基于有限元法的甲虫后翅生物力学特性分析
2023-02-27倪书文孙鑫还淇徐俊哲万磊李新
倪书文,孙鑫,还淇,徐俊哲,万磊,李新
(宿迁学院 机电工程学院,江苏 宿迁 223800)
0 引言
随着环境的变化,甲虫翅膀在结构、功能形态和材料特性等方面已经进化出能够适应恶劣自然环境的优化性能。虽然,相对于昆虫的总体重来说,翅膀的质量占比小,但它们的翅膀在扑翼、滑翔和悬停时仍具有很好的稳定性和较高的承载能力。多年来,昆虫飞行机理启发的MAV概念引起了人们较强的兴趣并开展广泛的研究,受其启发设计并制造了多种仿生扑翼MAV[1-7]。近几年来,MAV的发展更加多样化,根据应用的场合不同,例如用于军事侦察、航拍、抢险救灾和气象探测等,飞行器研制的聚焦功能也不相同。这些飞行器将以其低成本、极高的机动性和不显眼的操作方式彻底改变遥感领域,并且未来的MAV将能够针对战场行动和民用建筑执行多种近距离侦察和安全检查任务。
扑翼产生升力的机制最近已成为研究昆虫飞行的焦点,它是开发仿生微小昆虫飞行器的关键技术。风洞内的烟雾可视化技术和模拟扑翼动力学的计算流体动力学(Computational Fluid Dynamics,CFD)方法是表征扑翼飞行的两种主要方法。Le等[8]采用CFD模拟器对瓢虫的悬停飞行进行模拟,显示前缘涡的生成特性与实验中观察的结果相符合。然而,大多数研究人员都忽略了机翼灵活性的影响。Tuyen等[9]使用二维柔性机翼模型探索机翼柔性对气动力的影响,与刚性机翼模型相比,柔性机翼模型可以产生更精确的气动力。
在形态学方面,许多研究探索了甲虫翅膀的不同方面,如弹性模量、形态和几何特征、翅脉功能、折展功能和翅膀拍动特性[10-14]。对昆虫翅膀弯曲刚度的研究有助于了解昆虫的结构特性。Combes等[15]研究了脉序模式和机翼柔韧性之间的关系,发现前缘脉对产生展向和弦向各向异性至关重要。Ha等[16]通过有限元研究了独角仙甲虫后翅的弯曲不对称,发现翼膜的应力强化和翅翼的弯曲度都会影响昆虫翅膀的弯曲不对称性。Li等[17]研究了长足大竹象后翅的结构特性,发现其后翅在多变气动载荷下具有很好的弯曲变形协调性。
考虑到材料各向异性和非均匀性的柔顺翅翼模型对阐明昆虫的飞行机理很有帮助,本文使用三维扫描仪获得长足大竹象后翅的点云数据并用逆向建模技术获得翅翼的真实三维造型。基于获得的翅翼材料属性,在有限元模型中采用二节点管单元Pipe 288模拟翅脉和四节点壳单元Shell 181模拟翅膜,探究后翅在弯曲载荷下的生物力学特性。研究结果将为仿甲虫扑翼MAV的翅翼结构的设计提供理论指导。
1 三维扫描和逆向建模
为便于分析后翅的拍动特性,需要用三维扫描和逆向建模技术重构后翅的三维模型去描述后翅的结构性能。在一批体重和形态参数接近的成活样本中,选择一个和平均值接近的后翅样本进行三维扫描,其质量为4.45 g,平均厚度为0.16 mm,沿着翼展方向的后翅长为44.83 mm,沿着翼弦方向的后翅宽为15.9 mm。将后翅从长足大竹象的翅根处分离并用蒸馏水冲洗,在室温下自然风干。采集数据时,为了减少表面的反射性、颜色及曲率特性差异对激光数据造成的干扰,在样本表面涂抹显像剂(型号为JIP145,日本生产)以达到着色处理的效果。涂抹薄薄一层显像剂后再次在室温下风干,干燥后使用三维扫描仪(型号为JTscan-MS-50,精度为0.01 mm,国产)进行扫描以获得点云数据。
利用逆向工程软件Imageware对后翅的扫描数据点进行处理并建模,这包括删除点云中的噪声点、简化点云数据、采用高斯滤波器进行平滑处理及基于弦偏差法的降维处理。采用点云拟合曲面法进行后翅的三维模重构,如图1所示。
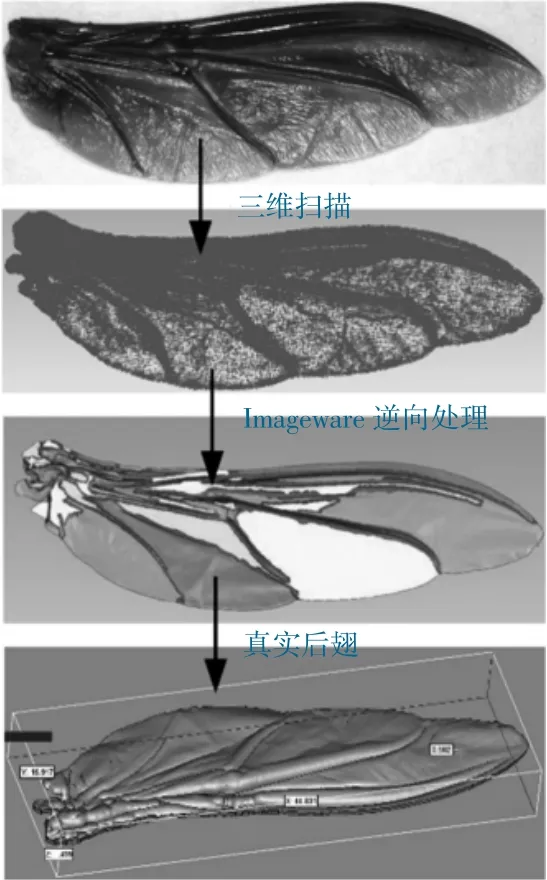
图1 后翅的逆向重构过程
2 翅翼的边缘关节的弯曲测试
后翅在扑翼期间产生了有用的气动力和变形特性,翅膀边缘关节(Marginal Joint,MJ)在后翅展开后的保持锁定和避免扑翼时产生交变载荷,对后翅遭受破坏起到了重要作用。因此这里对后翅区域MJ处的弯曲性能进行研究。为了和模拟结果对比,这里对真实后翅进行了弯曲测试。为减少测试误差,选取3个相同尺寸的后翅,并将翅膀固定在一个小型弯曲测试系统中。如图2所示,弯曲测试系统由可移动平台、力传感器、支架和夹具组成,夹具可将翅翼固定到平台上。为了便于测量点力下的翅翼弯曲变形特性,在传感器上安装一根细长的刚性棒。对后翅进行一系列位移测试,就可确定后翅上的单独反作用力。首先,将连接到力传感器上的刚性棒移向翅翼的MJ处,向下运动一定位移(1.1 mm),传感器将获得MJ处的反作用力。观察发现,翅翼失去水分后,翅脉的弯曲刚度显著增加,这可能会使弯曲测试结果存在较大误差,因此每次测试要在将翅膀与身体分离后的5 min内完成。图3为后翅的MJ 点处位移的反作用力,对于1.1 mm 的位移,MJ点的反作用力为(11.5±0.31)mN。
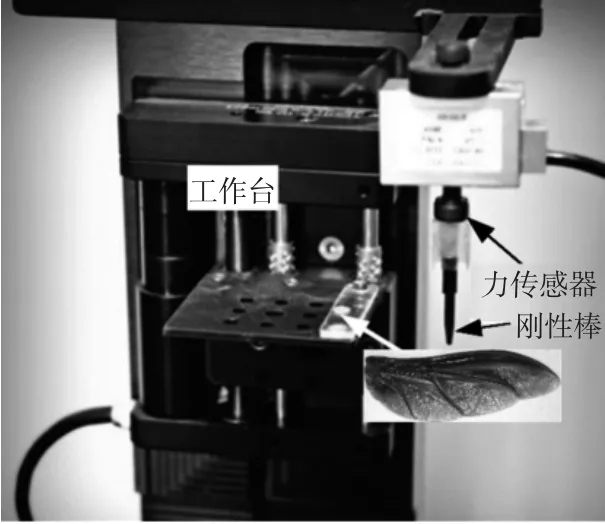
图2 弯曲测试系统
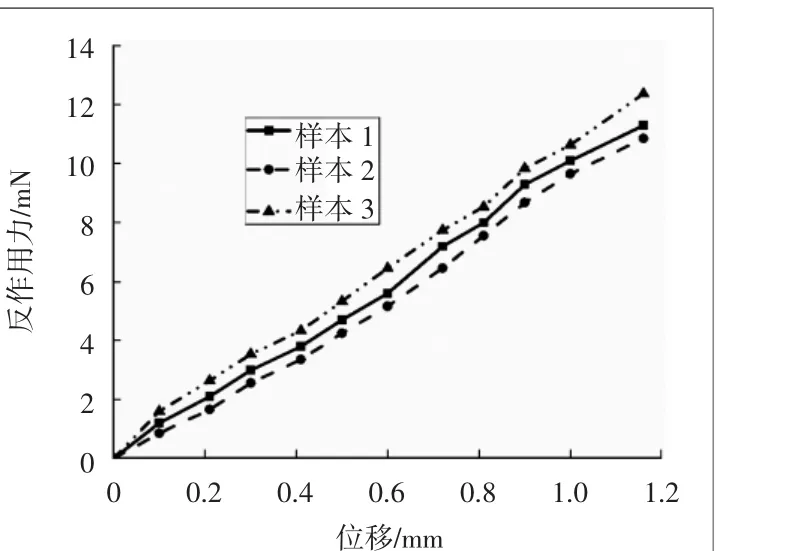
图3 长足大竹象后翅在MJ点位移的弯曲试验结果
3 有限元建模
前期Li等[12]利用迷你电子万能试验机(量程为20 N,型号为WDS-100A,国产)测试了长足大竹象后翅的力学性能。考虑到翼膜属于非均质材料,将后翅分别在翼展和翼弦方向上划分为4个区域进行取样;考虑后翅具有柔性且薄的特点,设计了一种特殊的纸夹具。对于翅脉的弹性模量,计算多组样本的测试值,计算出主翅脉的弹性模量值。事实上,在翼膜的材料属性定义中应考虑翼膜是各向异性和非均匀的。考虑到材料的各向异性特性,计算弹性模量后选用平均值作为有限元模型中材料属性的设定。如图4所示,计算得到4个区域翅膜的平均弹性模量为2.5 GPa。4个区域的翅膜的平均泊松比为0.18。主翅脉的平均值为4.75 GPa,由于翅脉截面的特殊性,在拉伸测试期间,很难获得它们在竖直方向的应变;使用纳米压痕大致测得翅脉的泊松比为0.25。
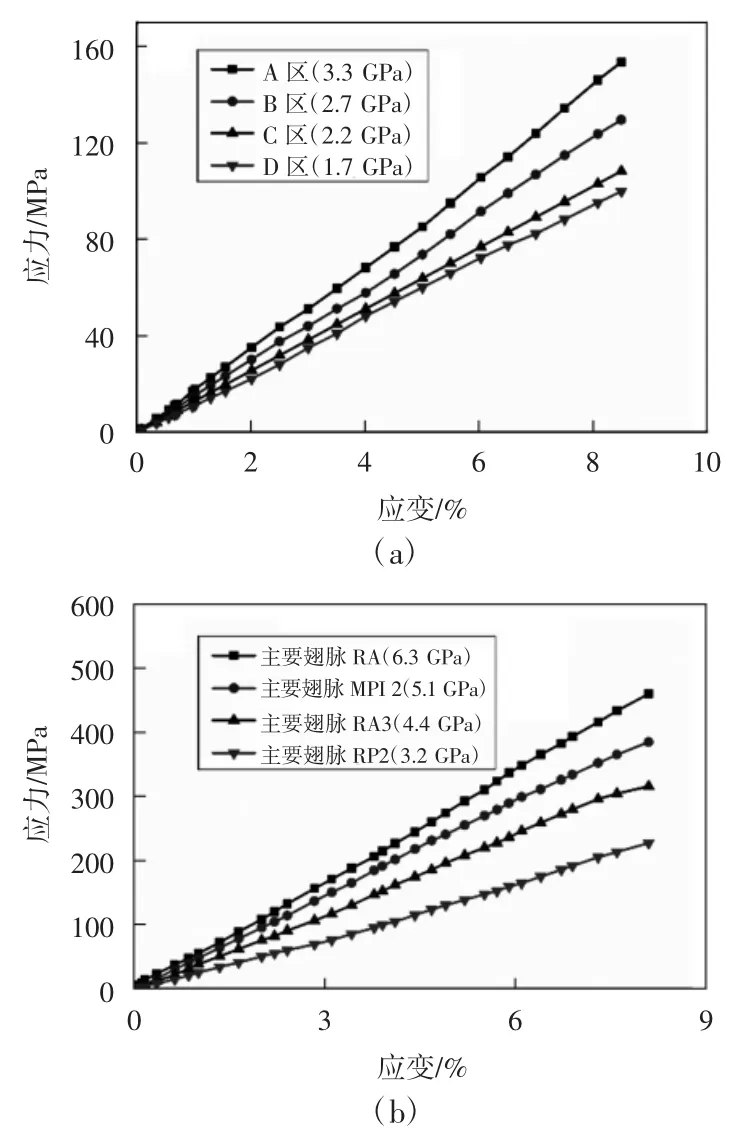
图4 后翅的翼膜和主翅脉的材料属性
在有限元模拟中,翼膜的弹性模量取为2.5 GPa,翅脉的弹性模量取为4.75 GPa,密度为0.8×103kg/m3,泊松比μ=0.25。分别采用二节点管单元Pipe 288模拟翅脉,采用四节点壳单元Shell 181模拟翅膜。考虑到四边形网格在计算时更为精确,因此采用四边形网格对翅膜进行网格划分。由于从翅根到翅尖,翅脉的厚度差异较大,所以采用渐变网格对翅脉进行网格划分,划分结果如图5所示。将弯曲测试得到的反作用力平均值作为施加在翅翼模型MJ处的点力,翅根处施加固定约束,仿真结果如图6所示,可看出翅翼变形很小,并未破坏翼面,应力变化协调,总体显示翅翼在气动载荷下具有很好的结构变形协调性。
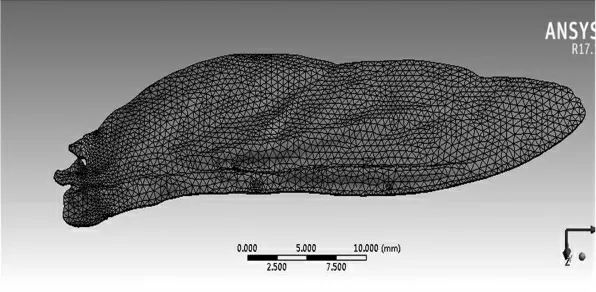
图5 后翅模型的网格划分
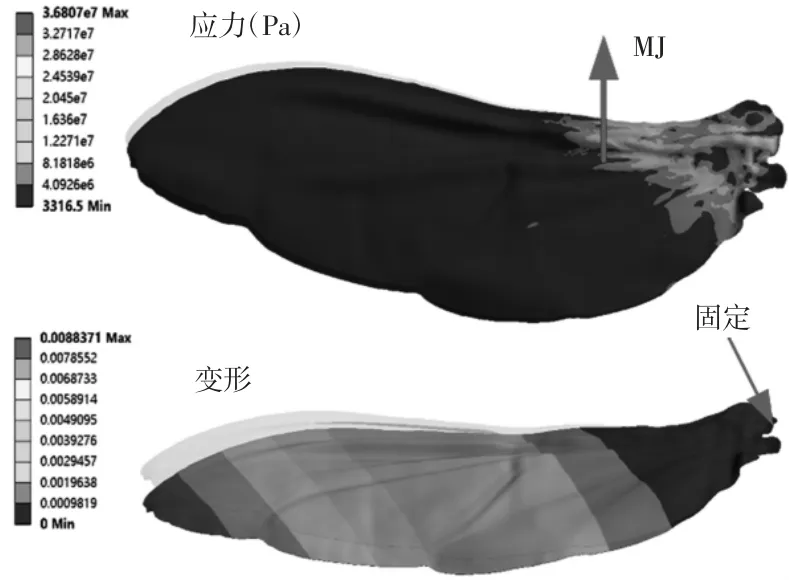
图6 在后翅MJ处施加点力载荷下的翅翼的结构变形特性
4 结论
本文使用有限元法探究了甲虫后翅结构的生物力学性能,使用三维扫描仪扫描翅膀获得点云,采用逆向建模技术重构真实后翅的几何模型。使用弯曲测试得到了翅翼在位移变化情况下的反作用力,采用数值模拟技术探究后翅模型在以反作用力为点力下的弯曲性能,其中对翅膜和翅脉分别单独赋予材料属性。结果表明,后翅的脉序模式在受载时具有很好的结构性能,在抵抗翅翼的疲劳破坏方面具有重要的作用。
