基于机器视觉的直升机旋翼桨尖挥舞量测量系统设计
2023-03-01张育斌陈垚锋程起有熊邦书
乐 娟,张育斌,陈垚锋,陈 焕,程起有,熊邦书
(1.中国直升机设计研究所,江西 景德镇 333000;2.南昌航空大学江西省图像处理与模式识别重点实验室,江西 南昌 330063)
旋翼是直升机最具特色的核心部件,为直升机飞行提供所需的升力和推进力[1]。对旋翼桨叶运动参数进行测量,不仅可以为旋翼系统设计提供可靠的试验数据,还可以实现旋翼系统的性能评价。桨尖挥舞量是旋翼桨叶运动参数的重要组成部分,如何对桨尖挥舞量进行快速、准确的测量,进一步提升旋翼试验品质,为直升机旋翼设计和健康状态监测提供可靠的试验数据,已成为近年来国内外直升机旋翼试验领域的重要研究方向[2-4]。
目前直升机旋翼桨尖挥舞量测量方法主要包括:①激光位移测量法[5]。该方法在理论上具有较高的测量精度,但是在实际测量过程中操作复杂,调试过程烦琐。②应变测量法[6]。该方法所需试验设备简单,但是存在静态标定过程复杂,动态测量与静态标定环境的不一致对测量结果的可信度影响较大的问题。③光栅投影法[7]。该方法所需试验设备少,实现过程简单,但是桨尖挥舞量测量结果的准确性取决于测试环境和光栅投影的安装位置。
近年来,随着计算机技术和数字图像处理技术的迅速发展,机器视觉技术在工业几何测量领域得到了广泛的应用[8]。基于机器视觉的测量技术具有非接触、测量速度快、对测量对象干扰小的特点,采用机器视觉测量技术可以实现直升机旋翼桨尖挥舞量实时测量,提高测量的自动化程度。
1 系统总体方案
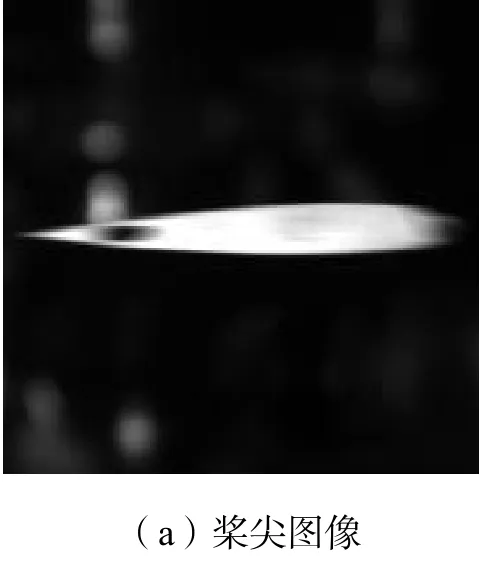
直升机旋翼桨尖挥舞量测量系统的总体方案如图1 所示。当旋翼桨叶旋转到角度传感器所在方位时,角度传感器会产生一个TTL 信号,为获取不同桨叶的桨尖挥舞量,将信号经倍频同步转换器倍频处理,然后触发安装在130°方位的相机采集桨尖图像,为了使相机在低曝光条件下能够拍摄到清晰的桨尖图像,将高频摄影灯固定安装在相机的同一方位,水平照射贴有反光片的桨尖区域,增加相机采集桨尖图像时的进光量。计算机与相机之间采用千兆光纤进行连接来实现桨尖图像数据实时传输,通过检测桨尖气动中心在桨尖图像中不同时刻高度的像素坐标偏移距离,结合相机标定结果可以计算得到实际的桨尖挥舞量。
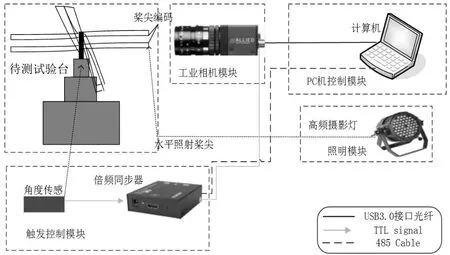
图1 桨尖挥舞量测量方案图
2 硬件设计
直升机旋翼桨尖挥舞量测量系统硬件部分主要由工业相机、摄像头、倍频同步转换器、计算机以及高频摄影灯组成,可以实现旋翼高速旋转状态下的桨尖图像采集,并将桨尖图像数据传输到计算机中进行保存。
2.1 工业相机的选型
工业相机的选型既要考虑安装位置和图像采集范围等因素,又要考虑系统对测量精度和数据传输速率的要求。因此,系统选用了型号为IDS UI-3140CP-MGL_Rev_2 的高速工业数字单目相机。工业相机固定安装在距离桨尖10 m 的位置,视场范围大小为1 200 mm×980 mm,最高分辨率为1 280×1 024,每个像素代表的实际大小要小于2 mm,满足桨尖挥舞量测量精度不超过±2 mm 的要求。相机的帧率为169 帧/s,具有USB3.0 接口,可以实现桨尖图像实时采集和传输。
2.2 摄像头的选型
相机固定位置距离桨尖为10 m,由于桨尖上下偏移的范围在400 mm 左右,并且相机视野边界附近存在畸变,所以相机视野高度取880 mm 左右比较合适,将上述参数代入公式(1),通过计算可以得到焦距f,根据计算结果选取f=50 mm,型号为PENTAX H1214-M 的摄像头。
式(1)中:L为相机与待测物的距离;Lc为相机的光学靶面高度;Lview为相机的视场宽度。
2.3 计算机的选型
计算机是整个测量系统的控制中心,主要负责接收桨尖图像数据、分析处理桨尖图像数据和网络传输等功能。因为工业相机的接口是USB3.0,为了不降低桨尖图像数据传输速率,所选用的计算机包含USB3.0接口,通过50 m 混合有源光缆与相机进行连接。系统选用的计算机的操作系统为Window7,处理器为Intel Core i7,内存为8 G,硬盘空间为2 T,满足桨尖图像数据的存储要求,能够快速地处理图形运算工作。
3 软件设计
直升机旋翼桨尖挥舞量测量系统软件是基于Window 操作系统下的Visual Studio 2013 平台实现的,测量系统主界面如图2 所示。
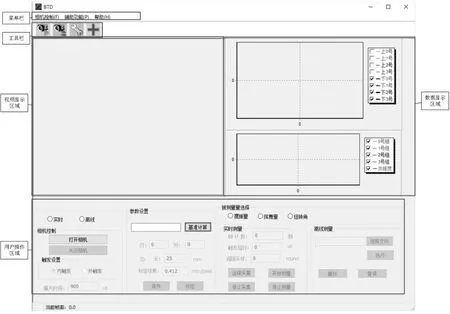
图2 桨尖挥舞量测量系统主界面
首先利用工业相机自带的软件开发工具包(Software Development Kit,SDK)实现工业相机控制以及参数设置,通过自行开发的SDK 实现对倍频同步转换器的控制与参数设置,然后采用工业相机SDK 函数获取桨尖图像,接着使用C++语言基于OpenCV 编写了桨尖图像信息处理程序,从而实现计算机视觉标定、桨尖气动中心定位和桨尖挥舞量计算等功能,最后将桨尖挥舞量计算结果显示在测量系统主界面中的数据显示区域。
3.1 计算机视觉标定
通过对桨尖图像数据进行处理,可以获取桨尖气动中心在桨尖图像中不同时刻高度的像素坐标偏移距离。为了得到实际的桨尖挥舞量,需要知道实物尺寸与像素的比例关系,因此本系统采用基于棋盘格的单目视觉标定方法[9]进行计算机视觉标定,标定步骤如下:①采集棋盘格标定图像;②对棋盘格标定图像进行中值滤波,减少噪声干扰;③采用Harris 角点检测算法[10]对棋盘格角点进行检测,再使用基于最小化误差的亚像素级角点检测方法对角点进行精准检测;④若棋盘格检测出m×n个角点,则有(m-1)×(n-1)个棋盘格方格被检测出来,邻近的两个棋盘格角点间的像素距离表示方格边长的像素距离,由于棋盘格方格的实际尺寸是已知的,因此可以获得单位像素所代表的实际长度,从而完成计算机视觉系统的标定。
3.2 桨尖图像的处理
旋翼桨尖挥舞量是根据桨尖气动中心偏移量计算得到,因此需要对桨尖气动中心进行定位。桨尖气动中心位于桨尖弦线的3/4 位置,为了定位桨尖气动中心,应该先确定桨尖弦线的位置。本系统首先采用大津法[11]对桨尖图像进行二值化,然后利用得到的二值化图像求取最大连通区域,实现桨尖区域定位,最后计算最大连通区域的最小外接圆,因为计算得到的最小外接圆与桨尖区域的两端相交,所以可以根据最小外接圆的位置来获得桨尖弦线的位置,通过桨尖气动中心点与桨尖弦线长度的比例关系能够得到桨尖气动中心点的像素坐标。桨尖气动中心定位过程示意图如图3 所示。
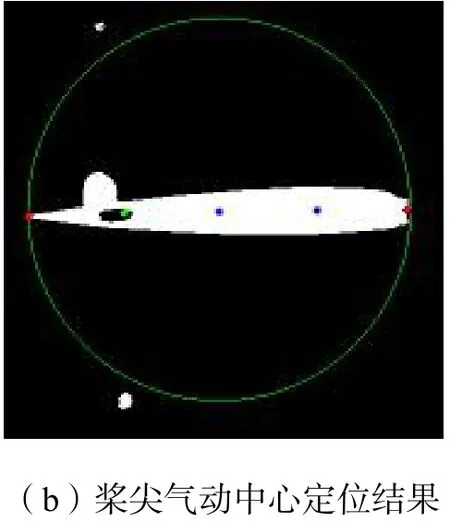
图3 桨尖气动中心定位过程示意图
对于参考状态高度方向的像素坐标偏移距离,结合相机标定结果和像素坐标偏移距离能够计算得到桨尖挥舞量。假设试验操纵参数为p1时,旋翼0~4 号桨叶桨尖气动中心不同时刻高度的像素坐标为Uij,其中i表示不同时刻的运动状态,j表示桨叶的编号;U0j为旋翼桨尖气动中心在参考状态时高度方向的像素坐标,其中0 表示参考状态,则在操纵参数为p1时,旋翼桨尖在不同时刻相对参考状态的位移量ΔUij为:
式(2)中:d为单位像素所代表的实际长度。
4 试验结果与分析
4.1 标定结果分析
为验证本系统采用的标定方法的精度,在旋翼桨尖位置采用7×10 的棋盘格进行计算机视觉标定,标定结果如图4 所示。
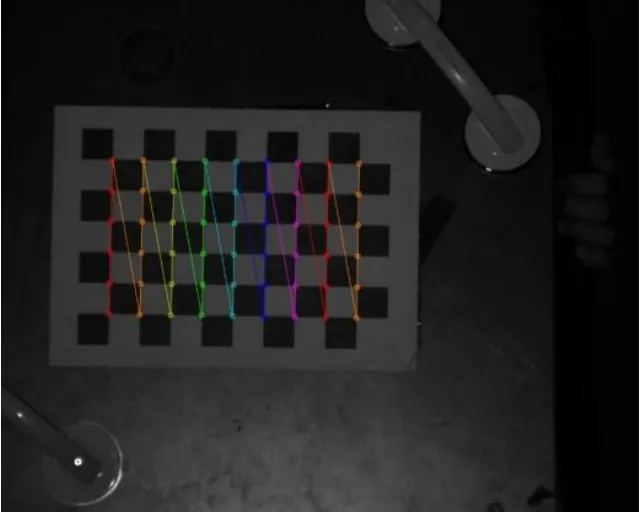
图4 棋盘格图像标定结果
从图4 中可以看出,本系统采用的标定方法能够检测出棋盘格中的所有角点,通过获取相邻的两个棋盘格角点间的像素距离得到方格边长的像素距离,结合标定值计算出棋盘格方格边长的测量值。棋盘格标定板方格的实际边长为25 mm,以图像中左上角的角点为起始点,将每个方格4 条边的平均计算值作为方格边长的测量值,检测出的5×8 个方格边长的测量值与真值的误差,如表1 所示。从计算结果来看,棋盘格标定误差值都在±0.5 mm 范围内,满足桨尖挥舞量测量的设计要求。

表1 棋盘格标定误差
4.2 桨尖位移量测量结果分析
采用直径为4 m 的旋翼模型进行风洞试验,测量不同转数、总距和纵向周期变距状态下的桨尖挥舞量。为保证数据可靠性,减少偶然误差,旋翼每个状态重复采集100 张桨尖图像,将相同状态下的桨尖气动中心点的像素坐标进行平均计算,结合标定值得出桨尖挥舞量。
4.2.1 不同转速和总距角的桨尖挥舞量
转速为778 r/min 和900 r/min 时,总距角为0°、2°、4°、6°、8°、10°,纵向周期变距为0°状态下,130°方位的桨尖挥舞量如图5 所示,图中横坐标表示总距角,纵坐标表示桨尖运动时相对总距角为0°的桨尖挥舞量。
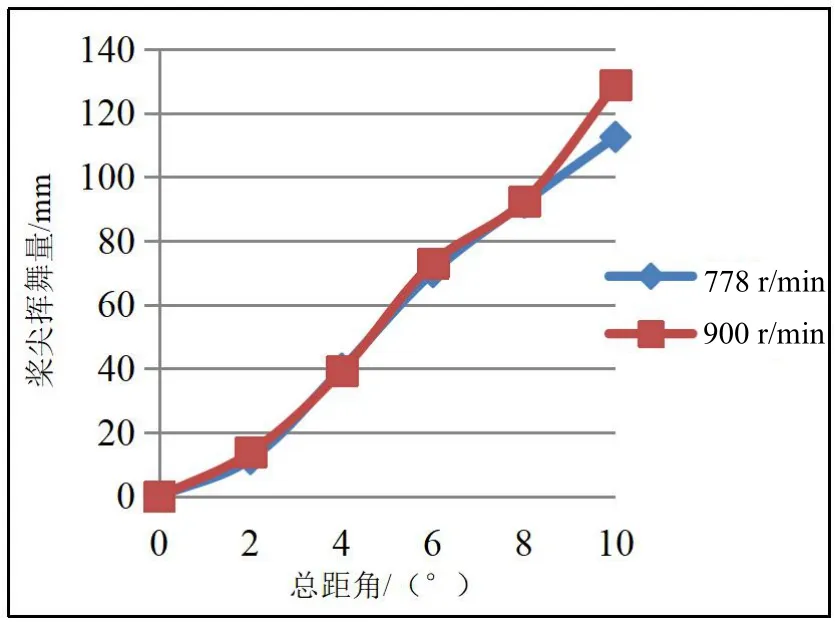
图5 不同转速和总距角的桨尖挥舞量
从图5 可以看出,在转速和纵向周期变距角相同的情况下,桨尖挥舞量随着总距角的增大而增大,总距角越大,桨叶受到的升力越大,因此桨尖挥舞量越大。
4.2.2 不同转速和纵向周期变距角时的桨尖挥舞量
在上述相同的转数下,测量总距角为6°,纵向周期变距角为0°、1°、2°、3°、4°状态下130°方位的桨尖挥舞量,结果如图6 所示,图中横坐标表示纵向周期变距角,纵坐标表示桨尖运动时相对纵向周期变距角为0°的桨尖挥舞量。
由图6 可以看出,在转速和总距角相同的情况下,桨尖挥舞量随着纵向周期变距角的增大而增大,产生这种现象的原因是纵向周期变距角增大时,该方位桨叶整体向下挥舞加大,因此桨尖挥舞量不断增大。
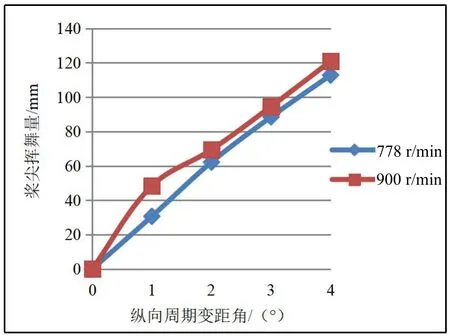
图6 不同转速和变距角的桨尖挥舞量
5 结论
文中基于机器视觉技术设计了直升机旋翼桨尖挥舞量测量系统,并对测量系统的硬件和软件功能、结构进行了详细描述。从试验结果可以看到,系统的最大标定误差不超过±0.5 mm,可以实现不同转速、总距和纵向周期变距角状态下的桨尖挥舞量测量。基于机器视觉的直升机旋翼桨尖挥舞量测量系统的提出与完成,给桨叶运动参数测量的研究提供了新的思路和方向,为中国自主研发直升机的旋翼设计、健康监测和性能评价提供可靠依据。