一种长航时太阳能无人机能量管理策略
2023-02-18苏圣昊
王 浩,苏圣昊
(中国飞行试验研究院,西安 710089)
长航时太阳能无人机供配电系统由2 种不同的电源和3 种不同的负载组成,不同电源之间的动态特性、能量密度和功率密度等参数均不同,不同的负载动态响应也不同。如何分配不同种类的电源和同种电源组间瞬时功率和平均功率匹配不同负载的突变,使系统有较高的效率、稳定性和经济性,以及延长电源的使用寿命,是无人机供配电系统的主要目标。
Shiau 等[1]针对小型无人机的太阳能管理系统进行了设计,该架构适用于低功率场景的无人机,不适用于高空长航时太阳能无人机这样结构的高功率系统。Lawhorn 等[2]针对分布式推进的混合动力太阳能飞机架构进行研究,包括太阳能电池、蓄电池、分布式推进电机和电源变换系统。提出了一种各个模块的控制方案。这种架构只考虑了推进系统为分布式分布,光伏和蓄电池都是集中式分布。
Lee等[3]针对使用太阳能电池,燃料电池和电池组作为电源的200 W级、低速、长寿命太阳能无人机进行了一种基于规则的主动电源管理方法的研究。Zhang等[4]针对由太阳能和氢能构成的混合动力机型,研究了混合能源动力无人机重量和能量之间相关联的仿真模型,并结合无人机的实际飞行剖面进行优化管理。Wang等[5]使用最优控制原理优化全电动飞机在巡航阶段的效率,该研究将飞机推进系统和电池电量耦合,在起点和终点相同的情况下,以电池电量最小作为优化目标,对飞机进行航迹规划。Han等[6]针对光伏/氢/电池混合直流微电网,提出了一种分层能源管理策略,包括本地控制层和系统控制层。在本地控制层中,包括最大功率点跟踪控制和下垂控制。系统控制层采用了等效消耗最小策略,实现了光伏、氢燃料电池和电池之间的功率分配。Keerthisinghe等[7]针对地面家庭微网,提出了一种评估住宅光伏发电和需求模型的方法,该方法可以根据历史数据采用深度学习技术预测光伏发电功率和负载需求。Manickavasagam等[8]针对具有太阳能电池、风车、燃料电池和柴油发电机船舶系统提出了一种基于模糊逻辑控制的能量管理系统。
综上所述,在长航时太阳能无人机分布式架构设计、分布式控制、电推进负载功率需求及能量管理相结合的研究较少,有待于对这类研究提出系统性的解决方案,满足未来长航时太阳能无人机的能量需求。本论文对长航时太阳能无人机进行研究。设计了由4 套供电单元构成的分布式供电系统架构及3 种不同负载的配电系统架构,随后对长航时太阳能无人机供配电系统建模,结合无人机设定的飞行工况,采用了一种基于分层控制架构的能量管理策略,并进行仿真验证。
1 长航时太阳能无人机供配电系统架构设计
长航时太阳能无人机供配电系统的架构分为供电系统和配电系统。供电系统分为4 个分布式的供电单元,分别对应长航时太阳能无人机的左前翼、左后翼、右前翼和右后翼4 个供电单元。每个供电单元都是一个具备自调节能力的智能体,每个智能体分别由太阳能电池板、MPPT 控制器、电池组和电池管理控制器4 个模块组成。配电系统分为任务载荷、航空电子设备和电推进负载。航空电子设备在白天和夜晚的需求功率大致相同,载荷所需功率在白天和夜晚不同,飞行剖面动力功率会随飞行剖面而变化。在长航时太阳能无人机能够完成每天任务的条件下,为了延长无人机的滞空时间、稳定性、部件的寿命及系统可靠性,必须设计一套与长航时太阳能无人机供配电系统相匹配的能量管理策略。由于供电系统具有多个供电单元,每个供电单元的输出功率都必须受到严格的控制,防止某一供电单元输出功率过大,影响部件寿命。辐射强度在一天之内变化很大,这就导致了太阳能电池在一天之内的输出功率变化也很大。当太阳能电池输出功率高于负载功率时,需要电池组存储剩余的能量;当太阳能电池输出功率不足时,需要电池释放能量。怎样合理的利用和存储太阳能电池产生的能量也是能量管理策略需要考虑的问题。基于此,本文采用了基于分层控制架构的能量管理策略进行研究,分层控制架构可以划分为顶层控制和底层控制这2个层次,控制构架图如图1 所示。
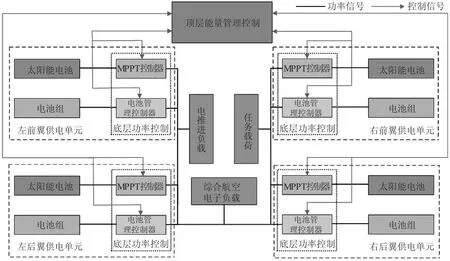
图1 长航时太阳能无人机分层控制架构图
顶层控制为系统级控制,主要作用是对长航时太阳能无人机供配电系统进行能量管理,确定各供电单元变换器工作方式,保证整个无人机供配电系统的能量平衡,为底层控制器提供长航时太阳能无人供配电系统的工作模式,提高无人机供配电系统的可靠性和稳定性。
底层控制为设备级控制,主要作用是对每个供电单元进行功率控制,在各个供电单元内部完成控制,本地控制器主要作用是维持母线电压。对于电池管理控制器,底层控制为直流母线电压控制和充放电控制;对于MPPT 控制器,底层控制作用是维持母线电压或使太阳能电池处于MPPT 模式。
2 顶层控制
顶层控制需要对长航时太阳能无人机供配电系统进行能量管理,能量管理的目标为延长无人机的滞空时间,延长部件的寿命,增强系统的稳定性及提高系统的可靠性。合理地利用和存储太阳能电池产生的能量是延长无人机滞空时间的主要方法,根据长航时太阳能无人机执行一天飞行任务电池剩余电量可以判断无人机的滞空时间。电池组的寿命也会影响长航时太阳能无人机滞空的时间,良好的充放电策略可以延长电池的使用寿命。系统各状态之间的平滑切换可以保证系统的稳定性。合理分配和控制各供电单元的输出功率可以提高系统的稳定性。
本文使用了一套基于6 状态的规则式能量管理策略,工作区间的划分和区间内的执行规则如图2 所示,其中输入参数为太阳能电池组的输出功率PPV、负载的功率Pload和电池组的电量SOC。输出参数为太阳能电池和电池组的状态,太阳能电池的状态为恒压模式PVvoltage、最大功率点跟踪模式PVMPPT和断开模式PVoff,电池组状态为恒流充电模式Baticharge、恒压恒功率比充电模式Batvcharge、恒压恒功率比放电模式Batdischarge和断开模式Batoff。
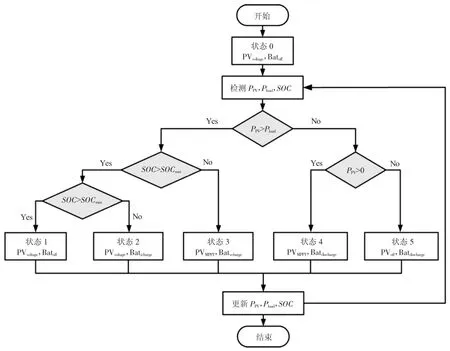
图2 规则策略流程图
各状态说明如下。
状态0:起始状态,电池组处于断开状态,负载处于断开状态,太阳能电池处于恒压模式,母线电压由MPPT 控制器维持在270 V。
状态1:电池组处于断开状态,负载随飞行剖面变化,太阳能电池处于恒压模式为负载提供能量,母线电压由MPPT 控制器维持在270 V。
状态2:电池组处于恒流充电状态,负载随飞行剖面变化,太阳能电池处于恒压模式,母线电压由MPPT控制器维持在270 V。
状态3:电池组处于恒压恒功率比充电状态,负载随飞行剖面变化,太阳能电池处于最大功率跟踪模式,母线电压由电池管理控制器维持在270 V。
状态4:电池组处于恒压恒功率比放电状态,负载随飞行剖面变化,太阳能电池处于最大功率跟踪模式,母线电压由电池管理控制器维持在270 V。
状态5:此状态为夜晚状态,电池组处于恒压恒功率比放电状态,负载随飞行剖面变化,太阳能电池处于断开模式,太阳能电池停止发电,母线电压由电池管理控制器维持在270 V。
3 底层控制
3.1 太阳能电池控制
太阳能电池将工作在断开模式、恒压模式和最大功率点跟踪模式。当系统处于状态5 时,无人机在夜间巡航,太阳能电池处于断开模式。当系统处于状态1 和状态2 时,太阳能电池输出的最大功率大于负载功率和充电功率的总和,太阳能电池处于恒压模式,母线电压由MPPT 控制器维持在270 V。当系统处于状态3 和状态4 时,太阳能电池处于最大功率点跟踪模式,母线电压由电池管理控制器维持在270 V。
本文将使用模糊逻辑在太阳能电池最大功率点追踪的过程中,实时修改系统的仿真步长。典型模糊推理系统的结构如图3 所示,将输入参数模糊化后通过模糊系统中进行计算,将计算结果去模糊化后作为输出参数。模糊逻辑控制器的按照“模糊化—建立推理规则—确定推理方法—去模糊化”的顺序进行设计[9]。
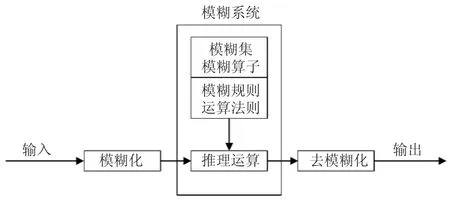
图3 模糊逻辑系统推理结构
3.2 电池组控制
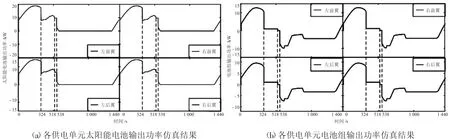
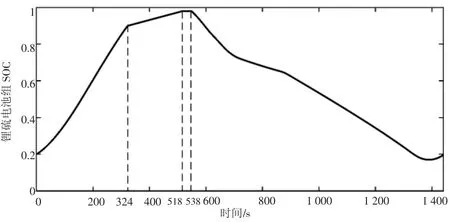
电池组将工作在断开模式、恒流充电模式、恒压恒功率比充电模式和恒压恒功率比放电模式。当系统处于状态1 时,PPV>Pload,电池SOC 大于98%,电池组断开。当系统处于状态2 时,PPV 长航时太阳能无人机供电系统的电池管理控制器根据主、从的功能分为2 种。主控制器的功能是稳定母线电压,不会对电池的输出功率进行控制;从控制器的功能是根据主控制器的输出功率控制与其对应的电池的输出功率,不会对母线电压进行控制。因为主控制器的功能是维持母线电压,输出功率较大的供电单元对母线电压的控制具有主导作用。因此,选择左前翼电池管理控制器作为无人机整个供电系统的主控制器,左后翼、右前翼和右后翼电池管理控制器作为无人机供电系统的从控制器。 在Matlab/Simulink 上搭建整个长航时太阳能无人机供配电系统的主电路模型,长航时太阳能无人机供电系统由左前翼、左后翼、右前翼和右后翼4 个供电单元组成,每个供电单元分为太阳能电池阵、MPPT 控制器、电池和电池管理控制器。负载分为固定负载和电推进负载,固定负载由综合航空电子设备和任务载荷单元组成。 将长航时太阳能无人机进行一天的飞行任务缩比到1 440 s(24 min),任务的起始时间早上八点,此时电池的SOC 设置为20%,整个任务持续到第二天的早上八点截至。顶层采用基于规则的能量管理策略,底层控制采用基于模糊的变步长扰动观测法和主从控制,长航时太阳能无人机供配电系统飞行1 440 s 的仿真结果如图4、图5 所示。 图4 各供电单元太阳能电池和电池组输出功率仿真结果 图5 电池SOC 仿真结果 在系统的运行过程中,母线电压始终稳定在270 V,保证了供配电系统的稳定性;4 个供电单元的功率输出比保持在4∶3∶4∶3,保证了供配电系统的可靠性;电池组严格按照充放电策略运行,电池组的SOC 大于10%,没有进入深度放电,延长了系统部件的寿命;系统运行结束时,电池组SOC 维持在20%与系统设置的初始值相同,合理利用和存储了太阳能电池产生的能量,延长了无人机的滞空时间。 本文采用了一种基于分层控制架构的能量管理策略,分为顶层控制和底层控制。顶层控制实现无人机供配电系统的能量调度、多种运行模式间的平滑切换的功能,设计了一种基于规则的能量管理策略。底层控制维持母线电压,包括太阳能电池的控制和电池组控制。太阳能电池最大功率点跟踪算法采用了基于模糊控制的扰动观察法。电池组充放电控制采用了主从控制。结合长航时太阳能无人机的飞行工况,对系统进行了数字仿真验证,证明了能量管理策略的正确性和有效性。4 仿真设计
5 结论
