小型海洋碳排放测量船的结构设计*
2023-03-01陈佳威陈婧鑫
陈佳威,林 建,陈婧鑫,孟 巧
(南通理工学院电气与能源工程学院,江苏 南通 226002)
世界许多国家工业的崛起促进了经济发展,但同时也产生了一些负面的影响,比如说碳的排放。工业碳排放污染也在早些年就已经进入了人们的视野中,相当多的国家都有开始对陆地碳排放进行监测,从而研究改善碳排放污染的方法。但现在随着世界经济的全球化发展,贸易往来增多,航运已经成为进行贸易往来的主要方式之一,这也引起了人们对海洋的一些关注[1-3]。除此之外,人们对海洋资源的探测也促进了对海洋环境的监测。其中碳排放不仅严重影响着陆地的大自然环境,对海洋也有着非常大的影响,那么现在就需要一种海洋测量船来监测海洋环境。海洋碳排放如今也颇为严重,包括海上航行的船舶主机燃料燃烧释放和随大气循环到海洋环境中去的二氧化碳等温室气体[4]。海洋中碳的存在形式更多是以二氧化碳化合物或者碳酸盐的形式,所以,对海洋碳排放的测量尤其是对温室作用气体——二氧化碳的测量在目前关注全球环境变化的大背景下具有非常大的意义。同时为了能够顺利实现理想监测的目的,本文设计一种小型无人海洋碳排放测量船。
1 海洋碳排放测量船的结构设计
1.1 整体思路设计
本次设计的海洋碳排放测量船模型主要由船体、电池和太阳能混合动力系统、碳排放监测系统三大部分组成。其中动力系统采用锂电池供电,同时可以利用太阳能充电来提高供电效率和实现节能减排。碳排放监测系统包括二氧化碳监测模块、高分辨率摄像头、超声波避障模块、多波束探测仪及GPS 系统。船舶依靠GPS 实时定位,利用超声波避障模块进行避让工作,从而使船舶处于安全航行范围,使用高清摄像头、二氧化碳监测模块针对作业水域的二氧化碳排放量进行监测,同时利用多波束探测仪完成多作业任务,如水文或者气象监测等。
1.2 模型设计
项目团队设计的小型无人海洋碳排放测量船为双体结构,它不仅可以减小船舶行驶阻力,还能够保证船舶在水面的稳定性。考虑到模型的易制作和防水性,双体船片体和平台采用桐木板加玻璃钢材质。上层建筑成圆环形状,采用透明的亚克力圆管制作,这样便于观察监测系统的工作。上层建筑顶部及平台敷设太阳能电池板以便利用太阳能给锂电池系统充电。具体模型如图1 所示。

图1 小型无人海洋碳排放测量船三维模型图
本船模型采用太阳能、锂电池供电系统,具体如图2 所示,太阳能电池是为船模电动推进系统提供电能的光伏发电部件。锂电池和电池保护板是太阳能光伏发电的储能装置,太阳能电池产生的电能输送到锂电池储存起来,为船模动力系统提供电能。
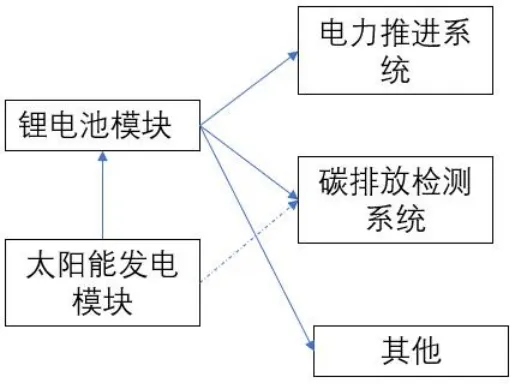
图2 太阳能、锂电池发电系统
本项目中碳排放检测系统主要任务是进行水面工作区域的碳排放测量工作,所采用的二氧化碳监测模块可测量的二氧化碳质量分数量程为0.04%~0.5%,总挥发性有机物质量分数量程为0%~0.1%,测量精度满足工作需要。
1.3 航行系统设计
由于海洋碳排放测量船对相关信息的采集是沿着指定的航线进行的,在航行过程中测量船如果受到诸如风、浪、海流等外界因素的影响,会偏离预先设定的航行路线,从而导致测量的相关数据会有一定的误差[5]。面对这种情况,项目团队采用了海洋碳排放测量船的航迹保持系统,使船舶在工作的过程中可以对其进行实时调节,实现船舶控制的智能化、自动化,使本测量船尽可能地保持在指定区域作业,从而达到精确测量的目的。本船舶实现航迹保持的示意图如图3所示,图中虚线L 代表测量船航行的目标测线,L 与方向N(正北)一致,在轨迹过程中用箭头线α的方向来代替船舶实际航行的方向,箭头线K 为目标方向,与L 一致,指向正北,ψ为K 与α之间的夹角,表示的是偏航角。
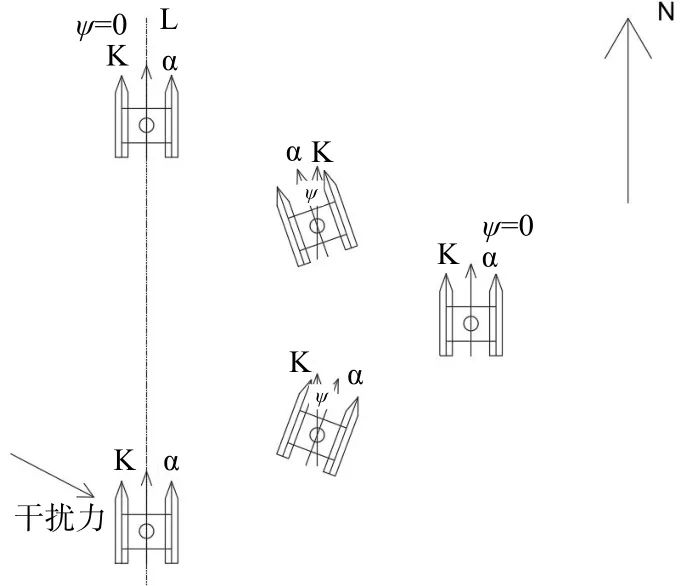
图3 海洋碳排放测量船航迹保持示意图
船舶开始航行时沿着固定航线L 以及目标航向K前进,当受到外界干扰力的作用后船舶驶离计划航线,出现偏航,此时产生一个偏航角ψ。为了完成航行任务要求船舶快速返回计划航线,此时船上的航迹保持系统开始工作,需要不断地对船舶的航向进行调整,该过程中船舶由于惯性力以及干扰力的持续作用,产生的偏航角在航迹保持系统的作用下逐渐减小,最后变为0,此时船的实际航向与计划航向一致,实现了船舶的航向保持。从图3 中可以看到,虽然船舶的航向与计划保持一致,但是船舶出现了一定的偏航距离,为了驶回原定航线L,航迹保持系统将继续调整。给定船舶一个与前一阶段相反偏航角ψ,然后在舵角的“指引”下逐渐回到预定航线L 上,此时的实际航向K 与计划航向L 重合,最终实现对船舶的航迹控制。
2 海洋碳排放测量船的结构有限元分析
随着计算机和有限元软件的高速发展,越来越多的工程都采用有限元方法进行分析[6],本文基于ANSYS workbench 有限元对设计模型进行结构分析。
2.1 有限元法的基本步骤介绍
利用有限元法进行结构分析大致可分为前处理、数值分析和后处理3 个阶段[7]。
前处理阶段是根据所研究的船体结构的几何数据、图形进行准确分析,依次构建有限元模型,即根据计算所需的有限元单元类型、疏密程度进行网格的划分,生成有限元模型数据,为下一步进行有限元分析做准备。在这一阶段所构建的有限元分析模型的质量是进行有限元分析的关键。
数值分析阶段主要分为单元分析、整体分析、方程组求解3 个方面,此阶段是利用有限元法进行结构分析的核心部分[8]。单元分析主要为了找出单元节点力和节点位移的关系式,具体如下:
式(1)中:Ke为单元刚度矩阵;δe为单元的节点位移向量;Fe为单元的节点力向量。
在单元分析结束建立了单元刚度方程后,就可以进行整体分析,即把各个单元的刚度方程集合起来,形成整体的刚度方程,具体如下:
式(2)中:K为整体结构的刚度矩阵;δ为整体节点位移向量;F为整体载荷向量。
在求解器完成数值计算后,进入有限元的后处理阶段。这一阶段主要就是对有限元法求得的解进行加工处理、编辑组织,转换成可视化图形显示与输出,让人更直观地观察到所计算的现象,方便后续的有限元分析工作。
2.2 有限元模型建立
本项目所设计的船模形状较简单,因此可以直接在ANSYS 有限元分析软件中利用SpaceClaim 前处理模块进行快速建模,从而获得船体三维几何模型。为了方便计算,在建模的过程中忽略了筋板、开孔等细节。
几何模型完成之后,就要进行网格划分,这样便于后续的有限元计算。网格划分直接影响计算的精度,因此很重要[9]。为了满足计算要求,本次网格采用Method 方法绘制,Sizing 设定为2 mm,网格质量满足计算要求,最终网格单元数目为43 406,网格详情如图4 所示。

图4 网格划分图
2.3 边界条件设置
船体在水面自由航行时是不受约束的,为了消除船体的刚性位移,需要对船体施加相应的约束条件[10]。本文中选取船艏、艉两端区域点施加自由度约束,这样可以避免静力不平衡而导致的计算误差。由于无人海洋碳排放测量船只有自身的重量和装载设备时的重量,因此选取额定载重量出港一个工况进行计算。此外,模型试验阶段仅在工况较好的状态下试航,所以不考虑波浪载荷的影响,只考虑船舶在静水中航行的情况,即船舶只承受静水压力。
2.4 有限元分析
通过相关规范计算,得出静水载荷1.96 MPa,船体额定载重200 N,代入Workbench 中计算,应力结果云图和位移结果云图分别如图5 和图6 所示。
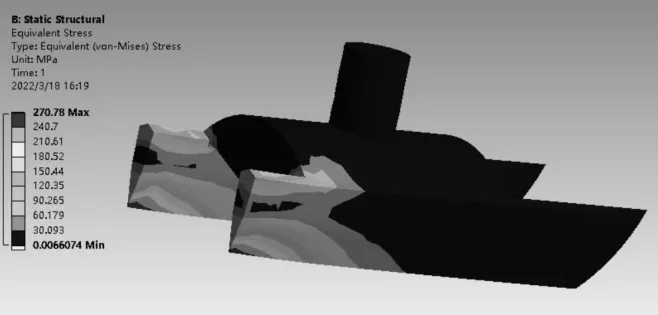
图5 应力云图

图6 位移云图
根据位移云图可知最大变形为1.66 mm,应力较大的区域主要分布在双体船片体尾部的上下两面,其中最大单元应力出现在双体船片体底部,为270.78 MPa,船体其余部位应力值都比较小,所有的应力值都小于材料的屈服应力,因此强度满足要求。
3 结论
本文首先对小型无人海洋碳排放测量船进行结构设计,然后利用ANSYS 有限元软件针对船体进行有限元计算,针对静水工况进行分析,计算结果可以得到船体结构强度满足使用要求。不足之处在于讨论工况单一,在今后工作中要进一步针对本船模进行结构优化。
