基于粒子滤波的电力机械设备状态在线监测
2023-03-01田祥雨
吴 威,高 骏,田祥雨
(国网江苏省电力有限公司,江苏 南京 210024)
0 引言
电力机械设备是配电网的重要组成部分,电力机械设备的正常运行是保障人们生产生活顺利进行的基础。但电力机械设备在长期运行过程中难免会出现不同程度的故障[1-2],轻则造成配件损坏,重则影响输电线路的正常供电。为此,对电力机械设备的运行状态进行监测十分有必要。
当前,许多学者针对电力机械设备运行状态提出监测方法,如徐红辉[3]使用主成分分析算法计算机电设备的主特征向量,依据该特征向量分析其运行是否正常;穆锦标等[4]提出了自供电机械设备状态监测方法。上述2种方法在实际应用过程中受电力设备运行过程中产生的噪声干扰影响,使其监测效果不够理想。为此,本文提出基于粒子滤波的电力机械设备状态在线监测方法。
1 电力机械设备状态在线监测方法研究
1.1 基于人工萤火虫群优化的粒子滤波算法
为提升电力机械设备状态的在线监测效果,本文设计了一种基于人工萤火虫群优化的粒子滤波算法,通过优化后的粒子滤波算法实现其状态的在线监测。
粒子滤波算法(particle filter,PF)又称序贯蒙特卡罗算法,其核心思想是以状态空间内存在的随机样本计算后验概率密度函数并求取近似该样本均值替代的积分计算[5],并依据该计算结果获得该状态空间估计的最小方差,实现目标状态估计的目的。但粒子滤波算法在积分计算过程中,为规避粒子匮乏情况发生会放弃最小权值粒子集,导致粒子多样性受损[6],估计结果不够准确。为保障粒子滤波算法在估计目标状态时权值较大的粒子位置不变,使用人工萤火虫群算法对其进行改进,其过程如下所述。
令k表示时刻,i和j分别表示粒子。粒子i向粒子j靠近的概率为
(1)
Rij(k)为粒子权重差值,该数值越大表明粒子i向粒子j靠近的概率越大;dij(k)为欧氏距离。
利用式(1)可将具备较低权值的粒子转移到高似然区间,为保障粒子集质量,设置粒子转移优化阈值,其表达式为:
(2)
(3)

依据人工萤火虫群算法内萤火虫移动更新规则更新粒子在k+1时刻的位置,其表达式为
(4)

依据上述粒子移动概率、优化阈值和粒子位置更新方法,利用人工萤火虫群改进粒子滤波算法详细步骤如下:

c.依据式(2)的粒子转移优化阈值对符合条件的粒子进行优化处理。当存在a个粒子被放置于抛弃组内时[9],则直接复制该组映射的高权值粒子并优化N-(m+a)个粒子,此时粒子域变更为
(5)
d.利用式(4)将优化后的粒子与其对应的高权值粒子合并处理得到新的粒子集,其表达式为
(6)
e.将高权值粒子集、复制的粒子集和更新后的粒子集合并处理,得到新的粒子集,该粒子集可作为状态估计的输入,其表达式为
{Ufinal}={{UH},{UP},{UO}}
(7)
通过上述步骤可有效规避粒子滤波算法的粒子匮乏情况,为实现电力机械设备状态在线监测奠定基础。
1.2 电力机械设备振动信号在线监测
1.2.1 电力机械设备振动信号随机子空间状态方程构建
电力机械设备在运行过程中其振动具备非线性特点,需对其振动的时域信号进行分割处理[7-8],得到线性的振动信号。在此利用随机子空间算法(SSI)构建粒子人工萤火虫群改进粒子滤波算法所需的状态方程,其过程如下所述。
令Xk∈Rn和Yk∈Rl分别表示k时刻的电力机械状态量和输出量,构建电力机械振动随机子空间线性状态空间模型,其表达式为
(8)
wk、vk分别为k时刻的电力机械振动状态量与输出量的噪声;B、C分别为电力机械振动状态矩阵和输出矩阵,描述该电力机械的动态行为[10-11]。
求解式(8)即可得到电力机械设备振动的随机线性状态空间表达式。求解过程如下:
a.正交投影。令电力机械设备振动的量测数值组成的分块Hankel矩阵为S,其表达式为
(9)
Sp、Sf均为分块Hankel矩阵。其中,Sp的维数为i×N,Sf的维数为j×N+N。
对式(9)进行重新分块处理,其表达式变更为
(10)

令ρm表示正交投影,利用Sp接收Sf的正交投影,则式(9)的正交投影表达式为
(11)
(12)
b.奇异值分解。对式(11)和式(12)结果进行奇异分解处理获得其可观测矩阵,即
(13)

(14)
(15)
U1、V1分别为酋矩阵;S为对角矩阵。
电力机械振动信号状态变量数值表达式为
(16)
c.计算电力机械设备振动信号观测矩阵B和输出矩阵C。将式(15)和式(16)结果代入到式(8)中,则存在
(17)
ρw、ρv分别为残差向量,该向量可使用最小二乘法定义[12-13],并依据该定义数值即可得到精确的电力机械设备振动信号观测矩阵和输出矩阵数值,为电力机械设备振动状态在线监测提供实时数据。
1.2.2 电力机械设备振动信号在线监测流程
依据获取到的电力机械设备振动观测矩阵和输出矩阵数值,使用改进粒子滤波算法对电力机械设备振动信号进行在线监测,其过程如下:

a.对第k段电力设备振动信号进行随机子空间计算,获得该段信号的振动观测矩阵和输出矩阵数值并将其看作模态参数,由M(k)表示。
b.依据模态参数M(k)建立电力机械设备当前振动状态矩阵B(k)和输出矩阵C(k)。并利用式(15)和式(16)计算粒子滤波状态序列和电力机械振动状态变量数值。
c.依据粒子滤波状态序列和电力机械振动状态变量数值,建立改进粒子滤波算法的滤波器,使用该滤波器对第k段信号进行滤波处理,得到无噪声干扰的电力机械振动信号,其表达式为
(18)

d.使用改进粒子滤波算法对电力机械振动信号观测矩阵进行重采样处理,计算电力机械振动信号观测矩阵内每个信号对应的粒子权重系数为
(19)

对式(19)进行归一化处理后获取到电力机械振动信号观测矩阵内每个信号对应的粒子的权重概率,依据该权重概率选取改进粒子滤波的监测数值。
e.令L表示电力机械振动信号监测步长,计算监测信号和采集信号的差值并设置电力机械振动的振幅阈值E,当监测信号和采集信号的差值大于该阈值时,则向用户发出电力机械设备状态异常告警[14-15]。
2 实验分析
以某水电站为实验对象,使用振动传感器采集该水电站电力机械设备实时振动信息。依据水电站电力机械设备运行环境和其实时振动信息,使用MATLAB软件模拟其运行环境。在MATLAB仿真软件内设置本文方法监测噪声方差数值分别为0.03和0.08,在该监测环境下,使用本文方法监测该水电站电力机械设备振动情况,绘制其原始信号和改进粒子滤波信号分布,如图1所示。
分析图1可知,当噪声方差数值较小时,水电站电力机械设备振动信号与改进粒子滤波后的信号波动幅值较小, 且初始的电力机械设备振动信号与改进粒子滤波后的信号分布较为紧密。当噪声方差数值较大时,电力机械设备初始信号和改进粒子滤波后的信号振动幅值波动区间增加明显,其中电力机械设备初始信号分布较为分散。而经过改进粒子滤波后的信号分布较为平滑且紧密。从上述结果说明,经过改进粒子滤波后的电力机械信号受噪声方差数值影响较小,信号分布曲线虽然存在起伏但整体分布较为紧密。可充分看出本文方法在监测电力机械设备振动状态时受噪声方差影响较小。

图1 不同噪声方差情况电力机械设备振动信号分布
振动状态信号跟随是衡量本文算法监测精度的指标之一。测试在不同噪声方差情况下,本文算法跟随电力机械设备振动幅值,结果如表1所示。
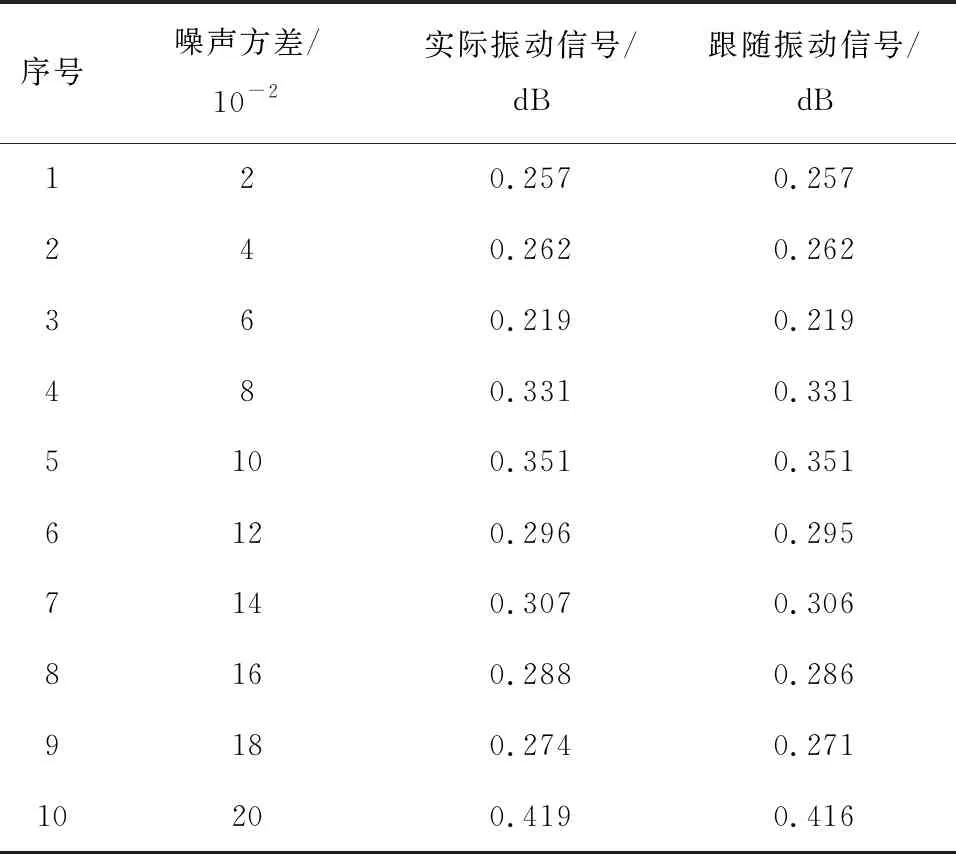
表1 振动状态信号跟随结果
分析表1可知,本文方法跟踪电力机械设备实际振动信号时其跟随数值随着噪声方差的增加而降低。但在噪声方差数值为10×10-2之前时,本文方法跟踪的振动信号与实际振动信号完全相同。随着噪声方差数值的增加,本文方法跟踪的振动信号与实际振动信号出现偏差,但偏差数值较小。在噪声方差数值为20×10-2时,本文方法跟踪电力机械设备振动信号最大偏差数值仅为0.003 dB。上述结果说明,本文方法跟踪电力机械设备振动信号较为准确,从侧面说明其在线监测能力较强。
在仿真软件内模拟水电站电力机械设备正常运行和异常运行状况,使用本文方法对其振动进行监测并绘制振动信号模拟数值与电力机械设备振动稳定域分布情况,结果如图2所示。
由图2a可知,电力机械设备正常运行时,其振动信号模拟值均位于稳定域分布范围内, 且振动信号模拟值分别较为密集。而在图2b内,电力机械设备异常运行时,振动信号模拟值在3个稳定域内分布较为分散的同时,存在部分振动信号模拟值位于稳定域边缘或外部位置。该情况说明此时电力机械设备振动高于其振动阈值,发生异常运行情况。综上所述,本文方法可有效监测电力设备振动异常。

图2 电力机械设备不同运行状况振动信号模拟值分布
为更清晰呈现本文方法对电力机械设备异常振动监测性能,依据图2的电力机械设备运行状况,绘制其振动特征离散度曲线分析其监测能力,结果如图3所示。

图3 电力机械设备不同运行状况振动特征离散度曲线
分析图3可知,当电力机械设备正常运行时,其振动信号的振动幅值波动区间较小且数值均在所设的振动阈值之下。当该电力机械设备发生异常时,其振动信号波动区间较大的同时,部分异常振动信号峰值已超过所设的振动阈值。上述情况表明,本文系统可有效监测电力机械设备发生异常振动时振动信号波动情况,具备较好的应用性。
3 结束语
本文提出基于粒子滤波的电力机械设备状态在线监测方法,该方法使用人工萤火虫群算法对粒子滤波算法进行了改进,并使用改进后的粒子滤波算法构建滤波器,去除电力机械设备振动信号内存在的干扰噪声。仿真实验表明,本文方法受电力机械设备噪声方差影响较小,且可有效监测电力机械设备异常振动情况,具备良好的应用效果。