非连续阻抗粘接结构脱粘缺陷的稀布阵列超声成像*
2023-02-18张辉朱文发范国鹏张海燕
张辉 朱文发† 范国鹏 张海燕
1) (上海工程技术大学城市轨道交通学院,上海 201620)
2) (上海大学通信与信息工程学院,上海 200444)
无砟轨道是典型的非连续阻抗粘接结构,在重载、环境恶化等因素的影响下,脱粘现象频发,严重危及列车运行安全.本文提出一种高精度阵列超声快速成像方法,建立考虑层间声速差异的非连续阻抗粘接结构声速理论模型,采用射线追踪方法获取声波在介质中的传播路径和时间.基于实数编码设计高自由度稀布阵列,构建稀布阵列合成孔径聚焦技术(synthetic aperture focusing technique,SAFT)成像,提高检测效率.在无砟轨道结构上的实验结果表明: 射线追踪方法能够准确计算超声波的传播路径和传播时间,提高检测精度;优化设计的稀布阵列方向图主瓣宽度窄,旁瓣增益低,可提高检测效率和声场指向性;脱粘缺陷成像误差在±5%以内时,稀布阵列SAFT 成像方法效率提高了30.9%,可为该类缺陷检测提供理论支撑.
1 引言
多层复合粘接结构能够均匀化应力分布,避免应力集中问题,广泛应用于航空航天、汽车、轨道交通等工业领域.如高铁基础结构中大量使用的无砟轨道结构就是一种由轨道板、砂浆层、底座板和基床组成的典型非连续阻抗多层混凝土复合粘接结构,各层间的材料、厚度、密度均不相同.作为列车运行的主要承载结构,在高速列车不断冲击以及外部环境的长期作用下,脱粘现象频发[1].脱粘缺陷降低了无砟轨道承载能力,危及列车运行安全,严重时将导致列车倾覆等重大安全事故[2−4].目前,针对脱粘缺陷常用的现代无损检测方法主要有冲击回波法、红外热成像法、探地雷达法、声发射法、超声波等.冲击回波法[5,6]只能定性分析被检测物体的内部是否存在缺陷,难以定量分析.红外热成像法[7,8]通过被检试样表面红外辐射性能的改变实现检测,难以实现多层复合粘接结构脱粘缺陷的检测.探地雷达法[9,10]的电磁波在遇到钢筋时无法继续传播,该方法不适用于分布有大量钢筋的无砟轨道脱粘缺陷检测.声发射法[11]受到环境噪声影响较大,检测准确度较低,并且该方法不可逆,信号无法重复获得.
超声波具有传播能量大,指向性好等优势,在对钢筋混凝土结构检测时,能够穿过内部钢筋不受其影响,越来越多的学者使用超声波检测混凝土结构内部损伤.尤其是利用线性周期超声阵列通过全矩阵捕获方式获取检测信号,再对全矩阵数据进行后处理和虚拟聚焦,就能够实现缺陷成像,精确地可视化分析缺陷的位置和形状,如全聚焦成像方法.然而,全聚焦成像方法建立在单一均匀介质假设基础上的超声成像理论,难以直接运用于非连续阻抗结构中脱粘缺陷的成像.无砟轨道结构中不同层之间声阻抗不同,超声波在每一层传播的速度都不同[12].超声波在无砟轨道结构中传播路径更加复杂,传播路径和传播时间难以通过常规的计算方法获得.射线追踪可以解决声波在介质中不同层之间的传播时延问题,但常规的射线轨迹追踪法[13−15]是基于反向映射原理,在计算声波传播时间的过程中均存在反复迭代计算,成像效率低.
此外,利用全矩阵数据进行超声成像计算耗时多,而无砟轨道结构的检修时间一般在凌晨0—4 时进行,检测时间短暂.为了提高超声成像效率,很多学者在满足时效性要求方面进行了研究.一方面是通过提高计算硬件的性能,比如,图形处理器(graphics processing unit,GPU)加速技术[16]以及多场可编程门阵列(multi-field-programmable gate array,multi-FPGA)并行计算[17]等.然而,利用高性能计算硬件在提高计算效率的同时增加了检测系统的成本,难以在轨道交通运维市场进行大面积推广与工程应用.另一方面,采用阵元稀疏算法,减少阵元使用数量,构建稀疏矩阵数据,在保证成像质量的条件下,提高计算效率,保证成像的实时性[18].李明飞等[19]对比研究了遗传算法和粒子群算法优化光学相控阵天线配置,分别实现了不同种群数量遗传算法和粒子群算法迭代优化.Bray 等[20]利用遗传算法进行线性阵列稀疏设计,获得了较好的阵列声学特性.Peng 等[21]使用稀疏的方法对单层结构进行检测,同时增大阵列孔径尺寸,提高了成像效率,由于阵列孔径尺寸发生变化,检测时声场也会随之发生变化,导致成像的质量不高.以上各种方法在解决超声阵列稀疏优化问题时,均采用二进制编码方式,阵元位置一般是周期性等间距排列,阵元自由度低,声场指向性和声束聚焦性能差,难以获得最佳的阵列声学性能.
因此,针对非连续阻抗粘接因声阻抗差异大,无法精确计算声波在各层之间的传播时间,以及全矩阵数据进行超声成像计算耗时,难以实时成像、检测效率低的问题,本文采用射线追踪方法,利用直线扫描转换技术Bresenham 算法,Snell 定律和Fermat 原理,建立射线追踪的映射过程,准确计算超声波在介质中不同层之间的传播时间,提高检测精度.构建基于实数编码的稀布阵列合成孔径聚焦技术(synthetic aperture focusing technique,SAFT)成像方法,以阵列方向图的最小化峰值旁瓣电平为目标,采用改进的遗传算法优化阵元位置,阵元位置呈非周期性排列,阵元自由度显著提高,增强了声场指向性和声束聚焦性能,提高了检测效率.
2 非连续阻抗粘接结构的超声SAFT成像方法
2.1 多层复合结构的声速模型
在多层结构中,当声波以一定的入射角到达多层固体介质分层界面时,会发生反射、折射等现象,多层介质每层的声场都可能是多个单波声场的叠加,层内波的类别与声波入射角度有关.多层介质中声波的传播路径如图1 所示.多层结构中存在多个水平层,编号由上向下依次为1,2,···,n.α,θ分别表示声波的入射角和折射角,v表示声波在各层的波速.Z轴为垂直方向,X轴为层状平行方向.

图1 多层结构中声波的传播Fig.1.Sound wave propagation in multilayer structure.
多层结构中,在不考虑Snell 定理的情况下,超声波从S点可以通过多条传播路径传播至多层结构中的第二层中的缺陷点F点,如图2 所示.像素点在第二层中时,超声波在多层结构内的传播路径为超声波从激励点S以α角入射到第一层中,入射波在第一层中传播至第一层与第二层界面处的R点.超声波在R点处发生角度为θ的折射后传播至第二层中的缺陷F点.已知入射点S和F点坐标时,Snell 定律为

图2 声波在多层结构内的传播路径Fig.2.Sound wave propagation path in the multi-layer structure.

其中,v1和v2分别表示第一层和第二层中超声波的波速.根据Snell 定律,结合图3 可得

图3 声波在多层结构中的传播示意图 (a) F 在第二层内;(b) F 在第n 层内Fig.3.Schematic diagram of sound wave propagation in multi-layer structure: (a) F is in the second layer;(b) F is in the nth layer.

联立(1)式,得出声波在多层结构内的传播声时T F:这里,v1表示超声波折射前的波速,v2表示超声波折射后的波速,(xS,zS) 表示入射点S的坐标,(xR,zR)表示折射点R的坐标,(x,z) 表示F点坐标.
(3)式是关于x R的四次方程,当像素点F在第二层内时,求解(3)式即可得到声波从第一层传播至第二层时折射点位置坐标.当像素点F在第n层内时,由A点传播至第n层要穿过n– 1 个界面,如图3(b)所示,发生n– 1 次折射,此时需要求解关于折射点坐标的多元四次方程,才能计算出像素点在第n层时的折射点坐标.求解多层结构声速解析计算模型可准确获得超声波在多层结构中的传播时间.由于无砟轨道结构中轨道板、砂浆层和底座板的声阻抗差异较大,因此可以将其等效为复合弹性板结构,在该多层结构上使用超声线性阵列的横波探头建立激发和接收的声传播模型.将砂浆层与底座板之间的脱粘缺陷视为局部脱空,超声阵列的理论模型如图4 所示.由于超声波在界面处会发生折射,超声波在无砟轨道结构内的传播路径不再是两点之间的直线距离.因此,准确计算出超声波在无砟轨道中传播时间的关键在于如何找到真正的超声波折射路径.

图4 无砟轨道脱粘缺陷模型Fig.4.Debonding defect model of ballastless track.
2.2 多层结构射线追踪SAFT 成像
根据Snell 定律可知,超声波在从一种介质传播到另一种介质时,在两层不同介质的界面处势必产生折射,超声波在各层内的折射线段就组成了其实际传播路径.脱粘缺陷精确表征的难点在于精确求得声波的传播时延,即准确求得声波的传播路径,而射线追踪技术正是解决此问题的有效方法之一.基于Snell 定律和Fermat 原理的射线追踪方法的原理是通过迭代运算寻找超声波传播耗时最短的路径.该方法在路径选择时,需要计算全部目标像素点所对应的所有可能路径之后再进行迭代选择.
无砟轨道是三层结构,需要将目标像素点处在第一层(轨道板)、第二层(砂浆层)和第三层(底座板)进行分块计算,如图5 所示.

图5 目标像素点示意图Fig.5.Schematic diagram of target pixels diagram.
目标像素点F(x,z)在轨道板内,此时不存在折射现象,只需利用轨道板中的声波速度即可求得超声波的传播时间T(x,z) :

目标像素点F(x,z)在砂浆层内,超声波从激励点S(xS,zS)传播至轨道板与砂浆层界面发生折射后,传播至目标像素点F(x,z).将轨道板与砂浆层的界面划分成M个折射点 (R1,R2,···Ri,···RM) .目标像素点F(x,z)在砂浆层时,总的传播时间可以由超声波在折射线上的传播时间相加求得.根据Fermat原理,最短的传播时间为超声波由点S(xS,zS)传播至F(x,z)的时间,即

式中,TSR和T RF分别表示超声波从发射点S(xS,zS)传播至轨道板-砂浆层界面的传播时间以及超声波在轨道板-砂浆层界面折射后传播至砂浆层中目标像素点F(x,z)的传播时间.
目标像素点F(x,z)在底座板内,超声波从发射点S(xS,zS)传播至轨道板与砂浆层界面时发生折射后,传播至砂浆层中,最后在砂浆层与底座板界面处发生折射后进入底座板中,在这个过程中,超声波发生了两次折射,传播路径分为三段.轨道板-砂浆层界面可以离散成M个折射点,砂浆层与底座板界面可以离散成P个折射点(K1, K2,···Kj,··· KP).将超声波在三段路径上的时间相加,即可得到目标像素点F(x,z)在底座板的情况下超声波的传播时间.超声波由发射点至目标像素点的传播时间可以根据Fermat 原理求得:

无砟轨道层间声速差异较大,采用恒定声速对脱粘缺陷进行检测的误差大,通过射线追踪能有效求得声波的传播路径和声波的传播时间,检测精度得到明显提升.但是,在成像时每个像素点都需要单独求解,射线追踪计算过程复杂、运算时长,难以实现实时成像,检测效率低.为了提高检测效率,采用智能优化算法,减少阵元使用数量,在保证成像质量的条件下,提高计算效率,保证成像的实时性.
3 稀布阵列优化方法
使用超声阵列进行检测时,采用线性阵元周期等间距排列且传统的智能优化算法对周期阵列进行稀疏设计,本质上是在周期阵列中抽取若干阵元进行激发/接收,阵元自由度低,声场指向性和声束聚焦性能差,无法做到阵列中特定阵元激发/接收.稀布阵列的阵元在满足最小阵元间距条件下,呈非均匀分布于阵列孔径范围内,阵元排布自由度高,声场指向性和声束聚焦性能好,能有效减少数据量,降低计算复杂度,提高检测效率.
3.1 稀布阵列优化算法
遗传算法是一种具有高效并且能够在全局范围内并行的搜索方法,在搜索过程中首先要对具体问题的解空间进行规划,优化问题搜索空间采用二进制编码方式转换生成一组可行的解.在遗传算法中尽管二进制编码在实施的过程中操作简单,但是无法满足一些连续性或维度高的问题的求解,这是因为对于连续性问题离散成二进制化问题时本身就有误差,从而影响了求解的精度.另外,二进制编码的稀疏阵列的阵元间距通常为半波长的整数倍,该布置方式的自由度还有待提高.对于二进制编码的弊端可以采用实数编码进行线性阵列的稀布布阵来解决.稀布阵列的阵元在满足最小阵元间距条件下,阵元位置随机分布,阵元排布自由度高.
获得稀布阵列中阵元位置的具体过程为: 首先在进行遗传操作之前要对需要优化的问题进行实数编码,通过实数编码的形式把需要优化的问题转化成为计算机能够识别的方式,变量参数的范围为[0,L −(N −1)dc]内的任意实数,其中dc表示相邻两阵元最小距离间隔,通常选取为半个波长.设置初始化种群中的个体数,对种群适应度函数进行初始化并计算初始化种群中所有个体的适应度值.然后进行遗传算子操作,得到进化生成新的种群.最后,当达到给出的最大迭代次数后,最终得到一个具有最低旁瓣水平的稀布阵列.
3.2 稀布阵列设计模型
稀布阵列的阵元位置在孔径范围内随机分布,由于方向图中的峰值旁瓣电平与线性阵列中传感器分布位置的非线性关系较强,很难采用解析法求解出最优解.鉴于此,建立稀布阵列优化模型,在相同的阵列孔径、阵元数目、最小阵元间距条件下,显著降低峰值旁瓣电平.假设阵列的孔径为L,阵元的个数为N,第m个阵元相对于第一个阵元的位置为d m,入射波与线性阵列法向的夹角为θ,主波束的指向角度为θ0,阵列的方向图函数为[22]


为了确保稀布阵列的孔径与满阵的孔径相等,阵列左右两端必须要布置阵元,由此可得:

为了更好地理解稀布阵列阵元之间的间距,将阵元间距拆分为d=x+kdc的形式,

联立(10)式—(12)式可以推导出:

通过上述变换,实现了将阵元间距的计算转化为对xi的求解,将搜索空间的范围由[0,L]压缩为[0,L −(N −1)dc].综上所述,优化模型可以表述为: 寻找满足(13)式解的集合,使最大旁瓣水平尽可能小.
3.3 多层结构稀布阵列SAFT 成像
在维持相同的阵列孔径、阵元数目以及最小阵元间距的前提下,基于遗传算法可以设计出合适的稀布阵列,由于优化前后的孔径大小不变,因而优化前后的点散射函数也保持不变.基于射线追踪的多层结构稀布SAFT 成像过程为: 首先,将目标检测区域划分成若干个像素点,根据像素点坐标值范围计算该点位于多层结构中的某一结构层;然后,采用射线追踪方法精确计算每两个激发和接收换能器下所有像素点对应的超声波传播时间,并提取对应的采样数据,对所有采样数据进行累加;最后,得到图像范围内所有像素点的像素值为

式中,NT表示稀布发射阵元数,NR表示稀布接收阵元数;WT表示稀布发射阵元的权重,WR表示稀布接收阵元的权重;Srt表示稀布阵元NT激发的信号被稀布阵元NR所接收的信号;Trt表示声波由稀布发射阵元出发,经缺陷散射后到达稀布接收阵元的总传输时间.
4 实 验
实验采用计算机配置为中央处理器Intel(R)Core(TM)i5-4590 3.30 GHz,内存容量为8 GB,硬盘容量为1 TB.实验地点为沪杭高铁金山北站,实验对象为运营中的CRTS II (China Railway TrackSystem II) 型无砟轨道,检测其中的砂浆层与底座板之间的脱粘缺陷,该结构具体材料参数详见表1.使用A1040 MIRA 混凝土超声断层扫描仪进行数据采集,该仪器的主要参数在表2 列出.图6 为A1040 MIRA 混凝土超声断层扫描仪对CRTS II型无砟轨道砂浆层与底座板之间的脱粘缺陷进行探测的示意图.脱粘缺陷的厚度约为3 mm,脱粘缺陷的长度约为260 mm.

表1 CRTS II 型无砟轨道工程材料参数Table 1.Engineering material parameters of the ballastless track of CRTS II.

表2 A1040 MIRA 混凝土超声断层扫描仪主要参数Table 2.Main parameters of A1040 MIRA concrete ultrasonic tomography scanner.
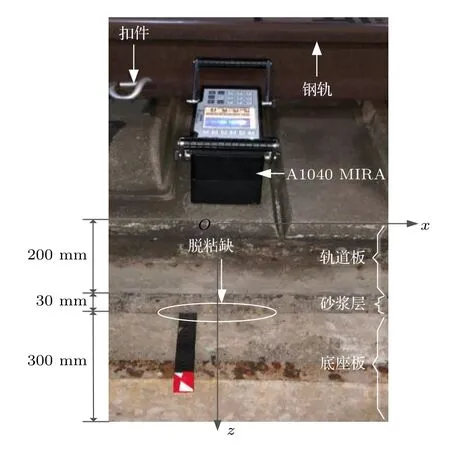
图6 脱粘缺陷示意图Fig.6.Schematic diagram of debonding defects diagram.
5 结果与分析
以实数编码的稀布阵列优化方法为基础,进行脱粘缺陷的检测.根据优化后保留阵元总数的不同分别做以下分析.当稀布阵列中阵元数量为11 个时,阵元相对位置为[0,38,77,107,137,167,197,227,257,299,330] mm,最优峰值旁瓣电平Spsl=–15.99 dB,阵列优化过程如图7 所示.成像时间为4.88 s,成像结果及剖面图分别如图8 和图9 所示.

图7 11 个阵元稀布阵列优化过程 (a)方向图;(b)迭代曲线;(c)阵元相对位置Fig.7.Optimization process of 11 elements thinned array: (a) Direction diagram;(b) iterative curve;(c) array element position.

图8 11 个阵元稀布阵列成像结果Fig.8.Imaging results of the thinned array of 11 elements.
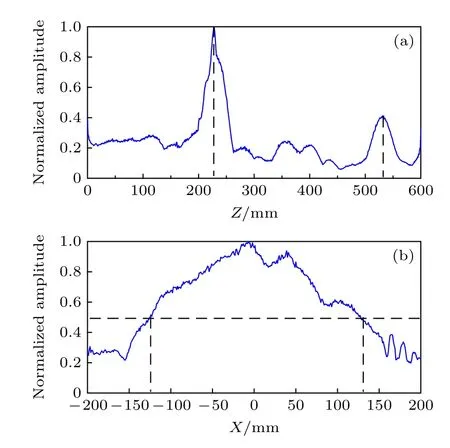
图9 11 个阵元稀布阵列成像结果剖面图 (a)纵向剖面图;(b)横向剖面图Fig.9.Cross section of imaging results of thinned array of 11 elements: (a) Longitudinal cross section;(b) transverse cross section.
通过对成像图8 的像素进行分析可知,11 个阵元稀布成像的信噪比为19.04 dB,纵向剖面如图9(a)所示的第一个波峰为Z1=228 mm,第二个波峰Z2=533 mm,因此,脱粘缺陷定位误差为2 mm,底座板底部偏差为3 mm;横向剖面图9(b)的等高线与剖面曲线交点的取值范围为(–126 mm,128 mm),即表征的脱粘长度为254 mm,长度误差为6 mm.
当稀布阵列中阵元数量为9 个时,阵元相对位置为[0,41,91,132,168,202,240,281,330] mm,最优峰值旁瓣电平SPSL=–15.35 dB,阵列优化过程如图10 所示.成像时间为3.37 s,成像结果及剖面图分别如图11 和图12 所示.

图10 9 个阵元稀布阵列优化过程 (a)方向图;(b)迭代曲线;(c)阵元相对位置Fig.10.Optimization process of 9 elements thinned array:(a) Direction diagram;(b) iterative curve;(c) array element position.
通过对成像图11 的像素进行分析可知,9 个阵元稀布成像的信噪比为17.46 dB,纵向剖面如图12(a)所示的第一个波峰为Z1=227 mm,第二个波峰Z2=534 mm,因此,脱粘缺陷定位误差为3 mm,底座板底部偏差为4 mm.横向剖面如图12(b)所示的等高线与剖面曲线交点的取值范围为(–135 mm,113 mm),即表征的脱粘长度为248 mm,长度误差为12 mm.
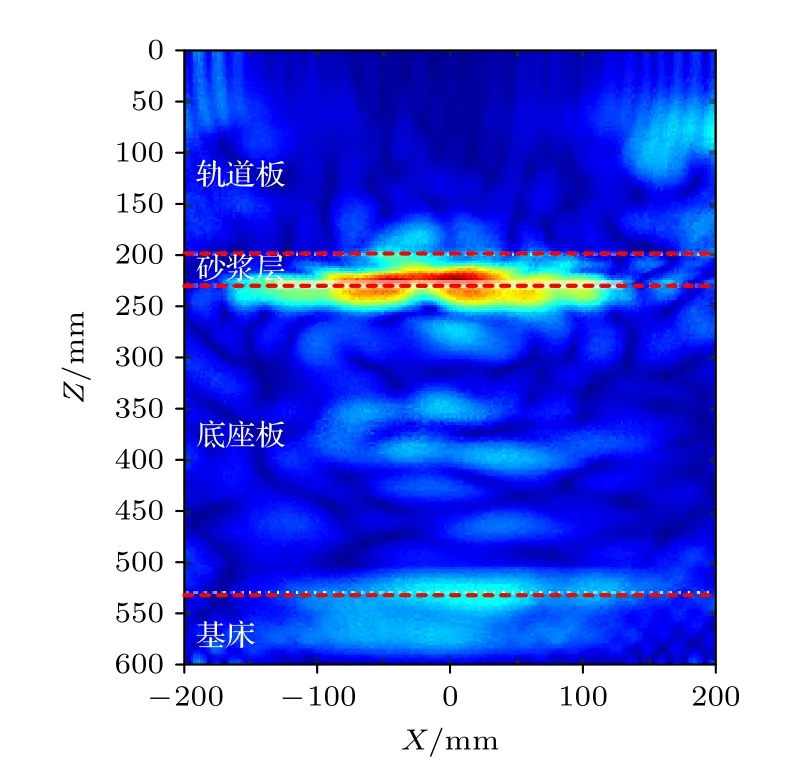
图11 9 个阵元稀布阵列成像结果Fig.11.Imaging results of thinned array of 9 elements.
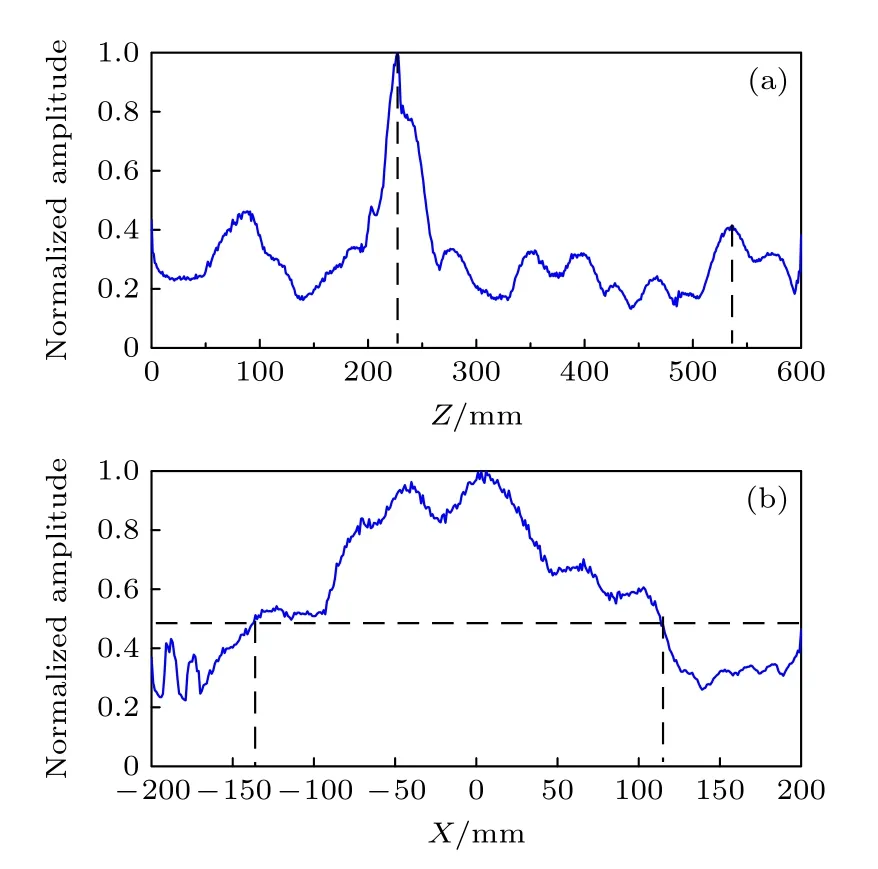
图12 9 个阵元稀布阵列成像结果剖面图 (a)纵向剖面图;(b)横向剖面图Fig.12.Cross section of imaging results of thinned array of 9 elements: (a) Longitudinal cross section;(b) transverse cross section.
6 结论
无砟轨道是由轨道板、砂浆层、底座板和基床组成的非连续阻抗混凝土粘接结构,层间声速差异显著.传统的超声检测采用恒定声速进行成像,检测误差大、效率低.建立多层结构声速模型,采用射线追踪方法准确计算超声波的传播路径和传播时间.提出实数编码的稀布阵列方法,利用多层结构合成孔径方法采集超声信号,进行成像,分析结果得出以下结论.
1)针对无砟轨道层间声阻抗差异较大,将其视为非均匀声速复合弹性板结构,建立多层声速理论模型,采用射线追踪方法精确求得声波在层间声速差异大的介质中的传播路径和走时,提高了检测精度.
2)采用实数编码的稀布阵列方法,进行SAFT成像.实验结果表明: 稀布阵列具有更窄的主瓣宽度,更低的旁瓣增益,阵元自由度得到显著提高.当成像误差在±5%以内时,稀布阵列SAFT 成像方法的效率提高了30.9%.
3)随着有效阵元个数的减少,稀布阵列下的旁瓣增益都在逐渐增大,脱粘缺陷的检测精度也随之减低,为保证成像质量和检测精度,有效阵元数量必须位于合理的区间范围内.
