三维可视化技术联合机器人肾部分切除术在肾内生性肿瘤治疗中的应用
2023-03-01郑满堂崔振宇马涛安丰郭景阳范粱韩树刚杨文增
郑满堂 崔振宇 马涛 安丰 郭景阳 范粱 韩树刚 杨文增
腹腔镜肾部分切除术(laparoscopic partial nephrectomy,LPN)疗效与根治性肾切除术(radical nephrectomy,RN)无明显差异,是目前治疗肾肿瘤最常用的手术方式,在临床上已得到广泛的应用[1]。与传统腹腔镜手术相比,达芬奇机器人手术系统有很大的改进,其主要优势包括高清晰的3D成像系统、可以过滤人手的生理震颤和多个多关节灵活稳定的机械臂等,有利于肾肿瘤的精准切除和创面的缝合[2]。当肿瘤或病变位于器官深部时,例如肾内生性肿瘤,在手术中通常很难定位[3-4]。在三维可视化技术重建的肾肿瘤三维模型中,肿瘤和肾血管系统呈实质状态,而肾脏呈半透明状态,这为理解肾内生性肿瘤等复杂肾肿瘤的解剖特征提供了很大的便利[5-7]。三维可视化技术与机器人手术的结合为泌尿外科医师提供了有力的工具,帮助医师实现术前规划和术中导航,最大程度减少对肾功能的损伤。基于此,本研究将三维可视化技术与达芬奇机器人手术系统相结合,旨在探讨其在肾内生性肿瘤治疗中的临床应用效果。
1 对象和方法
1.1 对象 选取2021年3至11月河北大学附属医院收治的肾内生性肿瘤患者25例为研究对象,其中男12例,女 13 例;年龄 29~68(50.5±2.5)岁;BMI 20.05~27.14(24.01±1.80)kg/m2;左侧14例,右侧11例;肿瘤直径1.1~6.4(3.7±0.9)cm;TNM 分期:T1aN0M016 例,T1bN0M09 例;R.E.N.A.L.评分8~11(9.1±1.3)分;术前血肌酐57.1~97.2(80.3±8.9)μmol/L。所有患者均经评估符合手术适应证,并签署知情同意书。本研究经医院医学伦理委员会批准。
1.2 三维可视化技术 术前患者行肾平扫+增强CT检查和肾动脉CT造影(CT angiography,CTA)检查(图1),CT图像以医疗数字影像传输协议(digital imaging and communications in medicine,DICOM)格式导出并发送给医学图像重建工程师,该工程师负责肾脏三维模型重建,可用于术前模拟和术中导航[8]。
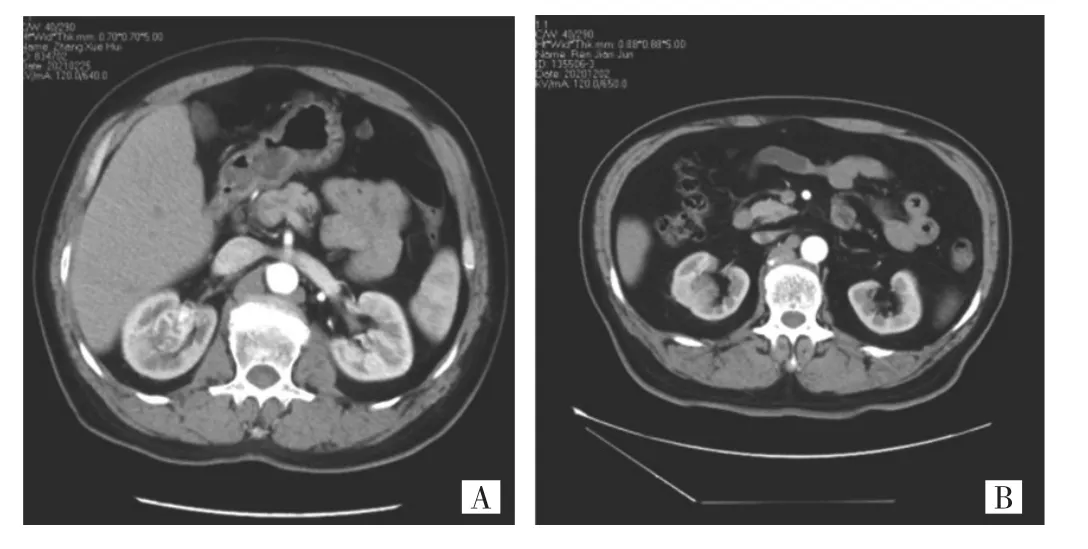
图1 肾内生性肿瘤术前CT检查所见(A:肿瘤位于肾上极;B:肿瘤位于肾下极)
1.3 三维可视化技术术前规划 三维可视化技术可以显示肾肿瘤与肾血管系统及集合系统的毗邻关系(图2),使外科医师术前对肿瘤的解剖结构有更充分的认识,从而帮助其规划肿瘤的切除路径和范围。在模拟的三维空间中,外科医师可以依据重建的模型进行术前规划,从而对手术有一个清晰的认识,实现对手术过程中可能出现紧急情况的预测,在手术中防止慌乱出错。

图2 三维可视化技术重建
1.4 手术方式 取健侧卧位,于锁骨中线髂前上棘水平处切开1.5 cm,置入12 mm Trocar套管针,作为镜头孔,分别于腋前线及腋后线肋缘下2 cm处切开1 cm,置入8 mm Trocar套管针,作为1臂和2臂通道,于腋前线Trocar腹侧8 cm处切开1 cm,置入8 mm Trocar套管针,作为辅助孔;启动达芬奇机器人手术系统,连接机械臂,经后腹腔行手术操作。
分离肾脏周围脂肪显露肾脏后,连接三维可视化技术系统,将三维模型数据导入达芬奇机器人手术系统,使虚拟的三维模型与手术实时影像同时呈现在术者和医学影像工程师面前。由工程师对重建的三维模型进行位置、角度及大小等调节,实现半透明的肾脏三维模型与实时影像的肾脏轮廓的匹配。三维模型中肿瘤和肾血管系统呈实质状态,术者以此为依据进行肿瘤与血管的定位(图3)。

图3 机器人辅助手术术中图像(A:术者及助手操作达芬奇机器人手术系统;B:术中影像;C:三维模型与术中影像实时融合)
在三维模型导航下迅速定位需要阻断的肾动脉的位置,小心分离并显露肾动脉,单极电刀或双极电刀结合小心游离,仔细探查肾表面未见明显外突改变,选择性夹闭肾动脉,观察肾脏颜色苍白区域。在三维可视化技术的引导下,沿定位点切开正常肾脏组织,寻及肿瘤,发现肿瘤较周围正常组织颜色明显苍白,切除肿瘤(图4),仔细观察未见肿物残留及肾盂损伤。

图4 术中切除的肿瘤组织
用3-0、2-0 V-lock线贯穿基底缝合肾创面,严密缝合血管断端,且不留死腔。解除肾动脉阻断,观察肾脏颜色逐渐恢复至术前。2-0 V-lock线连续缝合肾周脂肪,恢复肾周脂肪连续性。置入腹膜后引流管,完整取出切除标本。
记录三维模型与术中影像实时融合的时间、手术时间、术中估计出血量、肾动脉阻断时间、有无并发症及切缘阳性情况。
1.5 三维模型对医师治疗建议影响比较 邀请5名临床经验超过10年的泌尿外科医师参与研究,每名医师随机选取25例患者中的10例患者,并且医师不知情患者的其他临床资料,医师先后阅读10例患者的CT图像和重建的三维模型,并给出自己阅读不同影像资料后的治疗建议。分别统计阅读三维模型前后5名医师对50例患者的治疗建议。
1.6 统计学处理 采用SPSS 26.0统计软件。计量资料以表示,手术前后血肌酐比较采用配对样本t检验。计数资料组间比较采用χ2检验。采用Pearson相关分析三维模型与术中影像实时融合的时间与手术时间的相关性。P<0.05为差异有统计学意义。
2 结果
2.1 术中及术后随访情况分析 在三维可视化技术的辅助下,25例患者均顺利切除肿瘤,均未转为开放手术。三维模型与术中影像实时融合的时间为22~36(29.2±4.1)min,手术时间为65~120(92.4±14.2)min,术中估计出血量为 50~180(100.6±8.3)ml,肾动脉阻断时间为15~25(19.1±3.2)min,无术后发热、继发出血或漏尿等并发症。术后病理诊断肾透明细胞癌20例,乳头状细胞癌4例,血管平滑肌脂肪瘤1例;无切缘阳性患者。术后随访3~6(4.3±0.5)个月,术后血肌酐 58.2~101.3(83.1±8.5)μmol/L,与术前的(80.3±8.9)μmol/L比较,差异无统计学意义(t=-1.163,P>0.05)。术后3个月复查肾脏CT平扫及增强,均未发现复发。
2.2 三维模型与术中影像实时融合的时间与手术时间的相关性分析 Pearson相关分析显示三维模型与术中影像实时融合的时间与手术时间呈负相关(r=-0.975,P<0.01)。
2.3 阅读三维模型前后治疗建议的比较 5名医师阅读完CT图像后选择肾部分切除术的比例为82.0%(41/50),而5名医师中有3名医师在阅读三维模型后分别对2、2和3例患者的治疗建议发生了改变,由肾全切术改为肾部分切除术,即治疗建议选择肾部分切除术的比例为96.0%(48/50)。医生阅读三维模型前后选取肾部分切除术的比例比较差异有统计学意义(χ2=5.005,P<0.05)。
3 讨论
随着人们健康意识的提升和检查技术的进步,外凸率较低的肾肿瘤检出率越来越高。关于此类肿瘤国内外学者仍未有统一的定义。Black等[9]将被正常肾组织完全包围的肿瘤定义为中央型肾肿瘤。Brown等[10]认为肿瘤边缘距离肾集合系统或者肾门部血管<5 mm的肾肿瘤即可定义为中央型肾肿瘤。Gu等[11]将完全肾内生性肿瘤定义为R.E.N.A.L.评分系统的E评分为3分的肾肿瘤。Finley等[12]采取了不同的标准,将在CT上发现病变超出肾实质边界的百分比<40%的肾肿瘤定义为肾内生性肿瘤。本研究认为Finley等[12]对肾内生性肿瘤的定义在临床上的意义更大,并以此定义选取肾内生性肿瘤患者纳入研究。肾内生性肿瘤具有特殊的解剖位置,目前已经成为困扰泌尿外科医师的一大难题。如果通过三维可视化技术实现术前模拟和术中导航,将会对肾内生性肿瘤的治疗产生极大的帮助[13]。
外科医师以往采用术中超声来定位肿瘤,但是超声定位的学习曲线长,同时术中超声探头的方向和角度不断变化,很难精确定位肿瘤的位置[14-15];当肿瘤与正常的肾实质等回声时,超声无法明确判断肿瘤与正常肾实质之间的界限[16]。因此术中超声定位肾内生性肿瘤时仍然存在很多的问题。近年来,影像技术不断发展,出现了以二维CT图像为基础构建三维模型的三维可视化技术。与传统的CT图像相比,三维模型可以更好地显示肾血管系统、集合系统及肿瘤的解剖关系,因此在重建的模型上可以精准的定位肾内生性肿瘤。在阅读三维肾脏模型后可以明确肿瘤的解剖位置,进而制定手术方案,实现术前规划;而且术中三维模型可以与实时影像相结合,实现术中导航,使术者在手术操作时心中有数,临危不乱。
Antonelli等[17]通过对比二维CT图片和三维重建影像发现阅读三维重建影像的平均时间更短,不同观察者之间的一致性更高,比阅读CT平扫图像效率更高。Bertolo等[18]对临床经验不同、学历不同的医师的研究发现,3D可视化技术帮助更多的医师选择肾部分切术。但以上结论以外科医师主观的意见为基础,缺乏客观数据来支持。本研究选取肾内生性肿瘤的患者进行研究,从客观临床资料和三维模型对医师治疗建议的主观影响两方面进行论证,发现三维可视化技术联合机器人手术,可使更多的肾内生性肿瘤患者选择肾部分切除术;而且在术中导航的情况下,寻找并阻断肾血管以及切除肿瘤的速度大大提高,这一效果在解剖情况复杂的患者中更加明显,三维重建模型与术中的实时影像的匹配度越高,手术时间越短;这与随着术中导航的时间的增加总体的手术时间有减少的趋势的研究结果相吻合。Wunderlich等[19]研究发现三维重建影像可以准确的呈现肿瘤与集合系统和血管之间的关系,术者阅读三维重建影像后可以充分理解肿瘤的解剖结构,这为复杂肾肿瘤的术前模拟和预测手术风险提供了极大的帮助。Porpiglia等[20]根据是否进行高精度三维(hyperaccuracy three-Dimensional,HA3D)重建分组进行对照研究,发现采用HA3D重建技术术前模拟分支肾动脉的阻断是可行和有效的。经过术前模拟后,所有患者均实现了动脉的选择性阻断,并成功进行了机器人辅助腹腔镜下肾部分切除术(robot-assisted laparoscopic partial nephrectomy,RAPN),但两组对肾功能的影响并无明显的差异。国内一些学者研究发现三维重建技术有利于复杂性肾肿瘤LPN术后肾功能的保护,减少肾实质的丢失[21]。本研究进一步将三维模型与机器人手术平台相结合,将三维肾脏模型与实时术中画面融合,为医师术中导航提供了极大的便利。而且在术中导航的指引下,实际手术情况和术前规划的手术方式基本一致,同时对患者的肾功能也得到了很好的保留。总之,三维可视化技术可以直观的呈现肿瘤与肾血管系统和集合系统之间的关系,提高术者读片效率,并以此为依据进行术前规划;重建的三维肾脏模型与实时的手术画面相结合,帮助术者实时定位,术中操作也更加从容;在术中导航的指引下手术的流程与术前的规划基本一致,顺利完成RAPN。并且术前及术后血肌酐水平比较差异无统计学意义,肾功能得到了很好的保护。三维可视化技术与机器人辅助部分肾切除术相结合,为肾内生性肿瘤的治疗提供了极大的方便,提高了手术的安全性和准确性。此外三维可视化模型能使患者及其家属更直观地了解病情和手术方案,方便医患沟通,从而降低医患矛盾的发生风险。
本研究为小样本量的回顾性研究,将来还需要进行更大范围的前瞻性多中心随机对照研究。目前进行术中导航时三维模型不能自动调整角度和图像大小,使投影与目标相对应,影响术中导航效果。如何实现自动配准是今后需要解决的关键问题。