基于GPS和惯性导航的主动安全试验装置
2023-02-18杨新鹏肖广宇蒋熊力忍刘汉渝
杨新鹏,肖广宇,张 帅,蒋熊力忍,刘汉渝
基于GPS和惯性导航的主动安全试验装置
杨新鹏,肖广宇,张 帅,蒋熊力忍,刘汉渝
(中汽研汽车检验中心(天津)有限公司,天津 300300)
为满足汽车主动安全测试标准中自动紧急制动(AEB)的测试需求,文章论述了一种基于全球定位系统(GPS)和惯性导航装置的主动安全试验装置。该试验装置主要包括自动驾驶机器人、可导航移动平台、实时动态(RTK)基站以及上位机(PC)控制系统。上位机控制系统的软件可以根据《中国新车评价规程》(C-NCAP)中的场景需求设置不同的试验方案,驱动测试车辆和可导航移动平台按照规定的路线和速度移动,并且测试车辆的中驾驶机器人可以和可导航移动平台实现数据及信号的互联互通。该试验装置可以用于C-NCAP的AEB中的车辆追尾(CCR)测试,根据试验结果,此装置在汽车主动安全测试中具有较强的实际应用价值。
GPS导航;惯性导航;RTK差分技术;AEB试验装置
根据联合国世界卫生组织道路安全全球现状报告,每年重特大事故中,交通事故数和因交通事故死亡人数分别占到总数的69%和78.9%[1],为了降低交通事故造成的危害,自动紧急制动系统在汽车上的安装率也越来越高。数据显示,配备自动紧急制动系统的车辆可以大大提升道路安全水平。自动紧急制动(Automatic Emergency Brak- ing, AEB)系统是一项利用车辆上安装的视觉系统或者雷达等传感器,基于实时收集自身及外部车辆相关信息,进行静态、动态物体检测的机动车主动安全系统[2],能够在车辆自身主动检测到前方存在碰撞危险的时候,自动启动行车制动使车辆减速刹停,尽可能避免发生碰撞。
此系统目前受到国家、地方政府、主机厂、零部件厂商以及科研院所越来越多的重视[3]。因此,有必要对汽车的AEB性能进行试验及评估。近些年,西方国家及地区相继颁布了针对车辆AEB系统的测试章程或标准,中国也随后出台了相关的测试规程[4],由于测试过程中车辆会进行频繁剧烈的减速和刹车等运动,长时间及多次数的试验会对驾驶试验员的身体舒适性有很大影响,本文论述了一种基于全球定位系统(Global Positi- oning System, GPS)和惯性导航组合的自动AEB试验装置。
1 导航组合系统
1.1 GPS全球导航系统
经过了长时间的发展,导航技术出现了多种方式的导航系统,比如GPS全球卫星导航系统、地磁导航系统、视觉导航系统等。其中最常用的GPS全球卫星导航系统由空间卫星、地面监控和用户设备组成,理想情况下4颗卫星即可完成对地面目标物的定位,其单点定位精度大约在几十米,其中3颗卫星可以根据计算得出目标物的空间三维坐标(),第4颗卫星用来处理这3颗卫星之间信息接收时间的差别。
它能够为使用者提供全球性、全天候、实时、连续被测物体的三维坐标位置、移动速度以及时间信息,不过GPS的信息更新频率比较低而且信号容易受到遮挡和干扰而丢失。GPS的测量误差分为系统误差和偶然误差,偶然误差主要包括观测误差及信号的多路径效应产生的误差等;系统误差主要包括卫星的卫星钟差、轨道误差、大气折射误差以及接收机钟差等[3]。在这种误差量级下,单独靠GPS全球卫星导航系统不能满足主动安全试验的车辆定位需求,在稳定性和定位精度上存在很大瓶颈,这就要靠惯性导航辅助进行精确定位。
1.2 惯性导航系统
惯性导航系统(Inertial Navigation System, INS)简称惯导,是试验装置中对车辆进行精确定位的核心设备。惯性导航以牛顿力学定律为基础,通过加速度计和陀螺仪实时测量车辆当前的角速度、加速度等姿态信息[5],依靠算法对加速度等数据进行对时间的积分可以得到车辆三个坐标方向实时的速度信息,经过再次积分就可以得到被测物体在三个坐标方向上相应的位移信息。同样,陀螺仪经过计算得出车辆的航向角、俯仰角、侧倾角等姿态信息。惯性导航的优点是不依赖其他设备的外界信息并且数据信息更新频率高,但存在偏差累积和噪音的缺点,系统误差会随着时间越来越大,定位误差与时间成正相关。惯性导航系统和GPS导航系统两者结合取长补短,运用实时动态(Real Time Kinematic, RTK)差分算法能达到比较好的定位效果,从而提高导航系统组合的整体性能。
1.3 RTK差分技术
RTK差分技术即实时动态载波相位差分技术,通过载波相位观测的实时动态信息,可以实现被测物体在空间中的精准三维定位,其精度可以达到厘米级。在RTK参与GPS和惯性导航的组合定位过程中,RTK基站与RTK移动站都由相同的卫星获取实时的GPS数据信息。同时基站将接收到的GPS数据发送给移动站,移动站结合自身的GPS定位数据以及惯性导航的测量信息,进行载波相位差分解算,从而消除绝大多数系统误差,大幅提高定位精度。移动站和基站只要同步保持四颗以上的卫星相位观测值的跟踪,即可实现移动站厘米级精度的定位。
惯导RTK差分技术在AEB测试装置中具有两个作用:用于对前后车运动的起始和行驶终点位置进行精确定位;实时测量测试车辆及被测车辆精确的加速度、速度和位移信息。
2 系统组成及原理
AEB测试装置由自动驾驶机器人、可导航移动平台、RTK基站、RTK移动站、导航系统组合以及上位机等硬件组成,如图1所示。上位机中的软件可以对试验场景进行选择,并且可以根据用户需求新建其他的试验场景。RTK基站在试验场应放置在空旷的地方,以减少对接收信号的影响,RTK移动站分别放置在测试测量和可导航移动平台上。
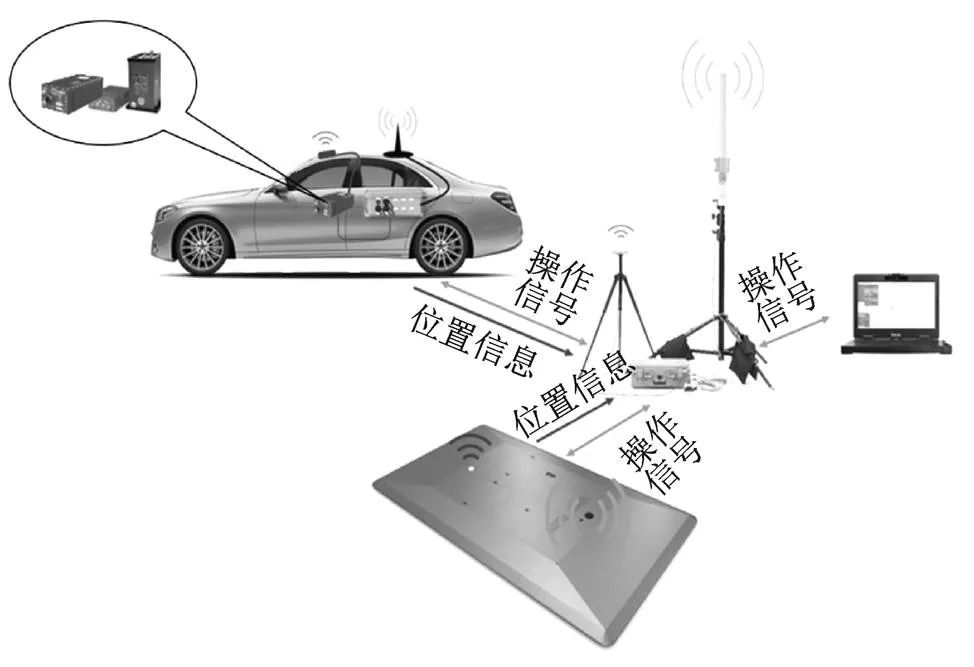
图1 系统组成示意图
在此试验装置中,自动驾驶机器人将代替真实驾驶员来操控测试车辆,驾驶机器人会按照上位机中预先选定的场景中设置的行驶轨迹运行,精准化控制测试车辆的起步、加速及减速制动。测试车辆中搭载了RTK差分定位模块、移动接收站以及GPS定位模块,可以实时收集测试车辆精确的加速度、速度、位置及偏航角等信息。可导航移动平台同样也配备了RTK差分定位模块、移动接收站及GPS定位模块等装置,RTK差分系统可以实现可导航移动平台的精确定位。可导航移动平台通过上位机控制器发来的信号控制电机运行实现其加减速和匀速行驶以及在设定的位置制动。
RTK差分定位模块由基站和移动站组成,其具体结构如图2所示。差分系统由对应的板卡、RTK电台等组成。
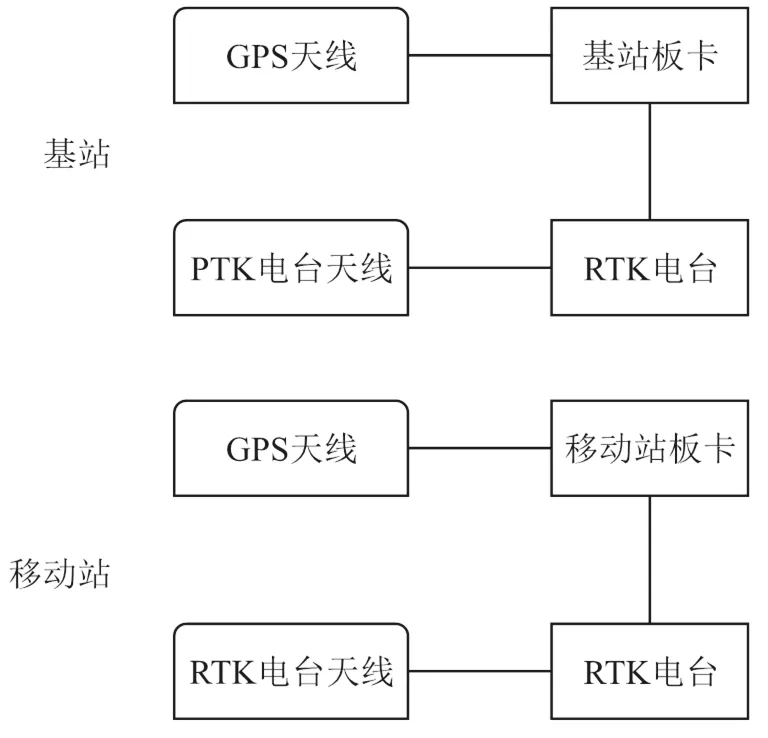
图2 RTK结构示意图
同时,试验测试装置中的驾驶机器人与可导航移动平台均搭载无线通讯模块,可以实现数据及信息的实时互通。无线通讯模块具有两个不同频段的通讯通道。其中RTK基站将接收到的GPS卫星导航数据及信息通过低频段的无线通信通道发送给自动驾驶机器人和可导航移动平台中的RTK移动站,然后分别将接收到的GPS信息以及自身的惯性导航测量的位置数据信息进行差分解算实现精确定位。可导航移动平台可以通过高频段通信信道将被测车辆的位置、速度信息发送给上位机系统,上位机系统根据接收到的这些信息计算出的相应转向角、速度等信息发送给自动驾驶机器人完成相应的动作指令。同样,上位机系统可以通过高频段通信信道将测试车辆的位置、速度信息以及控制运动的信号发送给可导航移动平台。
GPS和惯导的组合导航系统在应用层面上一般采用国外进口的产品,比如美国的Trimble公司、法国的SBG公司的产品等等。本文所述的AEB试验装置采用OXTS公司的RT3000v3组合导航装置,其性能指标如表1所示。此组合导航系统在RTK差分算法下的定位精度可以达到0.01 m,速度测量精度为0.05 km/h。

表1 RT3000v3性能
此导航组合设备采用RS232串口方式输出数据,使用工控机、上位机(Personal Computer, PC)、嵌入式控制器等计算平台,通过串口与导航组合设备连接,读取导航组合设备输出的串口数据,根据数据格式协议进行解析,选取所需的数据(如经纬度、航向角等),通过坐标转换,得到平面坐标系下的坐标信息(,)。
综上所述,AEB测试装置利用融合了差分定位技术与惯导定位技术的组合定位设备,依据所计算出的位置信息建立车辆高精度轨迹路径,然后通过给驾驶机器人发送控制指令来控制汽车,使车辆能够沿着已经规划好的目标路径正常行驶并完成整个试验过程。
3 AEB试验测试
《中国新车评价规程》(China-New Car Asses- sment Programme, C-NCAP)里面主动安全测试的自动紧急制动系统测试和评价方法中的测试工况包括车-车、车-人和误作用三大类,其中车-车工况包含前方静止车辆追尾(Car-to-Car Rear Statio- nary, CCRs)、前方匀速行驶车辆追尾(Car-to-Car Rear Moving, CCRm);车-人工况包含车辆碰撞近端行人(Car-to-Pedestrian Nearside Adult-25, CPNA-25)、车辆碰撞远侧行人(Car-to-Pedestrian Farside Adult-25, CPFA-25)、CPFA-50、车辆碰撞近侧行人(Car-to-Vulnerable Nearside Adult-75, CVNA-75)等场景,误作用包含相邻车道制动试验和铁板实验[6],本文论述的试验装置在实际试验中选用车辆追尾(Car-to-Car Rear, CCR)测试来验证其实用性,试验工况如表2所示。

表2 CCR试验场景
在CCRs测试中,测试车辆分别以20 km/h、30 km/h、40 km/h的速度向目标车行驶,目标车(Global Vehicle Target, GVT)在实验过程中静止,如图3所示。
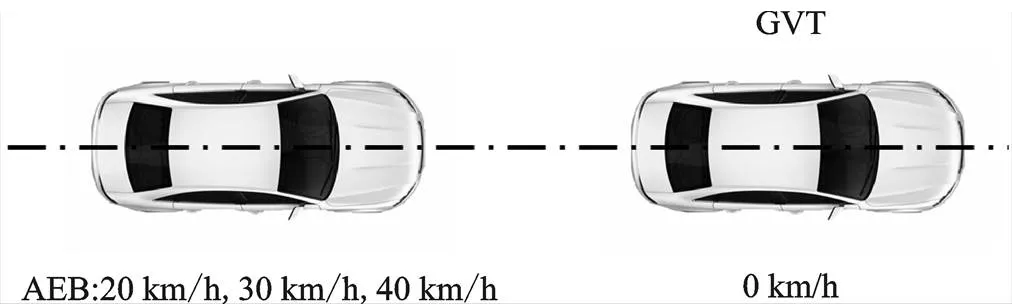
图3 CCRs试验示意
CCRm测试中,测试车辆分别以30 km/h、 40 km/h、50 km/h的速度向目标车行驶,目标车在实验过程中速度为20 km/h,如图4所示。
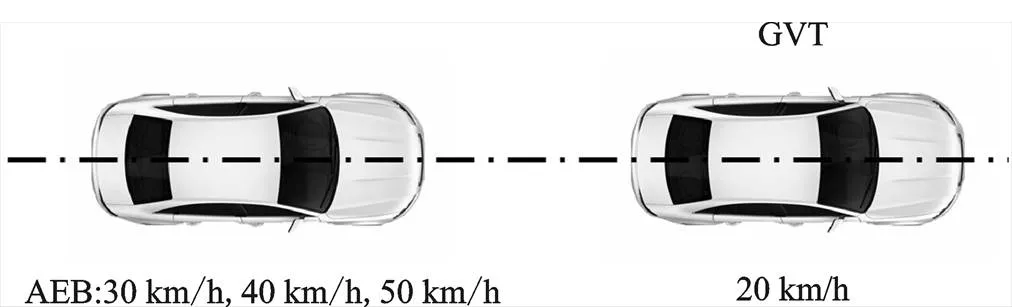
图4 CCRm试验示意
首先,确定一个CCRm试验的具体场景,使测试车处于自动驾驶模式,按照规划路径行驶,测试车辆以50 km/h的车速匀速靠近被测车辆,被测车辆的车速为20 km/h恒定车速,且测试车辆与被测车辆中心线重合并相距一定距离,即偏移量为0%。最后上位机根据场景设置得出两车触发刹车的地点后开始试验,在测试车辆根据系统算出的轨迹移动到距离目标车设定的距离时,给目标车发送信号使其开始运动,最终到达设定的终点两车停止,实验结束,实验结果如表3、表4所示。

表3 测试车辆实验结果

表4 目标车辆实验结果
在整个测试过程中,测试车辆中心线和目标车中心线在自动驾驶机器人和可移动平台的作用下处于同一条直线上,最大偏移不超过预设中心线±0.1 m,并且由实验结果可以看出测试车辆和目标车辆的行驶速度和预设的速度一致,因此,此搭配GPS导航系统、惯性导航系统组合的试验装置,通过RTK差分技术在试验过程中对测试车辆和被测车辆可以达到非常高的测量精度,可以满足试验要求。
4 结论
本文对基于GPS和惯导组合的车辆AEB试验装置进行了论述,此试验装置可以根据C-NCAP的AEB测试要求对CCR试验进行测试,可以对被测车辆和测试车辆进行准确定位,从而实现移动过程的精准控制。同时通过试验结果,证明该导航组合能够对试验中的车辆进行有效而精确的定位,能够满足AEB实验装置系统的需要。
[1] 张新,谢旭敏.AEB行人检测系统的设计与验证分析[J].重庆理工大学学报(自然科学),2021,35(11):67-73, 149.
[2] 周文帅,李妍,王润民,等.自动紧急制动系统(AEB)测试评价方法研究进展综述[J].汽车实用技术,2020, 45(18):34-40,49.
[3] 房建伟.AEB行人测试装置的关键技术研究[D].长沙:湖南大学,2018.
[4] 任锦涛.基于高精度组合定位设备的智能车辆路径追踪研究[D].西安:长安大学,2020.
[5] 钟振,王祥.基于RTK的GNSS/INS实时组合导航系统设计[J].现代信息科技,2021,5(12):72-74,79.
[6] 兰永斌,赵帅,时彦平,等.AEB行人检测系统的设计与试验验证[J].河南科技,2021,40(15):8-13.
Active Safety Test Device Based on GPS and Inertial Navigation
YANG Xinpeng, XIAO Guangyu, ZHANG Shuai, JIANG Xiongliren, LIU Hanyu
( CATARC Automotive Test Center (Tianjin) Company Limited, Tianjin 300300, China )
In order to meet the testing requirements of automatic emergency braking (AEB) in the automobile active safety test standard, this paper discusses an active safety test device based on global positioning system (GPS) and inertial navigation device. The testing device includes automated driving robot, navigation mobile platform,real time kinematic (RTK) base station and personal computer (PC) control system. PC software of the control system can set different test scenarios according to the demand of(C-NCAP). It can drive the test vehicle and navigation mobile platform in accordance with the prescribed route and speed that set in the control system. And it can send and achieve the data and signal between the automated driving robot and the navigation mobile platform. The test device can be used for car-to-car rear (CCR) test of AEB in C-NCAP. According to the test performance, it has practical application value in AEB tests.
GPS navigation; Inertial navigation; RTK differential technology;AEB test device
U463.5
A
1671-7988(2023)03-122-04
10.16638/j.cnki.1671-7988.2023.03.023
杨新鹏(1990—),男,硕士,工程师,研究方向为非标设备研发,E-mail:yangxinpeng173@163.com。
