考虑决策者心理行为的直觉模糊三支决策方法*
2023-02-23张丽娟耿秀丽
张丽娟,耿秀丽
(上海理工大学管理学院,上海 200093)
0 引言
多属性决策(Multiple Criteria Decision Making,MADM)是决策理论的重要研究内容,通过选定的决策方法得到完整的方案排序。但由于现实生活中决策情景的复杂化以及决策者主观思维的模糊性和不确定性,传统二支决策方法(即只划定接受和拒绝)的局限性也越来越明显。基于此,国内外的研究学者对传统的多属性决策进行了拓展,包括在二支决策中引入延迟决策,提出了三支决策(Three-Way Decisions,3WD)的概念。
三支决策是由YAO等[1]基于决策粗糙集理论模型(Decision-Theoretic Rough Sets,DTRSs),进一步结合决策情景而提出的一种决策理论。它成功地为粗糙集的正域、负域和边界域合理地赋予了语义解释[2]。三支决策的关键在于损失函数和条件概率的确定,在损失函数的评估方面,当前大多数决策粗糙集模型中的代价损失函数都是以精确数值形式给出,但在实际决策过程中决策者往往很难对损失函数给出具体的实值评价,而相对容易给出不确定的形式[3]。针对此问题,本文利用直觉模糊在处理模糊性和不确定性问题时的灵活性和实用性优势,去表达损失函数中的模糊信息。
在条件概率的确定方面,LIU等[4]依据决策专家的主观经验给出条件概率,缺乏可解释性和可参考性;LIANG 等[5]基于犹豫直觉模糊,利用熵与交叉熵的概念确定条件概率;高杨等[6]基于损失函数矩阵,选取改进多准则妥协解排序(VIKOR)方法得到目标的折衷排序值以估计条件概率;DENG 等[7]参照模糊β邻域的概念进一步得到各备选方案的条件概率,应用范围广并且可行性强。本文参考文献[7]的方式,先通过多数原则确定状态集,把所有备选方案分成两类,结合基于模糊覆盖的模糊粗糙集确定条件概率。
损失函数和条件概率确定之后,依据三支决策的决策规则完成各备选方案决策域的分类。孙作雨等[8]提出了基于TOPSIS 的三支决策评价模型,通过检测评价对象与最优解、最劣解的距离进行排序,基于此得到最终的三支分类结果。高杨等[6]针对在复杂动态任务环境需要主观做出判断的情形下,提出了基于VIKOR 和三支决策的多目标威胁评估方法,结合计算所得的综合阈值和条件概率生成决策规则。这些研究成果大多依靠决策者主观去做出判断,交互式多属性决策(Tomada de Decisao Interactiva e Multicritévio,TODIM)方法是一个基于前景理论基础上的行为决策方法,充分考虑到了决策者的心理行为,通过直接选用其他比较方案的指标值作为参考点[9]。因此将TODIM 应用在三支决策中,可以使得决策更符合决策者的有限理性,从而能够帮助决策者做出更加可靠的决策。
本文针对多属性决策问题,在直觉模糊决策环境下将决策者的心理偏好引入三支决策,提出了一种基于TODIM 的三支多属性决策方法。在决策粗糙集的基础上,根据各备选方案各属性的评价信息表,得到多属性聚合损失函数矩阵,进而得到相对损失函数。根据计算所得各方案的条件概率,参考TODIM 得到各方案三种行动(即接受,延迟和拒绝决策)的综合感知优势度,并建立三支决策规则,得出方案属于接受域、拒绝域还是延迟决策域。最后,通过一个算例来验证本文所提出方法的有效性和合理性,且与前人的决策方法进行对比分析,进一步验证本方法的有效性。
1 理论基础
1.1 直觉模糊集
定义1[10]设U={x1,x2,…,xn} 是非空有限的对象集,称为论域。集合称为直觉模糊集,μ(x)和(x)分别称为对象x属于U的隶属度和非隶属度。也即:

其中0 ≤μ(x)+v(x)≤1,另外πA(x)=1-μ(x)-v(x),代表直觉模糊集A中元素x的犹豫度或者直觉模糊指标。U上的全体直觉模糊集所构成的集合记为IF(U)。
直觉模糊集中的元素称为直觉模糊数。通常情况下,直觉模糊数可以用表示,简记为分别表示两个直觉模糊数时,其得分函数[12]和距离测度[13]表示如下:

1.2 三支决策基础
设U是有限非空集合,R⊆UU是定义在U上的等价关系,apr=(U,R)是粗糙近似空间,U可以被等价关系R进行划分,设定阈值满足0,∀C⊆U是概率粗糙集的上近似和下近似集分别为:


为了赋予三个域合理的语义解释,YAO结合Bayesian最小风险决策理论,提出决策粗糙集理论包含两类状态和三种行动。设Ω={C,¬C} 是状态集,状态集包含目标的两类状态,分别表示目标属于或不属于C。A={ap,aB,aN} 为行动集,行动集包含三种行动:ap表示x∈POS(C),aB表示x∈BND(C),aN表示x∈NEG(C)分别代表接受、延迟和拒绝决策三种行动。假设不同状态下采取的不同行动所带来的风险损失以直觉模糊数值的形式给出,即(i,j=P,B,N),具体详见表1。

表1 直觉模糊风险损失函数矩阵
在表1中,λPP,λBP和λNP分别表示当目标属于C时,采取行动ap,aB和aN所对应的损失值;λPN,λBN和λNN分别表示当目标不属于C时,采取行动ap,aB和aN所对应的损失值。通常损失函数满足0 ≤λPP≤λBP<λNP和0 ≤λNN≤λBN<λPN。可以得到决策粗糙集的三支决策规则:
(P):如果Pr(C|[x])≥α和Pr(C|[x])≥γ成立,则有x∈POS(C)。
(B):如果Pr(C|[x])≤α和Pr(C|[x])≥β成立,则有x∈BND(C)。
(N):如果Pr(C|[x])≥β和Pr(C|[x])≤γ成立,则有x∈NEG(C)。
其中各阈值分别为:

令β<α,则三支决策规则为:
(P1):如Pr(C|[x])≥α成立,则x∈POS(C);
(B1):如β<Pr(C|[x])<α成立,则x∈BND(C);
(N1):如Pr(C|[x])≤β成立,则x∈NEG(C)。
2 直觉模糊信息下基于三支决策的多属性决策方法
2.1 算法的主要流程
本文所提方法改变了传统“非此即彼”的方案决策模式,同时考虑到决策者具有参照依赖和损失规避行为,提出了直觉模糊信息下考虑决策者心理行为的三支多属性决策方法。根据三支决策,实现基于“接受-延迟-拒绝”模式的决策分类,核心包括计算各方案的损失函数和条件概率,结合TODIM 推导决策规则,计算流程如图1所示。
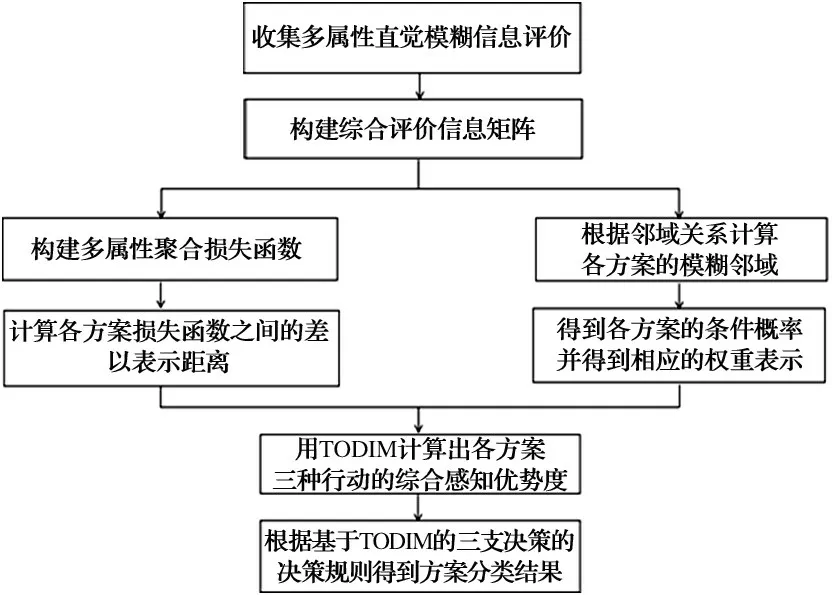
图1 计算流程图
2.2 损失函数表示
损失函数的构成涉及两种状态和三种行动,方案的两类状态分别表示属于或不属于C,三种行动{ap,aB,aN} 分别表示接受决策,延迟决策和拒绝决策。λPP,λBP和λNP分别表示x属于C时,决策ap,aB,aN的损失函数值,λPN,λBN和λNN分别表示x不属于C时,决策ap,aB,aN的损失函数值,由此,构建出多属性聚合损失函数矩阵。具体步骤如下。
步骤1 构建直觉模糊信息评价矩阵
假设各属性的评价信息值以直觉模糊数的形式给出,备选方案集X={X1,X2,…,Xm},属性集C=为评价信息矩阵的集合。则多属性综合直觉模糊评价信息聚合为
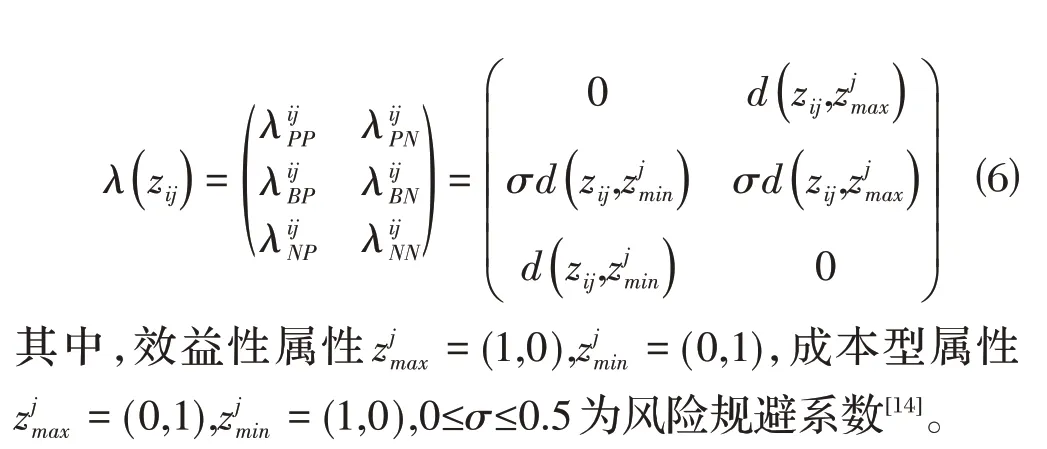
步骤2 构建并表示各方案的相对损失函数矩阵
根据公式计算出各直觉模糊数的距离测度,结合风险规避系数σ得到各方案的相对损失函数矩阵如下:
步骤3 构建多属性相对损失聚合矩阵
进一步结合属性权重因子ωj,可获得方案xi的多属性相对损失矩阵表示如下:

2.3 条件概率计算

定义4假设一个元组S=(U,A∪{d})是一个多属性决策信息系统,决策属性d的值域表示为Vd,根据决策的属性值,所有对象可以分为两类:
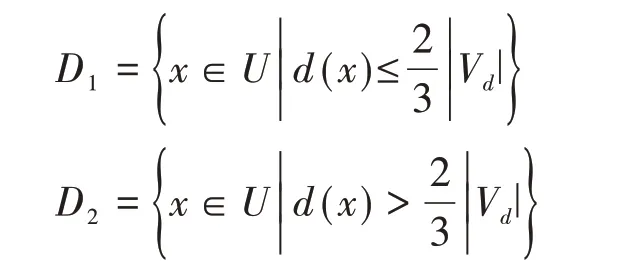
多数原则中2/3 是决策属性评估值的临界点,多数原则在生活中随处可见,比如在干部选拔过程中,得票超过一半的人就能保证晋升,合格率在2/3 以上就能确定备选方案的资格等。因此,通过把对象分为D1和D2,分别对应于三支决策里的“好状态”D1和“不好状态”D2。在不引起任何混淆的情况下,把D1和D2分别表示为D 和≠gD。通过多数原则可以表示出条件概率,其中Pr(≠gD|[x]σ)+Pr(D|[x]σ)=1。

条件概率计算步骤如下:根据决策属性值的2/3原则分类,把各备选方案分为D 和≠gD两类。再根据定义3中模糊β邻域的概念去计算各方案条件概率。
2.4 三支决策规则生成
在决策过程中,决策者面对收益和风险时,更倾向于规避风险。本节利用TODIM 方法推导三支决策规则。
条件概率PP=Pr(C|x)和PN=Pr(¬C|x)=1-Pr(C|x)=1-PP表示的相对值为:

其中,j=P,N,Pr={PP,PN} 。⑴当PP>0.5时,Pr=PP,此时:

由公式表示各方案下行动am与al的优势度∅j(am,al)(j=P,N),R指收益集合,L指损失集合。计算公式为:

其中,m∈{P,B,N},l={P,B,N},θ表示损耗衰退系数。因此对应三种情况下的优势度分别为:

参考TODIM 方法,表示出各方案行动am对al的综合感知优势度为:

那么行动am的综合感知优势度为:
基于此,我们可以分别计算出各方案三种行动的综合感知优势度为:

最后,建立如下的三支决策规则:
(P1)如果同时满足φ(aP)≥φ(aB)和φ(aP)≥φ(aN),则x∈POS(C)。
(B1)如果同时满足φ(aB)≥φ(aP)和φ(aB)≥φ(aN),则x∈BND(C)。
(N1)如果同时满足φ(aN)≥φ(aP)和φ(aN)≥φ(aB),则x∈NEG(C)。
3 案例分析
随着我国市场经济不断发展,投资项目日渐增多,现企业准备将一笔资金投资给若干个工业机器人产品去进行开发改进,为此,该企业成立了一个评估委员会来商讨并作出决定。本节通过一个具体实例验证所提方法的有效性。
3.1 算例计算
现有七个工业机器人产品开发项目参与其中,委员会决定主要从四个方面去进行评估。设可选择备选方案集合为X={X1,X2,…X7},评价指标有4个,记作C={c1,c2,…c4},分别为灵活度(C1),承载力(C2),作动范围(C3)和作业效率(C4),属性的权重向量由评估委员会协商一致确定,记作ω={ω1,ω2,ω3,ω4}={0.3,0.1,02,0,4}。σ 是风险规避系数(0≤σ≤0.5),σ取值越大,表示掌握的评估信息越充足,本文折中设定为0.3。θ是损耗衰退系数,通常情况下,1≤θ≤2.5,选取较大的θ值则总体优势度相对大的方案即使在一些方案上有损失,但同时可以提供更大的收益,本文θ值设为2.5。通过综合评估得到最终的评价信息收集如表2所示。

表2 综合多属性评估信息表
根据公式可以计算出距离测度,从而可以得到多属性相对损失函数信息如表3所示。

表3 相对损失函数信息表
根据相对损失函数进而得到收益集合R和损失集合L如表4、表5所示。同时各方案属性的评估得分函数如表6所示。
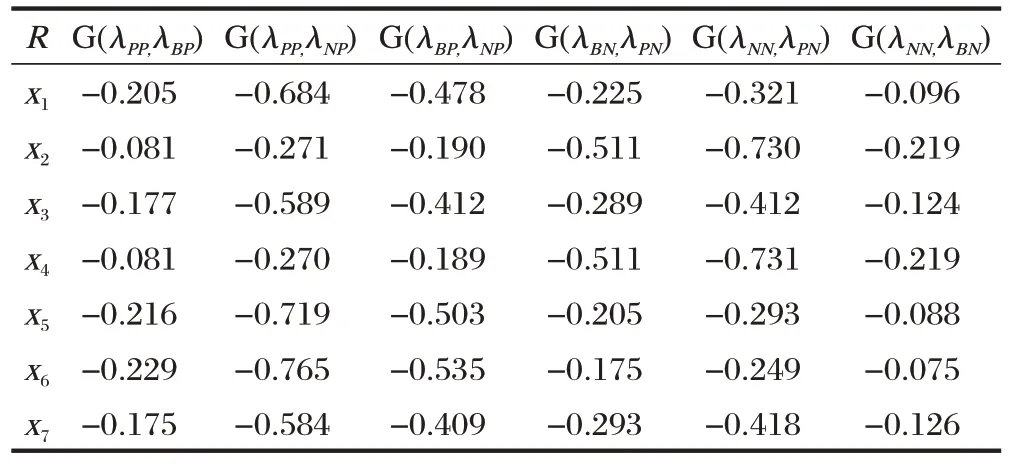
表4 收益集合

表5 损失集合

表6 各属性的评估得分函数
同时,根据定义4 和决策属性把所有的对象分成两类,即D={x1,x5,x6} 和¬D={x2,x3,x4,x7} 。根据定义4,C={C1,C2,C3,C4},可以看作是U的模糊β邻域覆盖(0<β≤0.48),可以计算出所有的模糊β邻域如表7所示。

表7 各属性的模糊邻域覆盖
从而可以得到:

然后得到条件概率如表8所示。

表8 各方案的条件概率
借助TODIM 公式生成决策规则。根据公式可以计算得到行动am对al的综合感知优势度,进一步得到方案接受、延迟和拒绝三种行动的综合感知优势度如表9 所示。最后根据⒁-⒃可以得到最后的分类如 表10 所 示:POS(C)={x1,x5,x6},BND(C)={x3,x7},NEG(C)={x2,x4} 。结果表明,x1,x5,x6为考虑投资的三款工业机器人,x3,x7为需要进一步考察的两款,x2,x4为直接不予投资的两款。根据分类结果可以优化投资资源的使用,为进一步投资做有效的考量。

表9 各方案的综合感知优势度

表10 方案决策分类结果
3.2 比较分析
为了验证所提方法的有效性和可行性,TOPSIS和三支决策结合的多属性决策方法,TOPSIS和三支决策的结合主要是构建多属性聚合损失函数矩阵,通过聚合损失函数矩阵计算出目标决策阈值和条件概率,从而获得决策分类结果。根据本文案例,基于TOPSIS的三支多属性决策方法可以得到各备选方案的决策阈值和条件概率如表11所示,从而得到最终分类结果。

表11 方案的决策阈值与条件概率
由表11可知,运用三支决策结合TOPSIS方法得到的方案分类结果为POS(C)={x1,x5,x6},BND(C)={x3,x7},NEG(C)={x2,x4} 。与本文所用方法计算所得结果几乎一致。存在差异是由于损耗衰退系数θ取值的不同,不同的θ取值下方案排序也存在差异。同时TOPSIS方法是基于完全理性的,没有考虑到决策者的有限理性,而TODIM 方法可以捕捉到决策者的心理行为,从决策者的角度出发也更加具有说服力,使得分类结果更加合理。通过比较也证实了将TODIM 和三支决策结合去进行决策时,选取较大的损耗衰退系数θ更合理。
4 结论
由于传统的多属性决策方法通常是二支决策,只能得到方案的排序结果,无法得到客观的分类结果。本文基于三支决策思想研究,提出了基于直觉模糊和TODIM的三支多属性决策方法,创新点在于:
⑴针对三支决策模型中的损失函数都是以精确值形式给出,无法有效表达模糊信息。采取直觉模糊集和多属性决策理论结合,兼顾了直觉模糊集良好的不确定性表征能力和多属性理论较高的决策评估精度。
⑵针对实际决策过程中决策者具有参照依赖和损失规避心理行为,将TODIM 与三支决策结合表达决策规则,充分地考虑到了决策者的心理行为,得到更加准确合理的决策结果。