事件触发下的网络化系统非脆弱耗散控制方案
2023-02-24张亚欣
葛 超,张亚欣,刘 月,王 红
(1.华北理工大学 人工智能学院,河北 唐山 063210;2.华北理工大学 电气工程学院,河北 唐山 063210)
0 引言
网络化控制系统(Networked Control System,NCS)一般主要包含传感器单元、控制器单元、执行器单元以及被控对象等功能节点。这些部件一般离散分布,并通过数字网络可实现远程的信息交互[1-3];但是由于网络自身的缺点,比如时间延迟、丢包、数据量化等问题[4-8],导致NCS 性能恶化,甚至失去稳定性。多数网络化控制系统采用基于周期采样机制(也称时间触发机制)的控制模式,所有的采样数据都通过网络进行传输,导致对资源不必要的占用。当采样周期是时变时,在最坏情况下,系统控制性能需求需要被满足。
为了解决时间触发机制带来的资源不必要的占用问题,在20 世纪90 年代,提出了事件触发机制[9]。当满足事件触发的条件时,采样数据被触发器传输。事件触发机制被证明是一个减少数据传输的有效方法[10-13],和时间触发相比,它可以减少网络带宽的占用以及控制器设计的计算成本。文献[14-15]中,事件触发依赖于对系统状态的持续监控,以检测当前状态是否超过触发阈值。要构建这类触发器,需要对现有系统进行彻底改造,但实现起来比较困难。因此,设计出自触发控制器;但是自触发机制对系统的配置要求比较高,需要提前给出系统模型,所以自触发方案难以被应用。文献[16-17]中提出一个事件触发机制去决定数据是否被传输,它不需要特殊硬件去连续不断测量。
外部干扰的出现会影响系统性能,而耗散性能[18-19]的提出在保证系统稳定性前提下满足了系统的性能指标。在实际系统中,任何控制器都会遭受一些不确定因素,比如不确定参数的影响,它可能会导致NCS 不稳定,因此研究控制器非脆弱性问题[20]也很有必要。文献[21]中研究了基于事件触发的网络化控制系统,但它只考虑了网络诱导延时问题,没有考虑控制器的非脆弱性。
综上,本文研究事件触发机制下的网络化系统非脆弱耗散控制。耗散控制满足严格耗散性能,非脆弱性考虑控制器加性摄动问题。研究新型的双边泛函,借助线性矩阵不等式(Linear Matrix Inequality,LMI)方法分析系统的稳定性和对控制器的设计。
符号说明 上标符号“T”代表矩阵转置,“-1”表示逆矩阵;矩阵“I”表示合适维度的单位矩阵;Rn、Rm分别表示n维和m维的欧几里得空间;diag{·}表示对角矩阵,col{·}表示矩阵的列;“*”表示为对称矩阵。
1 问题描述及事件触发控制
1.1 问题描述
考虑线性系统装置:
其中:x(t) ∈Rn是状态向量,u(t) ∈Rm是控制器输入向量,z(t) ∈Rm是控制器输出向量,ω(t) ∈L2[0,∞)是外部干扰,A、B、Bω、C是合适维度的常数矩阵。系统(1)的初始条件是x(0)=x0。
系统(1)的控制律为:
其中K是反馈控制器增益。
1.2 事件触发机制
一个事件触发机制通过非周期采样数据来建立传输事件机制。当采样周期为非均匀周期时,研究模型的建立、稳定性分析和控制器的设计具有重要意义。
本文考虑没有数据丢包发生的情况,采样器以hl为周期进行采样。通过事件生成器检测当前采样时刻和最后触发时刻tk之间的采样数据误差。下一触发时刻tk+1被设计为以下等式:
其中:e(il)=x(il)-x(tk)表示状态误差是当前采样时刻;定义ik作为下一次的采样时刻;hl=ik-il是非均匀采样周期;δ∈[0,1)和Φ分别是给定的阈值参数和设计的正定权重矩阵。
并非所有的采样数据需要通过事件触发机制传输,只有那些满足条件(3)的数据才能被传输。此外,采样数据传输的频率由δ和Φ决定。当δ=0 时,事件触发机制转变成时间触发机制。在每个采样时刻引入事件触发机制,以决定是否传输当前的采样数据。把零阶保持器中的保持间隔Ω划分成子区间,也就是Ω=∪Ωl(l=0,1,…,tk+1-tk-1)。
注1 当系统中考虑丢包发生时,要建立新的事件触发条件。
注2 式(3)提出的事件触发机制建立在非周期采样机制中,比一般的周期采样更具有普遍性和实际性。式(3)所设置的是离散事件触发机制,只在一个固定的采样周期测量状态、计算偏差,所以不需要额外硬件进行连续测量和计算。因为事件触发间隔必定大于最小的采样的周期,所以就直接避免了芝诺(Zeno)现象。
定义η(t)=t-il(t∈Ωl),控制律(2)被重写为:
对于t∈Ωl和t≠il+τil,η(t)是分段线性函数,满足
假设网络时延的上、下界已知,分别为τ1、τ2。根据式(5)中给出的,那么所允许的采样周期可以设置为:
得到hl∈[0,η]。
在实际生活中,网络化控制系统中控制器含有许多的不确定参数。当摄动矩阵ΔK(t)出现时,可以建立以下的实际控制律:
ΔK(t)是加性增益摄动,满足以下关系:
其中:H、E是给定的矩阵,F(t)是满足以下不等式的未知矩阵:
联立式(1)和(6),系统(1)可以被重新写作:
1.3 定义及引理
引理2[23]假设0 ≤η(t) ≤η,并且Ψ1、Ψ2、Ψ是合适维度的矩阵,如果存在那么
Ψ+η(t)Ψ1+(η-η(t))Ψ2<0
引 理3[24]给定合适维度的正实矩阵M3=,H、E、F(t) 满足M3+HF(t)E+(HF(t)E)T<0,对于F(t) 满足式(8),当且仅当存在一个参数ε>0 时,以至于M3+εHHT+ε-1ETE<0,或者。
2 稳定性分析及控制器设计
2.1 稳定性分析
利用Lyapunov 稳定性分析可以得到系统渐进稳定的充分条件。
注3V3(t)是双边泛函,只需要保证它在采样点是正定的,它的导数在采样区间内必然是负定的。不仅考虑区间[il,t],还考虑[t,ik],这会使所得到的结果具有更小的保守性。
对泛函求导,得到:
Π0和Γs(s=1,2,3,4)定义在定理1 中。根据引理2 和舒尔补引理,Ξ0<0 是Ξ1、Ξ2的凸组合,可以得到式(10)。由式(15)可得到式(16):
对式(16)两边从0 到tf求积分,得到
由式(17)可以得到严格耗散的定义1,系统是关于性能指标γ-严格耗散的且渐进稳定的。证毕。
2.2 控制器设计
应用定理1,在事件触发机制下的反馈控制器增益K可以被求得。
注4 值得注意的是,式(16)是非线性凸组合,因此不能被Matlab 里面的LMI 工具箱直接求得结果。在本文中,用一个简单的线性方法和一个锥补线性化(Cone Complementarity Linearization,CCL)算法来处理这些非线性项。可以得到:
对于XλI-1X项,本文用CCL 方法,定义G满足:
然后对式(18)进行求解,得到式a,式a 是把式(18)里面的非线性项用式(23)和(24)代替。以上最小化问题可以被CCL 算法解决。通过舒尔补原理,式(24)等价于:
算法1 CCL 算法。
第一步 寻找LMIs(式(18))和以下不等式的可行性解
设定k=0。
第二步 解决以下最小化问题。
联立式(18)和式(26)。
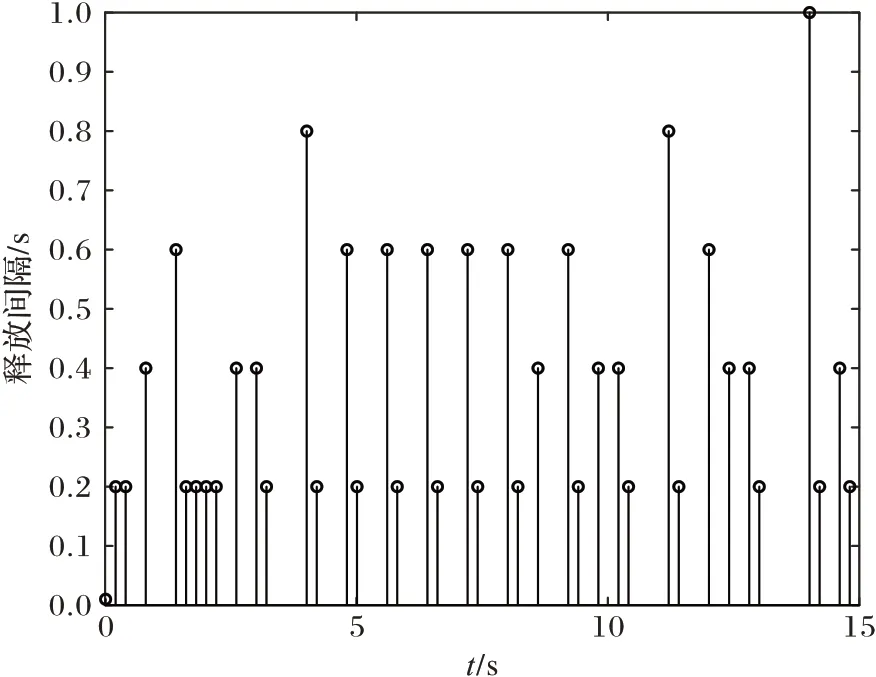
第三步 如果式(18)被满足,那么得到一个控制器K=YX-T。令k=k+1,如果k 例1 对于线性系统可以考虑以下参数: 在本例中不考虑耗散性能和非脆弱性,利用定理1,当Bω=0;ΔK(t)=0 时,对于不同的事件触发阈值参数δ得到时延η的最大上界,如表1 所示。 表1 文献[21]和本文在不同阈值参数δ所对应的时延η最大上界Tab.1 Maximum upper bound of time-delay η in literature [21] and this paper corresponding to different threshold parameters δ 由表1 可知,本文方法比文献[21]方法具有更小的保守性。 例2 考虑如下参数: 假设不存在外部干扰和非脆弱性,即ω(t)=0,ΔK(t)=0。系统可考虑为x˙(t)=Ax(t) +BK(x(t-η(t))-e(il)),在这个系统中应用事件触发机制,令δ=0.2,η=0.5,根据定理2,可求得反馈控制器增益K和事件触发矩阵Φ如下: 令初始值x0=[0.9,-0.7,0.2,0.3,0.6]T,对应的系统状态响应曲线如图1。 图1 多维系统的状态响应曲线Fig.1 State response curves of multi-dimensional system 观察图1,曲线逐渐接近为0,说明系统逐渐稳定。由此可以说明事件触发机制在NCS 中的可行性。 例3 考虑倒立摆系统,参数如下: 其 中M=10 kg,m=1 kg,l=3 m,g=10 m/s2。初始条件为x0=[0.98,0,0.2,0]T。 在此算例中考虑系统的严格耗散性能和非脆弱性。设ω(t)=0.01sin(2πt),Q1=-0.3I,R1=-0.1I,S1=I,γ=500,ΔK(t)=[0.2 sint,0.2 sint,0.2 sint,0.2 sint]。 情况1 令δ=0,在这种情况下,事件触发机制被考虑为时间触发,即正常的采样机制。根据定理2,求得最大时延上界为η=0.774。当η=0.489 时,此时求得增益K=[44.489 2 104.361 4 987.607 7 563.741 7]。对应得到的状态反应曲线如图1 所示。令采样周期h=0.2,在t∈[0,15]区间内,所有的75 个采样数据都要被传输过去。图2 为在采样控制时得到的状态响应曲线。 图2 情况1的状态响应曲线Fig.2 State response curves of case 1 情况2 令δ=0.2,此时所用的机制为事件触发机制。在此情况下,根据定理2,求得时延的最大上界η=0.489,对应的反馈控制器增益K和事件触发矩阵Φ为以下结果: 对应K和Φ的系统的状态反应曲线如图3 所示。 图3 情况2的状态响应曲线Fig.3 State response curves of case 2 从图3 中看出曲线逐渐接近于0,说明系统逐渐稳定,可以很容易看出,本文设计的关于事件触发的控制器是有效的。 图4 表示系统的传输瞬间和释放间隔。令采样周期h=0.2,在t∈[0,15]区间,只有40 个采样数据被传输,传输率为53.3%,并非所有的采样数据被传输。 图4 传输瞬间和释放间隔Fig.4 Transmission instants and release intervals 通过情况1 和情况2 的对比来看,可以证明,事件触发机制可以减少采样数据的传输,从而节约带宽资源。 本文研究了基于事件触发机制的网络化系统非脆弱耗散控制。采用事件触发通信机制,在网络化系统上进行建模,考虑加性摄动非脆弱性和严格耗散性能,在此模型上,使用新型改进的泛函使得稳定性结果具有较小的保守性。并给出了控制器的设计过程,求得控制器增益和事件触发机制矩阵。事件触发机制的引入,减少了采样点的传输,节约了带宽资源,数值仿真结果证明了本文设计方法的有效性。3 仿真算例




4 结语