某发动机智能化试车系统的应用研究
2023-02-26罗宿明华继伟单晓明华称祥
陈 伟 罗宿明 华继伟 单晓明 华称祥
(中国航发湖南动力机械研究所,湖南株洲 412000)
0 引言
航空发动机在研制、批产、使用全过程中,试验是一个至关重要的环节,大多数的技术质量问题可以在这个环节暴露。一方面,必须按照相应规范和要求,开展大量考核性验证和试验,满足产品安全性、可靠性和使用寿命的要求;另一方面,由于实际工作的复杂性、使用状态的差异性、客观现实的不适应性等原因,目前还不能完全通过数值仿真和分析预测解决发动机全包线范围内的所有问题。因此,在航空发动机技术发展过程中,试验及测试贯穿研制过程和技术发展的各个环节,且占比依然很大[1]。有效的试验数据可以修正和完善航空发动机设计理论和数值仿真计算模型,不断推动航空发动机设计技术的创新发展[2-3]。
某型涡轴发动机是中法双方以“风险共担、对等合作”方式联合研制的具有第四代技术特征的先进民用涡轴发动机,首装7 吨级民用直升机。该型涡轴发动机在适航取证阶段,需要验证发动机投入使用后,在3000 小时的翻修间隔期(TBO)内能正常工作,研制团队通过采用加速任务试验的方式进行验证,但该加速任务试验谱复杂、试验时间长。综合考虑后,研制团队最终确定利用智能化试车系统开展试验[4]。在应用智能化试车系统开展试验的过程中,出现了“动力涡轮转速超调过大”“动力涡轮转速无法保持稳定”等问题,本文针对出现的问题,通过对发动机特性、智能化试车系统控制逻辑、发动机试车台特性等进行分析研究,分析问题产生的原因,并提出经调试试验验证有效的解决措施,对智能化试车系统的适用性进行有效完善,保证适航取证加速任务试验的顺利完成。
1 智能化试车系统
智能化试车系统是基于某型发动机加速任务试验项目需求进行开发的,智能化试车可根据预先编制的试验谱进行智能化试车,可根据设定实现快速加减速,具备手动试车模式和自动试车模式切换能力,有效地减少工作人员的误操作率和工作量,并具有可靠、完善的保护功能。试验过程中,智能化试车系统通过调节水力测功器负载、发电功率、引气量等方式满足试验谱对各项参数指标的要求[5]。
智能化试车系统独立于试车台常规测试系统和电气系统之外,即在未接入试车台时,车台能完成既有的手动试车功能。在接入试车台后,只需完成通信和硬线接口对接以及发动机特性参数的设置,即能实现对发动机试车过程的智能化控制[6]。
智能化试车系统不直接采集数据和控制设备,而是通过高速以太网通信和硬线信号实现数据交互。在正常使用中,通过与测试系统通信获得发动机试验参数后,智能化试车系统根据试验谱设置的目标,计算得到试车台油门杆信号、引气阀开度等设备控制的目标值,并将指令发送给电气系统执行。自动试车的过程中,如果发生超限报警等情况,可按试验大纲要求实施保护动作[7]。
智能化试车系统程序主要包括PLC(可编程逻辑控制器)程序和上位机程序两个部分。PLC 程序完成对发动机、测功器以及车台设备等的自动控制和保护;上位机程序完成自动试车的相关设置、试验进度统计、试验数据通信和实时监控等功能。为确保发动机安全,智能化试车系统具有超温、超转、振动大、喘振等紧急停车保护的功能,试车台控制原理图如图1 所示;具有报警后自动下拉发动机到慢车且1 分钟后自动停车的功能;具有实时监视转速、温度、滑油压力等参数,并做出提醒的功能;操作员手动油门杆优先;手动紧急停车优先;全方位确保发动机安全。
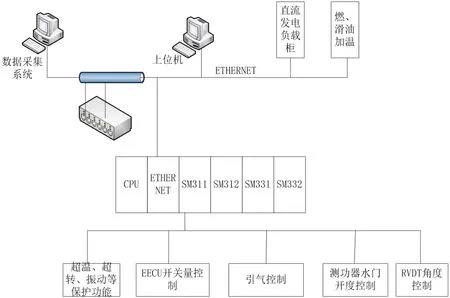
图1 试车台控制原理图
加速任务试验过程中,发动机采用动力涡轮转速控制模式(Np 控制模式),即通过改变水力测功器负载控制发动机转速、温度等,根据加速任务试验大纲要求,试验谱以燃气发生器转速(Ng)和燃气涡轮出口处燃气温度计算值(T45REF)为考核指标,需两项指标分别或同时达到目标值。
智能化试车系统对发动机动力涡轮转速(Np)的控制逻辑:智能化试车系统根据预先编辑的试验谱,读取动力涡轮转速目标值,然后转换成电位信号(油门杆角度XPC)。一方面,XPC 信号传递至车台水力测功器,水力测功器通过调节进出水阀门开度改变水力测功器负载;另一方面,XPC 信号传递至发动机电子控制器(EECU),EECU 通过控制发动机增减燃油流量(Wf)改变发动机产生的功率。通过对水力测功器负载和Wf 的调节控制Np。
在加速任务试验的准备阶段,研制团队应用智能化试车系统进行了多次调试试车,出现了“动力涡轮转速超调过大”“动力涡轮转速无法保持稳定”等问题。
2 动力涡轮转速超调过大
2.1 现象
试验过程中,智能化试车系统控制发动机切换状态时,Np 会有较大的超调,快速上推油门杆(XPC)后,Np 会短时间增加,然后稳定在Np=100%的目标值,经查看数据,最大超调量为3.8%,状态切换时Np 超调曲线图如图2 所示。

图2 状态切换时Np超调曲线图
2.2 原因分析及措施
对当次试验数据进行分析,状态切换时Wf、水力测功器负载、Np 的曲线图如图3 所示。智能化试车系统开始上推油门后,XPC 信号给出,此时EECU 控制发动机开始增加Wf,水力测功器增加负载,但水力测功器负载的变化相对于Wf 的增加有延迟(图3 中的Wf 从724 号计时点开始响应,水力测功器负载从734 号计时点开始响应,考虑到采集频率为10Hz,所以水力测功器负载开始增加的时间比Wf 开始增加的时间滞后了1 秒),即发动机Wf 增加1 秒后,水力测功器才开始增加负载,导致水力测功器负载在短时间内小于发动机保持Np=100%所需的负载,从而动力涡轮转速超调较大。
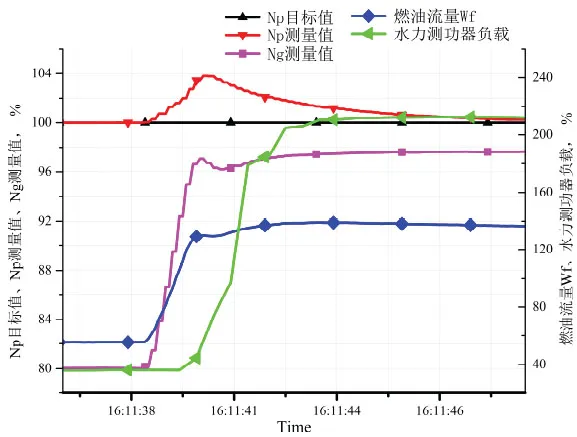
图3 状态切换时Wf、水力测功器负载、Np曲线图
对智能化试车系统的信号传输路径进行分析发现,XPC 信号分两路传输到EECU 和水力测功器。由于EECU有提前增加Wf 的机制,导致XPC 信号传输到EECU 时,EECU 控制发动机提前加油,以保证适应水力测功器做出负载变化;而水力测功器则在收到XPC 信号后负载变化响应较慢、跟随性差,两种信号路径造成的Wf 增加与负载变化响应的时间差过大,使开始以后很短的时间内,水力测功器的负载增加值会小于发动机功率的增加值,造成动力涡轮转速超调过大。
因此,可以通过调整XPC 与水力测功器的匹配性优化水力测功器和发动机的跟随性,即使得EECU 根据XPC 的改变计算的提前量产生的功率变化和水力测功器负载的变化能较好匹配,从而减少Wf 开始增加和水力测功器负载开始变化的时间差。
调整XPC 与水力测功器负载匹配值后,状态切换时Wf、水力测功器负载、Np 曲线图如图4 所示,当发动机状态从空慢状态切换到Ng=97.45%时,XPC 在1 秒内改变,当XPC 变化后,Wf 在0.3 秒后开始变化,水力测功器负载在0.8 秒后开始变化,二者时间差由之前的1 秒降低到0.5 秒,Np 超调量则由之前的3.8%降低到本次的1.38%。经试验验证,在调整XPC 与水力测功器的匹配性后,Np 超调量明显降低(降低63.7%),该方式可以有效解决动力涡轮转速超调过大的问题。
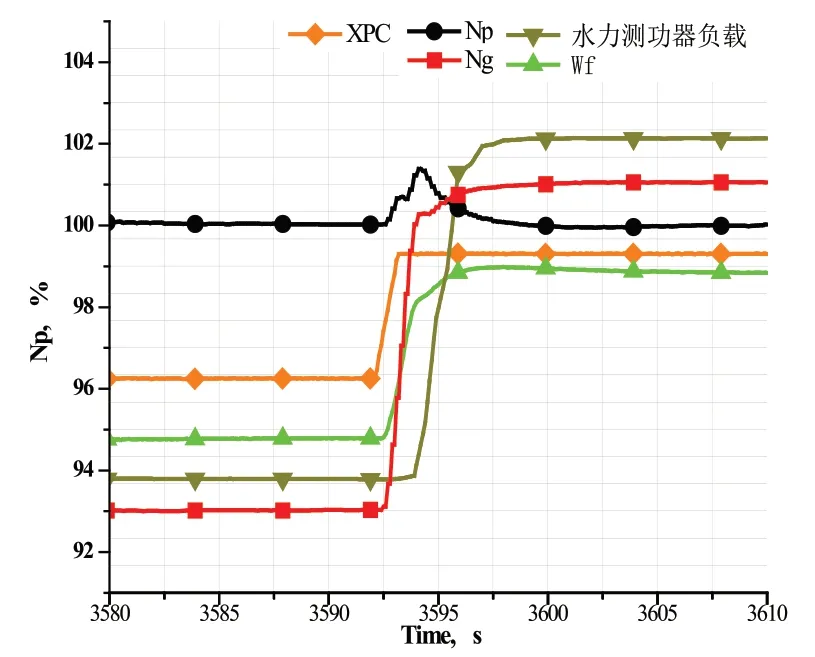
图4 调整XPC与水力测功器负载匹配值后,状态切换时Wf、水力测功器负载、Np曲线图
3 动力涡轮转速无法保持稳定
3.1 现象
研制团队利用智能化试车系统,按照加速任务试验的试验谱进行调试。按照试验谱要求,设置Np=104%,Ng从97.80%自动上推至99.48%,状态切换时,Np 出现了“下降、上升、保持”的现象,两次出现此现象后,试车员下拉发动机至飞行慢车,如图5 所示。
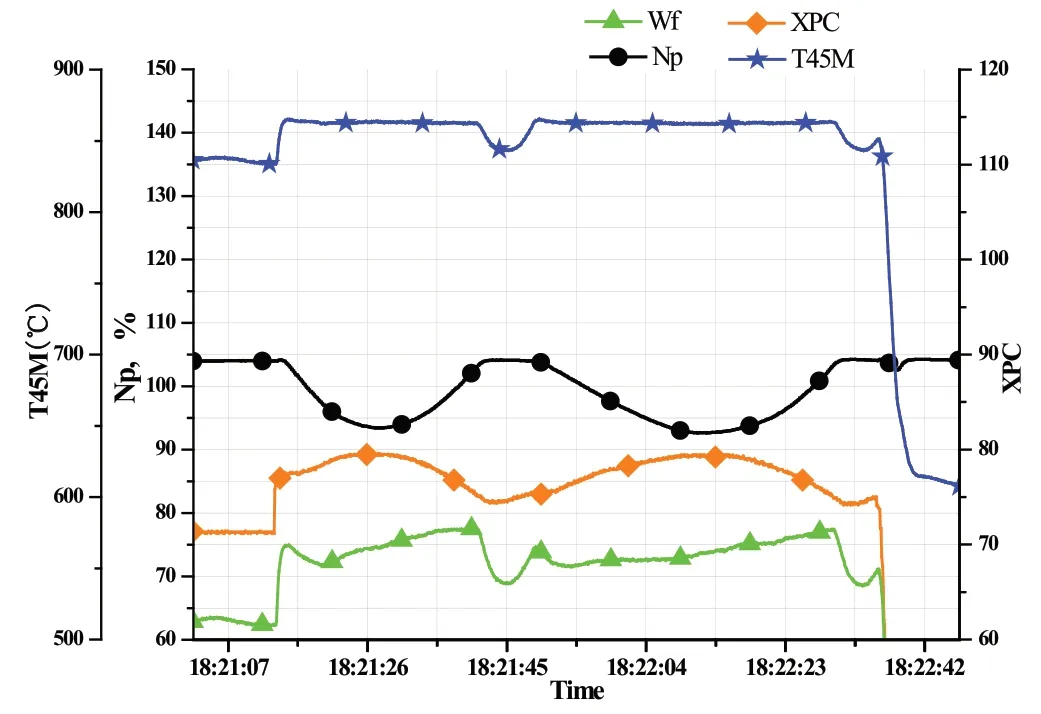
图5 Np=104%,Ng从97.80%切换至99.48%时Np无法稳定
但是,当设置Np=90%,Ng 从96.94%自动上推至99.34%时,试验过程中未出现上述Np 不稳定的现象,如图6 所示。
3.2 原因分析及措施
在图5 中,当智能化试车系统发出信号使EECU 增加Ng 时,EECU 控制发动机增加Wf,同时保持Np 不变,此时燃气涡轮出口处燃气温度测量值(T45M)相应增加。当T45M 增加到一定值时,保持该温度值不再上升,初步判断此时是因为EECU 控制软件设置了T45M限制值,导致EECU 控制发动机快速减小了Wf 的增加率,相应的Ng 增加缓慢。
但由于智能化试车系统的控制逻辑是通过控制试车台的XPC 角度改变水力测功器负载,进而依靠发动机的Np 控制模式使发动机改变Wf,达到改变Ng 的目的。在T45M 达到限制值时,由于Ng 尚未达到目标值Ng=99.48%,此时智能化试车系统会持续增加XPC 角度,导致水力测功器负载持续增加,但是发动机Wf 受限于EECU 控制,增加很少,导致此时发动机功率的增量无法抵消水力测功器负载的增量,从而动力涡轮转速持续减小。
在图5 中Np 第一次“下降、上升、保持”的过程中,当Np 在不断降低时,EECU 由于有包含Np 的闭环控制存在,虽然T45M 有限制,但仍会控制发动机不断缓慢地增加Wf,以提升Np 至设定值Np=104%,此时对应的Ng 缓慢上升。从图5 中可以看出,此次Np“下降、上升”过程中,Ng 最终缓慢增加到Ng=100.27%,高于智能化试车系统的目标值Ng=99.48%,当发动机Ng 高于目标值Ng=99.48%时,由于智能化试车系统有包含Ng 的闭环控制存在,系统将控制XPC 下降,以满足试验谱的Ng=99.48%的目标值要求。此时,随着XPC 降低,水力测功器负载对应降低,Np 逐渐上升。在Np 上升到104%前,EECU 仍会一直控制发动机增加Wf,直到最终Np 上升至104%。
整个Np“下降、上升”过程中,由于T45M 有限制,在两个闭环控制过程耦合的情况下,造成了在水力测功器负载增加过程中,发动机无法明显增加Wf,导致Np 出现“先降低后上升”的现象。
在图6 中可以看到,在达到Ng 目标值Ng=99.34%时,T45M 不高,说明在发动机T45M 达到限制值前,智能化试车系统就已经完成了状态切换,故未造成Np 转速不稳定的现象。
根据上述分析结论,对EECU 中T45M 限制值进行了检查并修改,在后续试验中,未再出现Np 无法保持稳定的情况。
4 结论
本文针对某型发动机在加速任务试验过程中应用智能化试车系统出现的问题,通过对发动机特性、智能化试车系统控制逻辑、发动机试车台结构及特性等进行分析研究,提出了具体的解决措施,有效解决了动力涡轮转速超调过大、动力涡轮转速无法保持稳定等问题,完善了该智能化试车系统,进一步提升了该智能化试车系统的适用性,推进了智能化系统的深入应用,促进了该型发动机加速任务试验的顺利进行。最终,在中国民航局适航审定中心的见证下,利用智能化试车系统圆满完成了加速任务试验,试验控制精度高、试验质量得到了良好的保证,有效避免了试验误操作且大幅减少了试验工作量。
本文中研究的两个问题对其他发动机应用智能化试车系统开展试验具有一定的借鉴意义。后续可以继续对发动机本体控制系统和智能化试车系统的匹配开展深入研究,进一步优化智能化试车系统本身的控制逻辑、安全保护机制等。
