递推计算流程如图1所示。 图1 抗RGPO干扰的机动目标跟踪算法流程图 其具体计算步骤如下: Step2 接收数据集Dk:接收雷达在k时刻的点迹数据,并将各点迹从球坐标系转换到直角坐标系下。 为验证本文算法的有效性,将所提的抗RGPO干扰的跟踪算法与传统IMM-PDA算法、文献[12]所提算法以及文献[13]所提算法进行了性能仿真对比。性能对比指标1选取为目标空间位置均方根误差RMSEk,其定义为 (27) (28) 四种目标跟踪算法均使用了PDA滤波器,其跟踪波门参数均设置为γ=25,PG=0.999 98。上述四种算法均采用4/4逻辑法[15]来起始目标航迹,初始航迹形成后,每个子模型的初始状态均由九维状态向量初始化方法[21]估计。 考虑到机动目标的运动特性及雷达探测特性,本文采用STK软件[22]生成仿真场景。仿真场景如图2所示,模拟了一架敌机抵近侦察以及我方雷达全程监视跟踪的典型电子对抗场景。场景示意图中,黑色箭头表示敌机的运动方向,敌机运动过程持续1 500 s,包含两次机动转弯,在两次转弯之间实施RGPO干扰,即从500 s开始实施RGPO干扰,并持续到1 000 s。 图2 巡航场景示意图 场景中,杂波密度均为2×10-10个/m3,雷达检测概率PD=0.98。点迹距离测量噪声标准为200 m,方位角及俯仰角测量噪声标准为1.0°。根据场景中的雷达坐标以及场景中的目标轨迹,并结合上述杂波参数,可生成雷达探测目标后形成的正常点迹数据。此外,场景中的RGPO干扰形式同样与式(4)所示形式一致,其中参数vRGPO=130 m/s。同样假设RGPO干扰点迹回波信噪比是正常点迹回波信噪比的κ倍,其中κ~U(3,5)。按上述设置生成RGPO干扰持续期间的干扰点迹。 本文算法与文献[12]及文献[13]所提算法共同使用的参数设置为,显著性水平α=0.01,信噪比参数λ=3,逻辑检验器均使用2/3逻辑。 基于上述仿真设置,图3给出了巡航场景100次独立实验后前述四种机动目标跟踪算法的均方根误差曲线。从图中可以得出,当RGPO干扰机未开机或关机一段时间后时,本文算法跟踪精度与其余三种机动目标跟踪算法的跟踪精度相当,而当存在RGPO干扰时,本文算法的跟踪精度并不随时间明显恶化。 图3 巡航场景跟踪均方根误差曲线 采用式(28),计算k=500~1 000这段时间内参与性能对比的四种机动目标跟踪算法的跟踪性能,结果如表1所示。 表1 RGPO干扰条件下的跟踪性能 针对RGPO干扰下机动目标跟踪误差增大的问题,本文提出了一种基于雷达点迹处理的机动目标跟踪算法。仿真结果表明,本文算法的跟踪精度明显优于传统的IMM-PDA算法及其现有抗RGPO干扰跟踪算法的跟踪精度。 对于干扰方来讲,可以采用不同的拖引速度与拖引加速度,因此在后续研究过程中,我们将考虑拖引速度与拖引加速度的影响,进一步完善抗RGPO干扰跟踪算法。

2.3 基于正常点迹集的航迹更新





2.4 基于RGPO干扰点迹集的航迹更新







2.5 状态融合与递推更新




2.6 抗RGPO干扰的机动目标跟踪算法



3 仿真分析


4 结束语
