一种手指关节康复训练器械的设计与动力学仿真分析
2023-02-27马浩浩姚宝珍冯彦伟郭泰聪唐伟
马浩浩,姚宝珍,冯彦伟,郭泰聪,唐伟
(天水师范学院,甘肃 天水 741001)
0 引言
马浩浩等[1]已对上肢关节辅助康复训练器械开展研究,提出了上肢关节个性化定制康复训练器械解决方案,并基于逆向工程设计了上肢胳膊、手腕等骨折、关节损伤所使用的固定护具,提出了针对指伸肌麻痹、手指及腕挛缩无力等手指功能障碍等症状的康复训练器械结构图。本文在此基础上继续研究手指关节康复训练器械,通过正、逆向求解、动力学仿真,模拟手指关节康复训练的动作,进行手指关节康复训练过程中的动态特性分析,为手指功能恢复提供可靠的数据指标,为手指康复训练器械的研发提供有力技术支持[2-3]。
1 手指关节康复训练机构设计
本文应用逆向工程对人体上肢关节开展设计,采用三维扫描仪采集人体上肢关节点云数据,然后创新设计出手部可穿戴护具结构图,如图1所示。
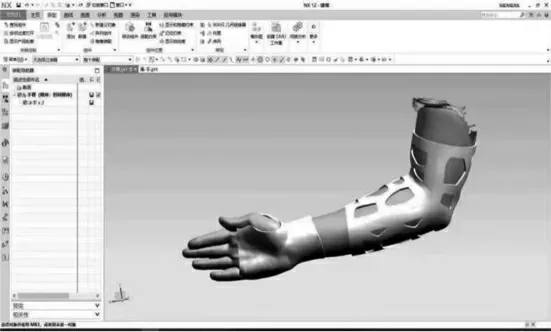
图1 手部可穿戴护具结构图
2 训练器械结构分析
基于Unigraphics NX软件设计右手指关节康复训练器械,初步设计结构如图2所示。本文对手指关节康复训练器械模型简化,以右手中指为研究对象,简化后的结构如图3所示,其组成构件有手部护具固定件、推拉力测力驱动、导轨复合推杆、推杆、手指活动连杆、指套等。该康复训练器械除驱动构件有3个活动构件,2个转动副(手部护具固定件与导轨复合推杆、推杆与手指活动连杆),1个移动副(导轨复合推杆与推杆),其平面运动自由度F=3n-2Pl-Ph=3×3-2×3-0=3。

图2 手指关节康复训练器械设计
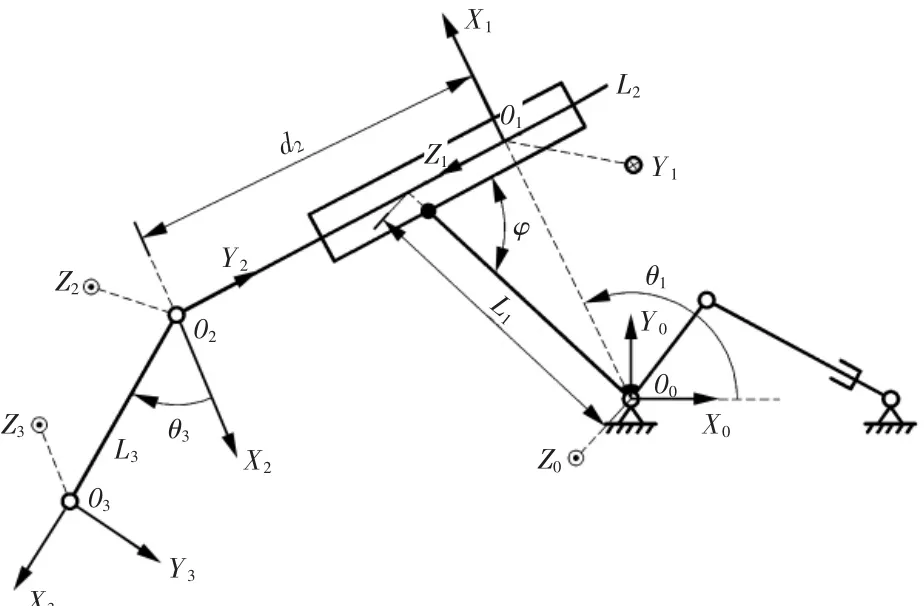
图3 手指关节康复训练器械结构示意图
研究手指关节康复训练机械结构,推导其位形运动学方程,即正向求解手指关节康复训练器械问题,主要涉及求解训练器臂的各个关节与尾端指节的位置姿态之间的关系。计算求解中选择参考坐标系,按照Denavit-Hartenberg约定,设定4个变量与4个基本矩阵的乘积[4]:
Ai=Rot(z,θi)Trans(z,di)Trans(x,ai)Rot(x,ai)。
建立图3所示的坐标系并满足D-H约定,其中θi、αi、di、ai为 与 杆、关节相关的参数,则康复训练器械的D-H参数如表1所示。
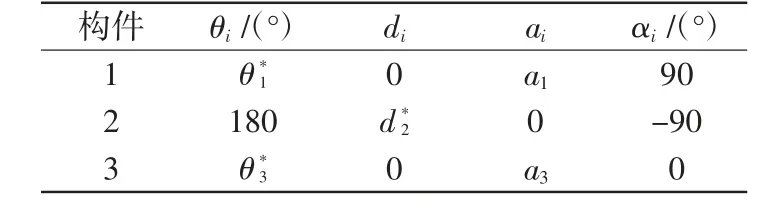
表1 康复训练器械的D-H参数
转化矩阵为:
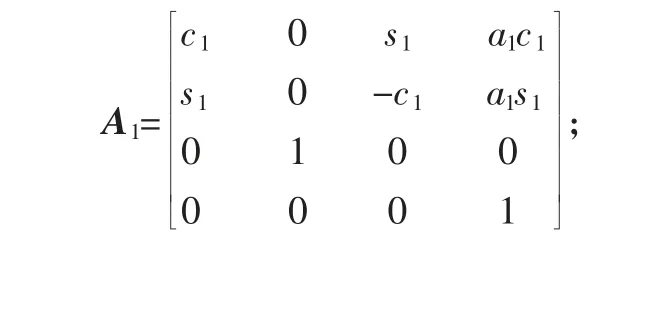
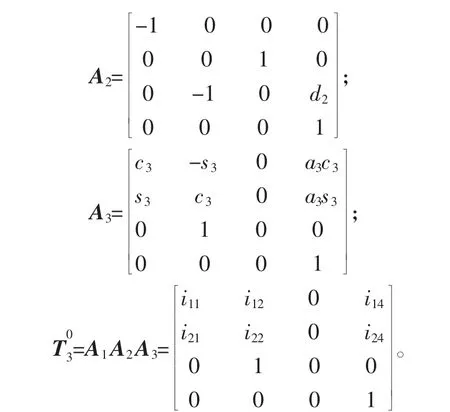
其中:i11=-cos(θ1-θ3);i12=sin(θ3-θ1);i14=l1sin φcos θ1+d2·sin θ1-l3cos(θ3-θ1);i21=sin(θ3-θ1);i22=cos(θ1-θ3);i24=l1sin φsin θ1-d2cos θ1+l3sin(θ3-θ1)。
根据转化矩阵,可基于各关节处的变量值推导手指康复训练器械的运动姿态,探究康复训练过程,为器械的使用、功能扩展提供有力数据支撑。
3 虚拟样机仿真分析
利用多体动力学仿真软件ADAMS对手指关节康复训练器工作过程进行动力学仿真,模拟器械工作过程中的动态特性、安全及柔顺性能等,可得该方案设计的手指关节康复训练器各个构件的运动规律[5-6]。
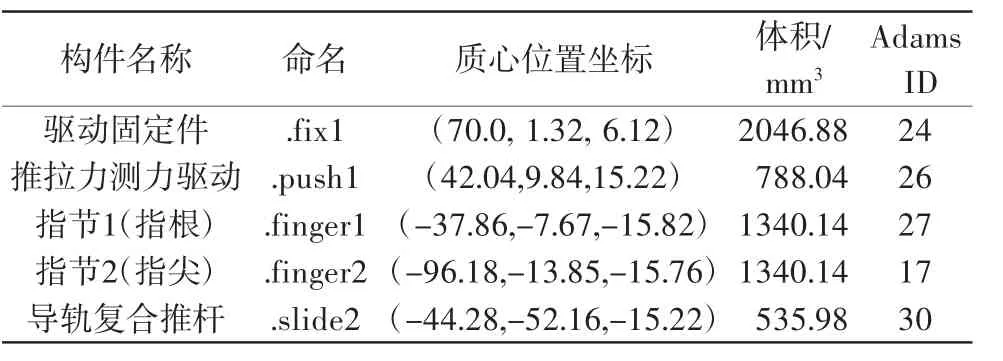
表2 器械主要构件参数
选取中指为研究对象(其他指与其类似)做模型简化,建立虚拟样机模型,根据手指关节康复训练器手部护具固定件、推拉力测力驱动、导轨复合推杆、推杆、手指活动连杆、指套等部件的实际运动,设置模型中各个关节的连接方式。手部护具固定件与推拉力测力驱动件转动副连接,驱动件与导轨复合推杆固定连接,导轨复合推杆沿导轨添加移动副,手指活动连杆之间转动副连接,具体设置如图4所示。
图4 手指关节康复训练器建模
根据手指中指关节实际运动驱动训练器运动,设定仿真时间与步长,初始状态为图4所示的手指伸直状态,训练过程运动学模拟如图5所示。图5(a)为手指握回一半状态时各关节运动情况,图5(b)为手指全部握回为拳头状态时各关节运动情况,指根关节(.finger1)指尖关节(.finger2)质心的运动轨迹如图5中的曲线所示。本运动仿真较好地再现了手指关节的康复训练手指握回过程,运动平滑,为训练器械动力学求解提高了良好的虚拟样机,正确有效。
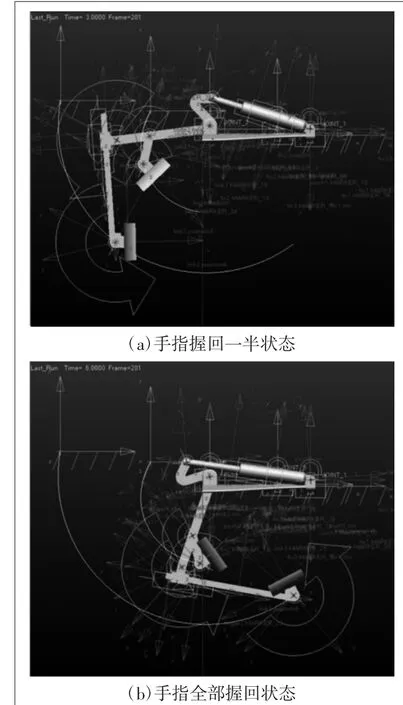
图5 手指关节康复训练过程模拟
参照动力学仿真得到的结果对该手指关节康复训练器的机构进行优化,修定手指关节康复训练器手部护具固定件、推拉力测力驱动、导轨复合推杆、推杆、手指活动连杆、指套等部件结构尺寸。手指关节康复训练过程中推杆.slide2的位移、速度及加速度仿真曲线如图6所示,可以看出驱动件位移趋近于直线但非直线,驱动速度呈凹抛物线型,驱动较为理想,运动较为平缓,可作为康复训练指标数据对比评估康复状态使用。
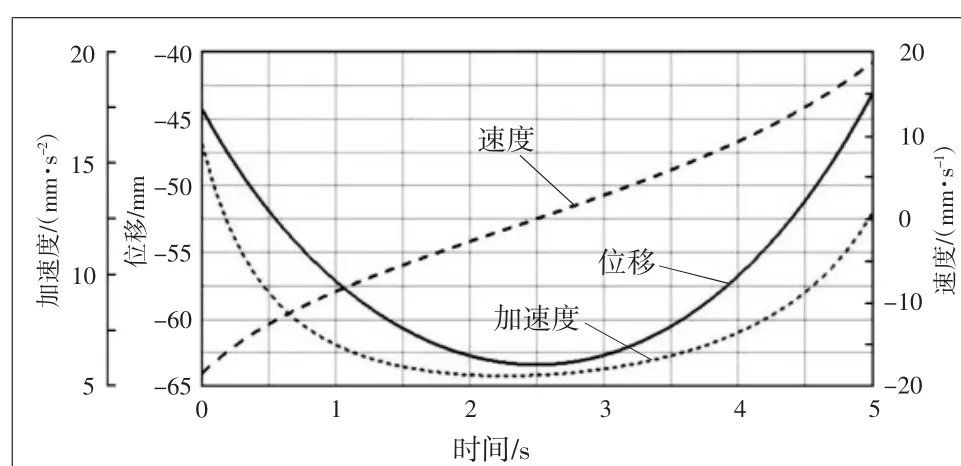
图6 推杆.slide2的运动仿真曲线
指根关节.finger1与指尖关节.finger2的x方向运动仿真曲线分别如图7与图8所示,x正方向为手指弯曲指向手腕方向,通过对比表面两指弯曲曲线平缓,表征动力学参数在手指训练活动中更为舒适,结合手指关节康复训练器的动力学仿真,良好地表征手指关节康复训练器动力学参数。通过对比正常手关节运动位移、速度、加速度等数据,便可对康复情况做出评价。
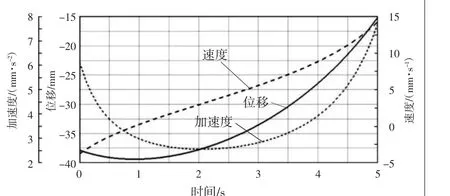
图7 指根关节. finger1的x方向运动仿真曲线
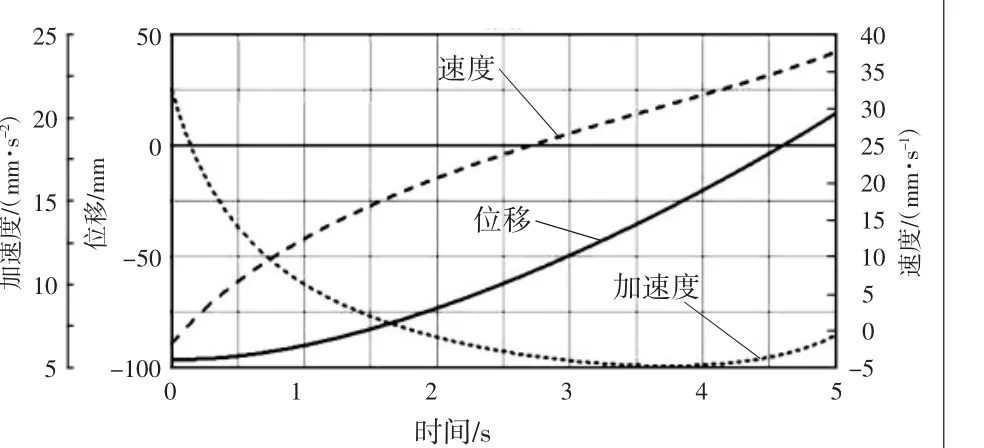
图8 指尖关节. finger2的x方向运动仿真曲线
通过使用多体动力学仿真软件ADAMS建立手指关节康复训练器械虚拟样机,对该执行机构的路径及其机构运动进行仿真,证明本文所设计的手指关节康复训练器械尺寸结构合理,运动原理正确,为后续开展运动控制与智能监测提供了有力的参考依据[7]。
4 物理样机制作与实验验证
本文选用FDM型3D打印成型技术制作手指关节康复训练器械物理样机,打印文件采用.STL文件格式。充分考虑打印精度、护具强度、打印效率,设定打印工艺参数,分件打印,对单件后处理后完成样机装配[8]。
对该方案设计的手指关节康复训练器械物理样机进行实验验证,图9所示为穿戴该物理样机设备进行手指关节康复训练过程。图9(a)为手指自由状态下该物理样机的穿戴使用展示,图9(b)为手指弯曲状态下该物理样机的穿戴使用展示。通过穿戴使用对比,体验该设备较为良好的使用性能,手指的弯曲及伸展过程流畅,未发现卡顿,弯曲过程有可控弯曲阻尼,连接推拉力测力驱动件可对阻力进行量化分析。
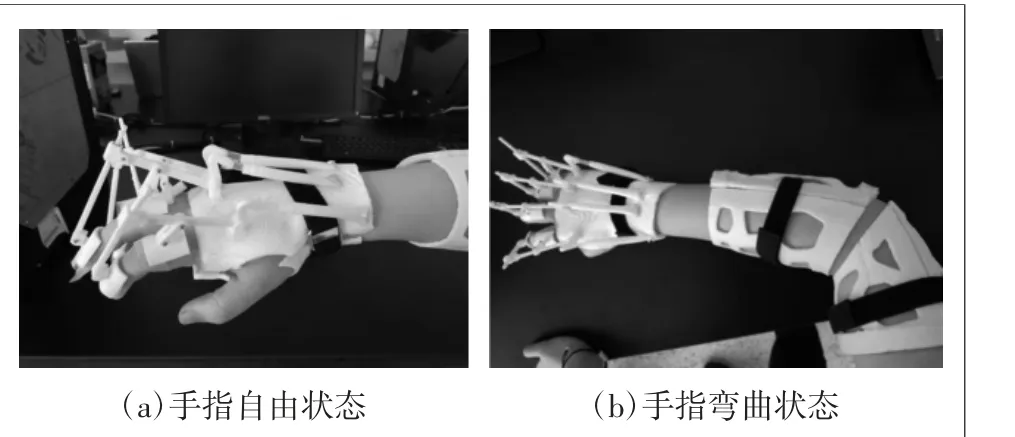
图9 3D打印上肢康复护具与手指训练器械
5 结论
本文设计了一种手指关节康复训练器械,基于逆向工程个性化定制确定结构参数;开展了正、逆向求解,基于ADAMS软件进行手指关节康复训练器械动力学仿真分析,探究手指关节康复训练过程,验证了手指康复训练器械模型的正确性;并利用3D打印制作出物理样机,通过试验测试、优化设计,所设计的手指关节康复训练器械能够达到康复训练要求,为康复器械的使用、功能扩展提供有力数据支撑。
