无人机集群通信的应用现状及展望
2023-02-18付振江罗俊松
付振江,罗俊松,宁 进,多 滨
(成都理工大学 计算机与网络安全学院,四川 成都 610059)
0 引言
无人机(Unmanned Aerial Vehicle,UAV)因其高机动性在各种域都有巨大的潜力。单UAV的技术比较完备与成熟,具有较高的可控性,但是单UAV传输距离相对较短,经常无法满足复杂的任务需求,可靠性不足。在通信方面,单UAV只需要连接到地面站进行端到端的通信,这种方法虽然设计较为简单,但通信质量过分依赖UAV的轨迹,无法对空中环境进行智能响应与反馈。因此,为了更加广泛地发挥UAV的优势,UAV集群通过协作执行任务可展现更有效、高鲁棒性的能力。近年来,孙海文等[1]介绍了国外UAV蜂群发展状况;贾高伟等[2]介绍了集群的任务分配模型;谷旭平等[3]总结了UAV集群的关键技术;赵林等[4]针对UAV集群协同技术,介绍了在路径规划、态势感知和任务协作方面的应用研究。
上述文献中鲜有考虑UAV集群信息传输中的约束限制,以至于在实际场景中的应用存在局限性,因此研究UAV集群通信可以为各种场景提供可靠和有效的无线通信解决方案。本文从国内外集群在通信中的应用现状研究,总结了各集群通信场景所面临的挑战,分析集群通信架构设计及智能解决方案,针对实际存在的问题提出进一步的研究建议。
1 UAV集群
近年来,UAV技术前所未有的进步使得在通信应用中广泛部署UAV成为可能,由于单UAV在辅助通信时飞行能力、负载和能耗等方面受到限制,已无法适应动态变化的环境,所以多UAV由于覆盖范围较广、飞行更加灵活,受到了大量的关注[5]。多UAV系统通常由地面进行统一调控,例如多UAV灯光秀、编队飞行等,UAV之间彼此独立,导致任务能力较为单一、机间协同水平低,使得多UAV系统向更高阶的集群、自主和智能化方向发展,近些年提出了UAV集群概念[6]。值得注意的是,在大规模UAV集群中,通常将集群划分为小群体,称为UAV簇[7]。表1比较了近年来容易混淆的概念:多UAV,UAV簇和UAV集群。
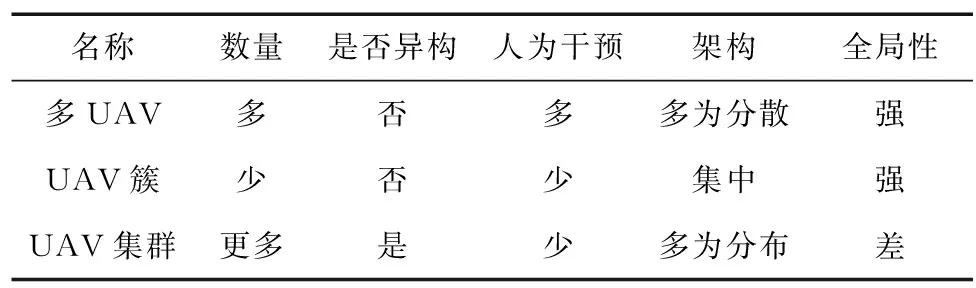
表1 多种UAV系统比较Tab.1 Comparison of various UAV systems
UAV集群通常由大量低成本的小型UAV构成,通过与多UAV系统的对比,UAV集群有以下优点:
① 高能源效率。集群中通常利用体积更小、成本更低的UAV,因此能耗较低。此外,通过轨迹设计和功率分配方案,可将整体功耗降到最小值。
② 方便的可拓展性。在UAV集群系统中,由于集群间通常没有固定的主导节点,所以集群在保持通信过程中出现节点加入或者离开的情况不会影响整体的稳定性,使得集群具有更好的拓展性和适用性。
③ 丰富的通信场景。UAV集群可以理解为多UAV的更高阶形式,近年来的研究拓宽了UAV集群在通信中的应用范围。通过有效的空对地(Air-to-Ground,A2G)通信与空对空(Air-to-Air,A2A)通信,集群系统提高了可实现的负载能力和飞行能力,并且采用不同的传感器和不同的通信策略使其功能更加多样。
UAV集群通信同样面临挑战,与单UAV不同,集群中的UAV节点数量和速度的变化,将导致A2A链路间歇性地建立,需要在飞行过程中考虑集群节点间的通信质量。另外,UAV集群因为数量庞大、覆盖范围更广,更容易受到来自地面或者机间的通信干扰,如何进行干扰消除使UAV集群表现出更高的能力也是需要考虑的问题。虽然UAV集群可以通过设计表现出高能源效率,但是能耗问题依然具有挑战性。
2 UAV集群通信应用场景
UAV集群在公共领域和民用领域有着巨大的潜力,随着集群技术的逐步成熟,大多数应用场景可以从单UAV转向UAV集群,因为UAV集群可以更好地用来提高现有地面无线网络的覆盖范围、容量和整体服务质量(Quality of Service,QoS),所以被认为是5G蜂窝网络之外不可分割的一部分。利用UAV集群可以辅助地面蜂窝网络实现信息的超远距离与安全传输,辅助传感器网络实现信息的快速收集和目标检测。另外,集群也可以作为基站为紧急场景提供应急通信。UAV集群通信应用场景如图1所示。

图1 UAV集群通信应用Fig.1 UAV swarm communication applications
2.1 UAV集群辅助蜂窝网络
随着智能手机、终端和物联网设备等高效移动设备的快速普及,推动了通信需求的不断增长。在城市公共安全服务中,UAV集群可以作为移动中继[8]向远距离节点提供视距(Line of Sight,LoS)链路和额外的容量以实现辅助通信。利用UAV集群可以更好地进行流量卸载,达到低延迟的目的。
UAV集群中继过程中,集群需要连接到蜂窝网络,以形成良好的A2A和A2G通信。文献[9]通过多跳中继实现源节点到目标节点的信息转发,联合优化了中继通信的轨迹与功率分配,实现端到端吞吐量的最大化。文献[10]将无线信道建模为独立的瑞利衰落信道,考虑了集群UAV间的协作与通信干扰,其中一架UAV与地面蜂窝网络相连,实现集群通信与三角编队飞行稳定性优化。文献[11]使用UAV集群作为超小型基站的临时空中回程网络,寻求在空中形成稳定的多跳回程网络,每架UAV可以单独选择连接到回程网关节点的路径,在通信速率和延迟方面得到显著提高。
上述场景均考虑单一基站或者单一用户,以实现远距离的信息传输,而在多蜂窝网络基站场景下,利用UAV集群可以实现流量卸载,提高用户的通信覆盖率。文献[12]提出了一个分析框架,通过分析地面与UAV路径损失推导出信噪比覆盖概率,实现为多用户提供更好的通信质量。文献[13]基于UAV的能耗、缓存及负载,提出了一种新的协同UAV聚类方案,将流量从地面蜂窝基站转移到UAV集群,提高了整体的覆盖性能。文献[14]提出了空中UAV整体通信网络稳定方案,通过设计一个或多个中继UAV的位置,弥补在动态群拓扑下中断的无线链路。通常,中继节点的位置由流量QoS要求和链路条件决定,由于UAV集群的工作高度和强大的空地通信,它通常暴露在多个地面基站中,为地面服务的基站会对集群产生强烈干扰,所以文献[15]提出了UAV集群在延迟限制下实现公共控制信息的可靠接收,通过D2D(Device-to-Device)通信,将控制信息中继到其余UAV。文献[16]考虑了悬停的UAV集群将信息从地面传递到遥远的目的地,并同时由部分UAV产生“友好”的干扰信号来干扰窃听者,实现最大保密率。
使用UAV集群进行中继需要进行轨迹设计,以充分提高整体吞吐量、可靠性和通信范围并且满足用户的移动性需求。此外,在部署UAV集群辅助蜂窝网络系统时,集群的架构和航向角等问题对于最大吞吐量和能源效率都至关重要。
2.2 UAV集群辅助无线传感网络
无线传感网络(Wireless Sensor Network,WSN)具有广泛的应用前景,包括城市的监控和救援、自然灾害的预防等。UAV集群因其高机动性、分布广,LoS主导的链路可作为WSN中的数据采集器和传播者。
目标检测是UAV集群辅助WSN中常见的应用之一。UAV集群可以在飞行过程中感知目标信号强度,并通过互相通信以避开重复搜索区域,实现快速侦察检测。文献[17]研究了集群UAV在未知环境下的目标搜索问题,通过考虑UAV的运动特性结合多阶段搜索机制和调度控制策略,提高了目标的搜索率。文献[18]探讨了UAV集群群体特征间的关系,通过将UAV划分为不同的角色以在重大自然灾害下协同收集态势感知数据,实现广泛的面积覆盖和最快速的救援响应。但是上述研究均未考虑UAV集群的能耗问题,更关注于UAV集群的路径规划,通信机制仅通过UAV之间距离实现。文献[19]使用异构的UAV集群进行大规模区域的自动检查,并将检查数据发给地面基础设施,提出一个能耗模型联合设计UAV飞行、悬停、能耗和数据传输,以最小化UAV集群的总体能量消耗。
目标检测应用需要实现快速访问目标点,而在灾害等情况下,利用UAV集群搭载传感器收集地面信息,实现尽可能的覆盖也是主要应用之一。文献[7]研究了分层的大规模UAV集群场景,下层UAV根据彼此通信链路选取簇头,实现地面监视和数据收集,并且指定一架渡轮UAV来收集收据。文献[20]考虑数据收集过程中恶意干扰下的集群通信,集群在飞行过程中可以根据链路质量进行聚类并且通过优化UAV的轨迹以最大限度提高簇头的和速率。在数据收集过程中,地面通常被建模为平坦地面,不具备很好的实用性,文献[21]利用分层UAV集群研究三维不规则地形覆盖问题,提出了一种将三维地形表面投影成多个加权二维斑块的几何方法,并设计了一种分层式的覆盖轨迹算法。在文献[22]中,UAV集群配备了传感器,将集群当作粒子更新位置和速度用于UAV集群的轨迹设计,并将地面目标进行聚类,以应对不同的战术需求,实现精准检测及快速覆盖。
针对UAV集群辅助WSN问题,仍有其他挑战有待解决。例如,UAV集群的最佳速度、感知信号强度的阈值以及传感器干扰等。为了应对以上挑战,有必要设计UAV的飞行轨迹,以在集群覆盖范围和飞行时间中达到一种权衡。
2.3 UAV集群应急通信
由于不受高度和昂贵的基础设施的限制,UAV集群可以轻松改变位置,并在紧急情况下为地面用户提供按需通信,尤其是在地面设施受损的情况下,如2021年因暴雨灾害而采用的翼龙UAV应急通信系统[23]。集群基站通信系统不仅有助于改善连接,而且可以在最短时间内持续移动到给定区域进行全覆盖,具有抗毁性,可极大提高救援效率[24]。文献[25]考虑了地面用户设备使用关联策略,选择其中一个UAV作为服务基站,其余的为干扰基站,通过计算UAV和用户间的信噪比,比较集群的通信覆盖能力。文献[26]考虑灾害场景,UAV集群作为应急通信,配置大规模的通信网络进行覆盖,提出了基于群智能的UAV通信网络定位和聚类方案。
与现有的单UAV解决方案相比,部署UAV集群作为基站实现应急通信可以在范围和用户体验方面提供更好的效能。有待解决的挑战是在三维空间中找到最佳的位置和移动性,以获得最大的覆盖范围,避免机间和地面干扰以保证用户的体验质量。
3 UAV集群架构设计与优化
虽然UAV集群比单UAV机制有一些显著优势,但是在集群通信系统中仍存在诸多挑战:一方面,由于高度动态的集群环境和灵活的飞行姿态,如何在飞行过程中使集群系统表现出更高的通用性是需要解决的问题;另一方面,在相对较长的距离,相关的集群与地面基站通信中,需要考虑UAV集群的能耗及功率分配等。本节从通信架构和轨迹优化算法方向解决上述通信场景问题。
3.1 集群架构
UAV集群体系架构是将UAV集群的特性,结合UAV集群通信场景按照一定的逻辑关系将UAV有组织地结合起来,使之成为一个具有协同交互的群体,所以UAV集群体系架构设计通常是解决集群通信问题的基础和前提。近年来,针对UAV集群通信场景主要有2种架构:集中式和分布式架构[27]。集中式架构是指每架UAV都与中心节点通信,并且由中心节点进行UAV的统一规划,搭建相对简单,集群之间不需要过多信息传输,但是对于中心节点而言计算量大,中心节点出现故障时整个集群将瘫痪,所以只适用于小规模集群[28];分布式架构中没有控制中心,UAV间可以互相通信,集群具有灵活性和强鲁棒性,可以提升任务的执行能力,并具有很好的拓展性,适用于大规模UAV集群,是主流研究方向[29]。本节重点介绍近年来UAV集群中的分布式架构设计。集中式与分布式架构的区别如表2所示。
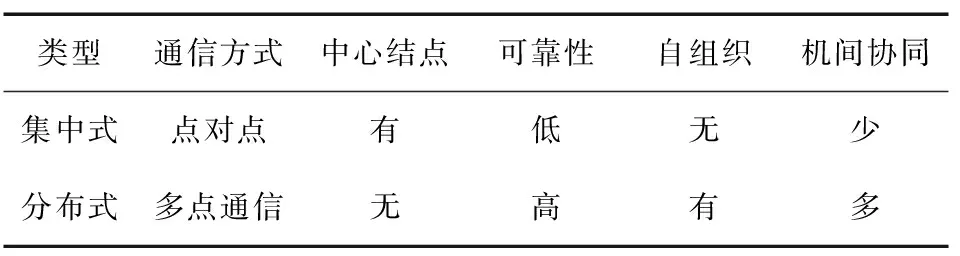
表2 集中式与分布式架构区别Tab.2 Differences between centralized and distributed architectures
对于分布式架构设计,通常有2种方式:一种为大、小型UAV协同,即领导者-跟随者(Leader-Follower)模式,其中存在显式的领导者[30-31],数据由下层跟随者进行反馈,并由领导者进行全局收敛统一调控,这种架构多用于UAV集群辅助WSN场景;另一种UAV集群架构通过在集群中挑选簇头,使集群分簇,簇的数量和簇头可以根据条件改变,更适用于大规模集群,并且具有很高的自适应性[7,20]。文献[32]综合研究了UAV集群的分簇算法,簇头可以根据位置、链路状态、距离等条件及任务类型灵活选取并对集群中的分簇和联盟操作进行了比较。集中式架构和分布式架构如图2所示。

图2 UAV集群架构Fig.2 UAV swarm architecture
3.2 架构与航迹联合设计算法
对于UAV集群通信,在实现架构的同时,需要进一步考虑与单UAV通信类似的性能指标,比如链路信道干扰比(Signal to Interference plus Noise Ratio,SINR)、中断/覆盖率、通信吞吐量、延迟和能源效率[33]。针对上述性能指标,对UAV集群通信的架构和轨迹设计算法进行比较。近几年,UAV集群关于架构与轨迹协同设计的解决算法可分为3种:经典算法、智能体算法和人工智能算法。
3.2.1 经典算法
经典算法包括人工势场法、图论、凸优化方法和随机几何方法等。在经典算法中,人工势场法的应用最为广泛[34],其基本思想是基于物理中的“势场”概念实现的,通过智能体在环境中目标位置与障碍物的距离计算出智能体所受到的合力,进而改变UAV集群的速度与方向,实现UAV集群的轨迹优化。实际应用中,难以结合UAV的自身特性调整引力函数与斥力函数,并且容易陷入局部最优。
图论法的原理是对整个环境进行建模,再进行路径搜索,比较直观,易求出最短路径,适用于全局和连续区域内的路径规划,包括Dijkstra和A*算法等。Dijkstra算法是求解最短路径的经典算法,在UAV轨迹优化过程中展现了良好的效果,实现较为简单,但是由于其在高维空间中搜索时间过长,并对内存有严格要求,所以该算法常用于二维的静态轨迹优化问题。A*算法的应用十分广泛,在Dijkstra算法基础上加入了启发式搜索思想,通过搜索当前位置周围最小代价的航迹点逐步找到目标位置,最后逆向回溯节点的父节点得到最优航迹[33]。
在UAV集群通信中,A2G和A2A的连接通常建模为LoS信道,这一假设将一些问题转化为凸优化问题,进而考虑UAV的轨迹优化,最大化支持用户的数量或者覆盖范围最大化。文献[20]采用凸优化方法,通过将UAV轨迹和簇头选取规则联合设计,实现全局最优。文献[35]考虑了UAV的转弯和爬坡角,通过联合优化使终端吞吐量最大化,将非凸问题进行分解以获得次优解。
经典算法机制较为简单,通常用来找寻单UAV的最优路径或位置,但是传统算法对环境依赖度高、需要较强的UAV感知能力,容易陷入局部最优,不适用于高维空间或者UAV数量多的场景。受到干扰情况下,UAV集群很难表现出良好的能力。
3.2.2 群体智能算法
自然界中,为了弥补个体的不足,许多生物种群通过个体间的相互交流与合作可以表现出更好的能力。近年来,在轨迹设计中常运用生物群体智能行为算法,最常见的是粒子群(Particle Swarm Optimization,PSO)算法。在PSO算法中,一群粒子在一个有限空间内运动,根据自己和群体中其他粒子共享的信息更新自身的速度和位置以找到目标函数的全局最优。文献[22]采用了PSO,每个粒子在通信过程中都获得自身的位置和速度,以保持其最高适应度的轨迹,并对PSO算法进行改进。然而,PSO算法需要经过长时间的探索来等待信息素的有效反馈,收敛速度较慢。文献[17]提出了基于种子优化(Bean Optimization)算法的搜索协同方法,增加了自由空间搜索机制,相对于PSO算法可实现更快收敛,更适用于集群辅助WSN。对于一些新兴算法,如狼群(Wolf Colony Algorithm,WCA)算法[36]、人工蜂群(Artificial Bee Colony,ABC)算法[37],可以根据局部交互和感知的简单规则在集群中挑选出更有能力的领导者,将UAV集群进行聚类,实现分布式架构,并通过轨迹优化进行有效、节能的通信。常见的启发式算法对比如表3所示。
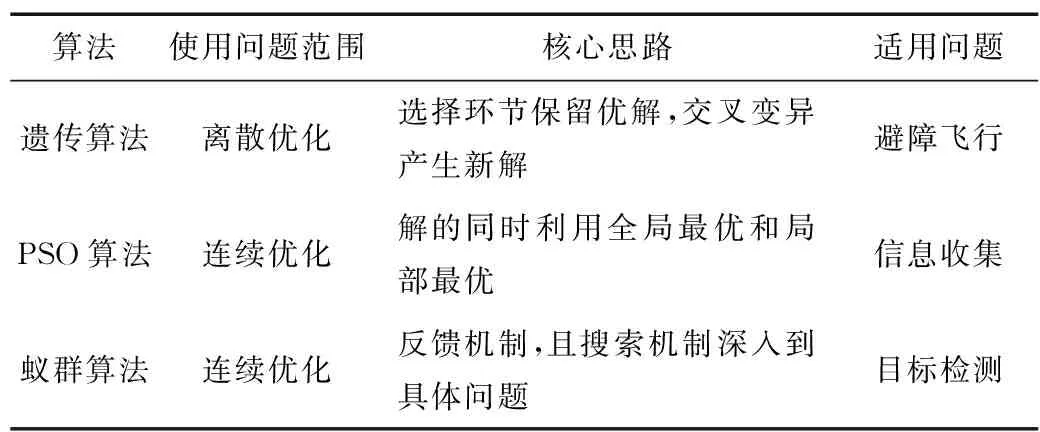
表3 启发式算法对比Tab.3 Comparison of heuristic algorithms
3.2.3 人工智能算法
为了简单,在UAV集群辅助地面通信时,地面用户被认为是静止的,在轨迹设计时自然会倾向于用户的通信需求[12],无法应对实际中随机移动的多用户,并且在通信过程中和用户连接相关的历史信息分布在多架UAV上。由于每个用户的数据集规模大,加上UAV能量有限及隐私问题,UAV之间无法共享所有信息,无法适用于实际应用。
人工智能技术和机器学习的发展,有望在优化整体吞吐量、资源分配和调度、提高用户和UAV集群的运动预测以及实现安全通信等各个方面发挥作用。文献[38]利用Q-learning算法,驱动UAV与环境信息不断交互使得集群轨迹可以在更好满足地面用户的移动性需求的同时,达到总吞吐量最大。但是随着UAV和用户数量的增加,较大的动作空间及状态使得Q-learning算法全局收敛速度慢。文献[14]为了处理集群间实时变化的通信链路,设计了深度Q学习(Deep Q-learing,DQN)模型来指导UAV中继节点的最优定位,以实现通信吞吐量最优,文献[21]将深度Q学习用于解决领导者UAV覆盖区域选择和通信质量问题,并通过对跟随者轨迹的设计,使得地面覆盖时间最短。
传统的机器学习需要将数据汇聚到中心后才可以进行模型训练,可能会导致高延迟和显著的带宽消耗。而联邦学习(Federated-Learing,FL)作为一种分布式学习算法可以有效解决此问题,其核心思想是通过在多个拥有本地数据的数据源之间进行模型训练,实现数据共享,共同建模。在文献[30]中由跟随者UAV训练其局部模型,并由上层领导者UAV进行全局收敛,联合优化上行和下行传输的UAV,以实现最小延迟。文献[31]考虑了UAV集群的能耗限制,实现了UAV集群的位置部署,UAV领导者和群成员之间采用FL,通过训练UAV的数量和地面通信质量以改进局部学习模型,达到全局收敛。
人工智能算法需要进行UAV数量、通信质量和移动性的模型训练,所以常用于不同尺寸UAV的分布式架构,其中常规定大型UAV为更有计算能力或者负载更高的领导者进行全局收敛,更适用于UAV集群辅助WSN场景。人工智能算法对比如表4所示。
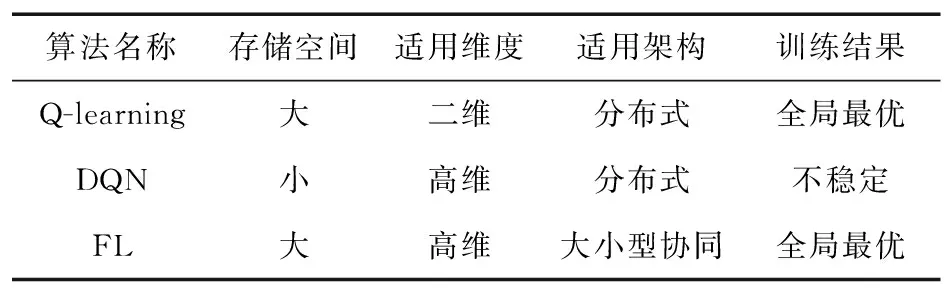
表4 人工智能算法对比Tab.4 Comparison of artificial intelligence algorithms
4 未来展望
UAV集群已经成为无线通信研究的焦点,可以应对各种场景遇到的广泛挑战,如轨迹设计、干扰管理及资源分配等。结合最新的研究提出了UAV集群未来可能的发展方向:
① 智能反射面(Intelligent Reflecting Surface,IRS)辅助集群通信。IRS是近年来提出用来补充长距离通信路径损失的技术,可以通过被动反射用户接收到的信号在UAV和地面用户间形成虚拟的LoS连接。在UAV集群中可以考虑搭载IRS的UAV,通过联合设计轨迹、IRS相位等,提供潜在的SINR增强,进一步提高UAV集群通信的性能。
② 集群任务分配。UAV集群通信固然可以解决一些实际问题,然而现有研究通常为多架高度协同的UAV被指派同一个任务。在实际生活中,如何根据任务需求或者高度动态的环境,形成UAV集群是一个重要的开放问题。尤其是作战环境下,UAV集群需要同时完成侦察、辅助通信和数据回传等任务。所以在UAV集群通信中考虑任务分配或者进一步协作具有实际意义。
③ 移动边缘计算和智能任务卸载。UAV集群技术有望在未来通信中发挥重大作用,然而在通信过程中,尤其在数据收集、目标检测等场景下,将面临数据量激增的问题。所以需要进一步研究移动边缘计算和智能任务卸载,UAV可在自身进行计算或者通过计算卸载将服务下放到相邻的UAV边缘节点,以获得高速率、低时延和及时响应的服务。
5 结束语
近年来,随着人工智能等技术的高速发展,UAV集群技术应对通信问题迎来了新的发展机遇。在通信需求激增下,采用UAV集群通信可提高通信的整体吞吐量和速率,以有效应对各种实际场景和工作。在未来工作中,要重视3个方面的工作:一是加强智能算法的研发,使UAV集群的架构和轨迹能够满足更多实际场景;二是UAV的异构创新,使UAV能够在不同负载、功能和任务能力下进行协作;三是算力水平提升,融合云计算、边缘计算等多技术,形成新的技术体系,减少因计算带来的能耗。总之,加大对UAV集群通信技术的研究和应用规模,可以激发UAV在通信中的潜力,促进UAV通信应用的蓬勃发展。