时差法测流的非均匀流场流速模型及算法实现
2023-02-23曲金秋褚泽帆朱健勇
曲金秋,宗 泽,褚泽帆,朱健勇,王 猛
(1.水利部南京水利水文自动化研究所,江苏南京 210012;2.水利部水文水资源监控工程技术研究中心,江苏 南京 210012)
我国水安全保障体系和国家水资源监控体系的推进,对流速流量的测量方法和测量精度提出了更高的要求[1]。时差法测流系统在水利水文河渠流量监测领域中应用广泛,是常用的高精度流量监测仪器之一,为江河湖库流量宏观调控和生态流量管控提供了重要的数据支撑。
借助超声波实现水位、流速和流量等水文要素的在线监测是目前主流的研究方向[2-4],水文要素的主要测量仪器包含走航式或定点式声学多普勒流速仪(Acoustic Doppler Current Profilers,ADCP)、超声波测深仪、时差法流量监测系统三种[5-7]。目前超声波时差法流量在线监测设备严重依赖进口,在实际使用过程中发现,其对于国内水文特征复杂的河流流量监测存在缺陷,运行过程中会出现数据丢失、信号中断等问题[8]。因此,研发出自动化、适应性强、精度高并具有自主知识产权的超声波时差法测流系统具有重要意义。
时差法测流常用的流速计算模型为均匀流假设计算模型[9-10],对于管道和小型渠道应用尚可,但对于较宽河渠,由于糙率、摩擦力和势能等共同作用,在不同起点距的流速有较大差异,河道越宽,此现象越明显[11-12]。因此,文中提出一种非均匀流场流速计算模型,该模型在较宽河道中可解算出更准确的流速。基于该模型的推导,采用任务管理能力强、性价比高的ARM 处理器和并行运算能力强、运行速率高的FPGA 处理器[13-15],设计专用的硬件平台,进行模型算法的开发,并将其在时差法测流系统中做嵌入式应用,取得了良好的效果。
1 系统总体方案设计
文中系统分为主机和从机两部分,分别安装于河流两岸,主机和从机通过射频电台进行数据通信,控制安装于水下的超声波传感器发射和接收声信号,经信号处理和数据模型解算,实现流速、流量的监测,可同时外接水位计、水温传感器等,用于获取水位、定点水温等水文数据。因此,该系统的实现需要设计非均匀流场流速计算模型算法、专用的硬件设备和可实现算法的软件平台。系统总体架构如图1所示。
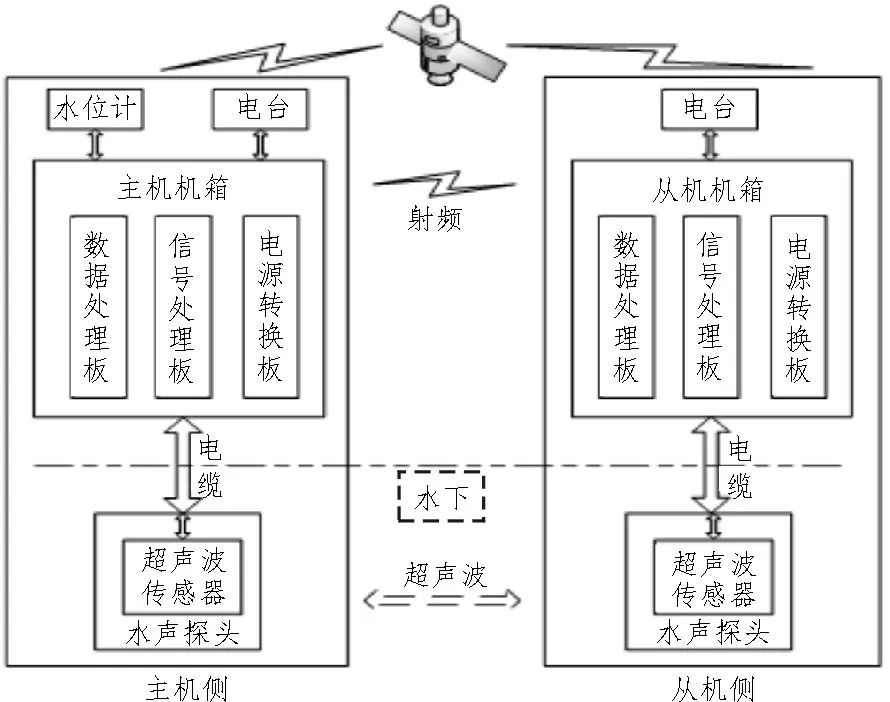
图1 系统总体架构图
主机和从机结构近似,包含水上的机箱和水下的超声波传感器,机箱和传感器通过电缆相连,机箱内硬件设备为可拆分式层级结构,由供电装置、数据处理、信号处理、远程通信、显控等几部分构成。非均匀流场流速计算模型算法需在软件平台中实现,然后将此软件平台移植于硬件设备中。在系统开发阶段,将超声波传感器置于30 m 宽的河道两侧的水下1 m 深处,并呈一定夹角,通过对比真实流速和该系统测得的流速验证系统的准确性。
在实际应用过程中,河流的流速为非均匀流态,因此为了提高该系统的实用性和准确度,设计了非均匀流场下的流速模型算法,并设计专用的硬件设备,而后搭建软件平台以供算法的实现和数据的解算。硬件设备包含数据处理板、信号处理板、电源转换板和液晶显示器,数据处理板采用ARM 核心模块加底板的结构,信号处理板采用ARM+FPGA核心模块加底板的结构。为了满足该系统的功能要求,底板均划分为多个模块进行设计。设计好的超声波时差法测流系统可用于明渠和大江大河的流速、流量和水位等水文数据的监测,并将监测数据于液晶显示屏或Web界面显示。
2 算法设计
对非均匀流场流速计算模型的推导可建立在均匀流场计算模型的基础上。
2.1 均匀流场流速模型算法设计
在河流上、下游固定点之间,超声波在顺流和逆流传播时产生时间差,测出时间差即可测得水流平均速度[16],原理如图2 所示。

图2 超声波时差法测流原理图
将一对超声波发射/接收传感器分别安装在两岸上下游A 和B 处,两个超声波传感器的安装角度为θ,它们之间的直线距离为L,河道宽度为D。流速不为0 时,到达超声波接收传感器的超声波信号是超声波波束中与轴线有一定夹角δ的信号。
用c表示超声波声速的大小,u表示河流的速度,假设水流沿着x方向,则流速,流速随着河道位置变化,因而与y有关。假设u<<c,顺流时超声波到达对岸耗时t1,逆流时耗时t2,则根据两者时间差可计算河流平均速度。
声线满足的动力学方程为:

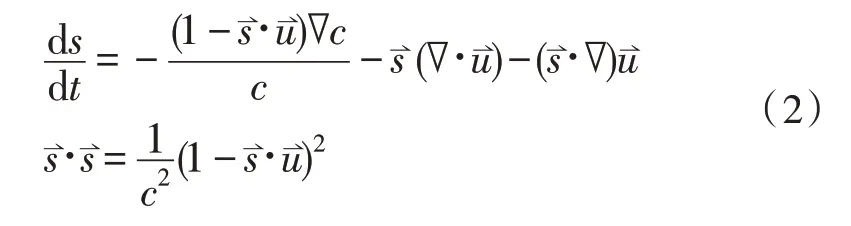
为慢度矢量,方向为声波的传播方向,大小为速度的倒数,满足的方程为:
定义两个无量纲的量:

超声波收发传感器位于同一水平面,此时声速不随位置变化,即∇c=0,可得sx=const,sz=0,根据式(2)和(3)可得s的y分量:

代入式(1),可得:

l为声线在水平方向所走过的距离,对安装角度为45°角的情况,l=D,经过积分,利用河道宽度和安装角度等已知量可以确定常数ω的大小。由式(5)可得出:

超声波收发传感器安装角度θ满足tanθ=D/l。若已知0 <θ<π/2 及β=β(y)的具体函数形式,则通过级数展开近似求解,可以得出一阶近似解。
对均匀流速情况,ux=u0,利用式(6)消去ω可以得到:
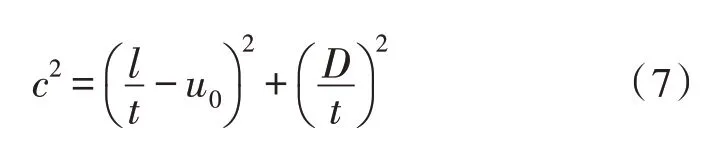
由顺流时(u0>0) 超声波传输时间t1和逆流时(u0<0)超声波传输时间t2可以解出河流速度:

式(8)为均匀流场下流速的严格解。
2.2 非均匀流场流速模型算法设计
在非均匀流场情况下,考虑水中声速c为1 500 m/s,水流速度0~10 m/s,因此β<<1。所以下面仅需考虑β的一阶项,忽略高阶项。
根据式(6)可算出声波的传输时间t为:

由此可见,由t、l、D和c就可以确定平均速度。但是,水中的声速对温度变化较敏感,比如当水温从0~40 ℃变化时,声速在1 400~1 500 m/s 范围内变化。所以分别测量顺水和逆水的超声波传播时间,从而消除c的影响,直接计算得到平均流速的值。在式(9)中,由顺流时(ux>0)超声波运行时间t1和逆流时(ux<0)超声波运行时间t2可以计算得到非均匀流场下流体的平均速度:

3 系统硬件设计
为了实现非均匀流场下的超声波时差法测流系统设计,且满足其实用性要求,开发了专用的硬件电路平台,并将非均匀流场流速算法代码化和模块化后移植于时差法测流系统中做嵌入式应用。
3.1 硬件原理图设计
该系统硬件包含分别置于河流两岸的主机与从机,主、从机硬件结构一致,均为数据处理板、信号处理板加电源转换板的可拆分式层级结构,具体模块划分如图3 所示。数据处理板主要用于实现主从机通信、数据存储、水位信息采集、与信号处理板通信、液晶显示及模型计算等功能。信号处理板主要用于驱动传感器发送声波、接收处理信号、测量时差、记录波形数据与数据处理板通信等功能。电源转换板主要用于提供各模块所需的不同电压和整机电源管理。数据处理板的ARM核心模块型号为FETMX6UL,信号处理板的ARM+FPGA 核心模块型号为MZ7020。

图3 硬件模块划分图
3.1.1 降压转换电路设计
电路中比较重要的降压转换电路为5 V 转3.3 V电路。该系统的SD 卡存储电路、RTC 时钟电路和以太网通信电路等均需要3.3 V 供电,因此需要将上级5 V 电压转换成3.3 V 用于模块供电,电路设计图如图4 所示。
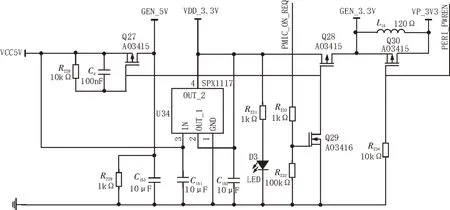
图4 降压转换电路
U34 为电压转换芯片,5 V 输入电源经过自恢复保险及防反接电路,经电压转换芯片转换为三路3.3 V,这三路3.3 V 电压分别给不同模块供电。PMIC_ON_REQ 引脚和PERI_PWREN 引脚为ARM 核心板引脚,通过控制这两个引脚的高低电平控制MOS 管的通断,进而控制三路3.3 V 的输出与否,保证了核心板先上电,其他模块后上电。
3.1.2 串口通信电路设计
该系统需要接入水位计、超声波传感器等外接传感器,这些传感器的接口多为RS485,RS485 接口具有节点多、传输距离远和抗共模干扰强等特点,因此该系统使用RS485 串口方式实现与水位计、超声波传感器等传感器的通信。电路设计图如图5所示。
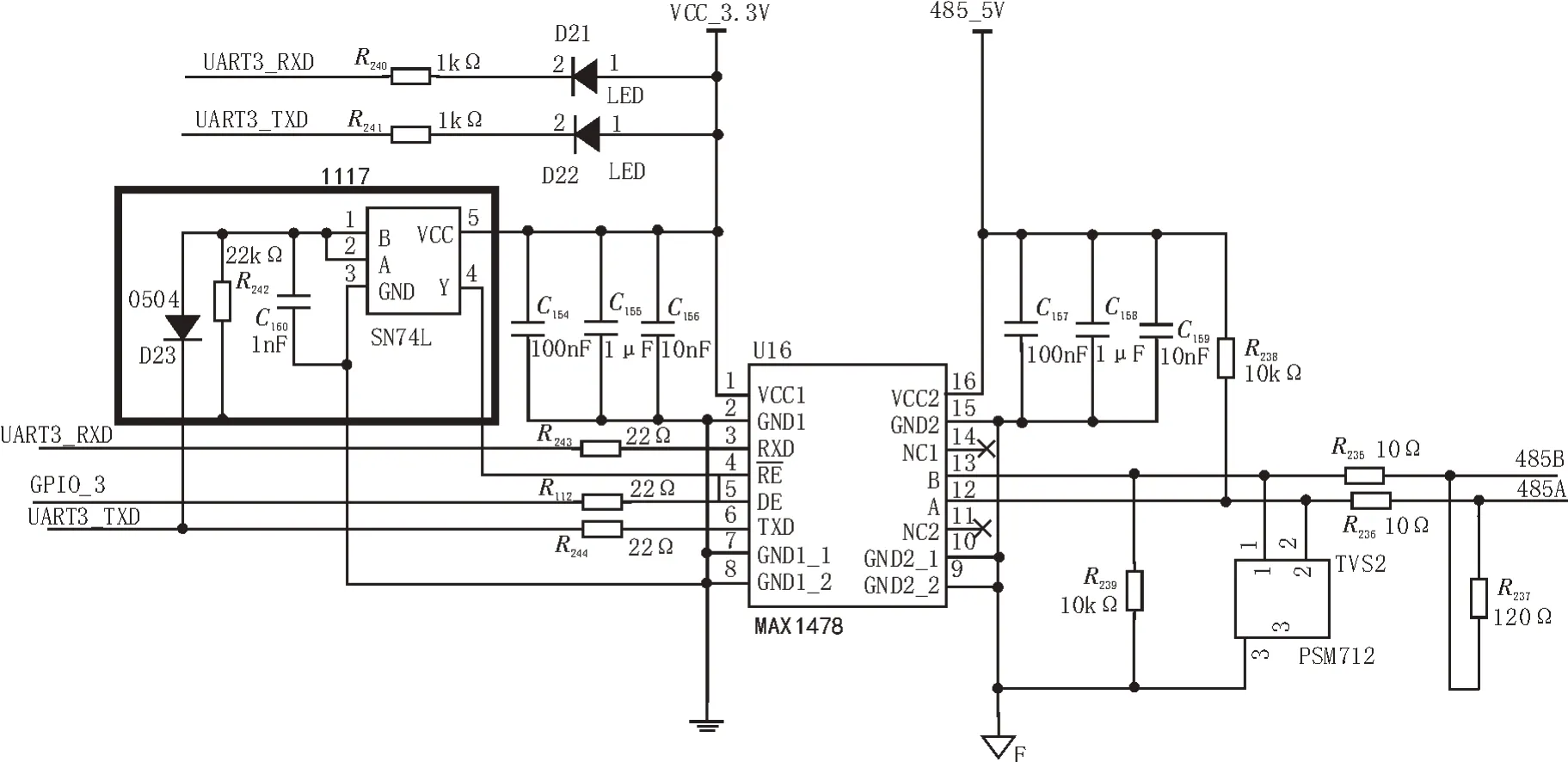
图5 RS485串口通信电路
U16 为RS485 芯片,实现TTL 信号与RS485 信号的转换,4、5 引脚分别控制芯片的接收和发送状态,芯片的常态为接收状态,只有当4、5 引脚均为高电平时,芯片才处于发送状态。黑色矩形框内为零延迟状态切换设计,可以保证芯片在发送完数据后及时切换回接收状态。此RS485 串口电路具有抗干扰能力强、通信速度快等特点,有助于与水位计、超声波传感器等传感器的及时通信。
3.2 硬件调试
该系统的硬件调试分两步,先将各模块按功能进行功能调试,然后将软件平台移植后进行总体调试。将数据处理板、信号处理板和电源转换板按顺序组装,先对SD 卡电路的存储功能、以太网电路的传输功能、GPS 电路的校时功能、液晶电路的显示功能和其他各电路的不同功能进行模块化功能调试;然后将实现了非均匀流场下流量计算的软件平台移植于硬件设备中,得到完整的非均匀流场下的超声波时差法测流系统。
4 软件平台的搭建
非均匀流场下的超声波时差法测流系统需要搭建可实现非均匀流场流速计算模型算法的软件平台,并移植于自主设计的硬件设备中,获得当前流场的流速,从而验证系统的可行性,以实现完整的非均匀流场下的超声波时差法测流系统。软件平台的搭建主要分为非均匀流场流速计算、传感器信息采集、FPGA 信息交互和断面流量计算四部分,软件功能结构图如图6 所示。
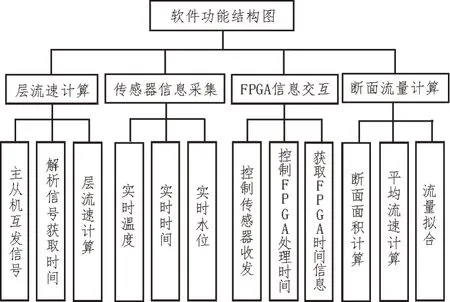
图6 软件功能结构图
4.1 非均匀流场流速计算
根据非均匀流场下流速算法设计软件流程并编写代码,流程如图7 所示。主、从机系统初始化完成后,主机侧执行测量指令,向从机侧发送超声波信号,从机获取超声波信号后进行解析,提取出传输时间t1并回传给主机;从机侧执行测量指令向主机侧发送超声波信号,主机获取超声波信号后进行解析,提取出传输时间t2,并读取已知的河宽D和夹角θ,最后根据式(10)计算出层流速。

图7 算法软件设计流程图
4.2 传感器信息采集
超声波时差法测流系统的传感器包含收发超声波信号的超声波传感器、测温的温度传感器和测量水位的水位计,其中温度传感器内置于超声波传感器中。
水位计定期采集水位信息,超声波传感器受脉冲信号控制,当信号处理板接收到脉冲信号后,控制超声波传感器发射并接收信号、标记时间和采集温度,然后将测量结果回传给信号处理板,从而获取流速、温度和水位等水文数据。
4.3 FPGA信息交互
ARM 微处理器通过SPI 与FPGA 交互通信,控制FPGA 在发射超声波信号后,利用收发转换开关,将超声波传感器从发射状态切换到接收状态,并控制FPGA 处理时间序列,获取处理后的时间信息。超声波发射信号采用调制的方式,超声波传感器发送特定变化规律的调制信号调制载波,使得已调信号频率接近超声波发射传感器固有频率,并在其有效工作特性范围内。
4.4 断面流量计算
断面流量计算主要实现断面面积以及平均流速的计算,并据此实现流量拟合。
测量断面上重要垂线的数据和断面宽度数据,由数据处理拟合关系方程计算出断面面积。根据历史资料、现场率定数据及仪器安装位置,建立层流速与断面平均流速的关系模型,计算出平均流速。根据断面面积和平均流速求出断面流量。
5 系统运行与测试
该系统目前已经应用于南京、重庆和攀枝花等多个水文站点,用于对流速、流量测量的准确性进行验证。以重庆泰安水文站为例说明该系统的运行及测试情况,重庆泰安水文站的河流两岸装有主从机、太阳能及装有硬件设备的机箱。
太阳能给机柜内的电池充电,机柜内的硬件设备控制安装于河两岸水下的超声波传感器收发信号,经过解算后求解出流速和流量,通过设备自带的液晶显示屏显示或通过网络上传至Web展示界面。
分别在清、浑、低、中、高水期间进行试验,系统运行稳定。通过ADCP 所测流量与该系统所测流量进行对比,图8 所示为2020 年6 月份的比测结果图,由图8 可知,数据一致性较好。

图8 该系统与ADCP所测流量对比图
在检测期间监测到洪峰过程,通过和缆道流速仪所测数据进行一次数据对比,流量误差小于4%。经过数月的数据比测发现,文中系统符合非均匀流场下的超声波时差法测流系统的实用性和准确性要求。
6 结论
文中针对非均匀流下流速、流量监测的难点和要求,进行了非均匀流场下的超声波时差法测流系统的流速算法设计、软件平台搭建和硬件设备设计。对完整的系统测试运行后,通过比测结果证明该系统在明渠和大江大河中,数据测量准确、实用性高,在河流流速、流量监测装备中有很大的优势,应用前景广泛。