称重标定块转运机器人系统设计
2023-02-18杨海涛丰飞孙占荣陈凡
杨海涛,丰飞,孙占荣,陈凡
(1.江苏集萃华科智能装备科技有限公司,江苏 无锡 214000;2.华中科技大学,武汉 430000;3.华中科技大学 无锡研究院,江苏 无锡 214000)
0 引言
钢厂生产的特钢棒材都需要执行严苛的生产标准来进行质量管控,而棒材的质量参数是衡量棒材品质的一个关键指标[1-2]。特钢企业目前均采用大量程称重传感器构建的台秤系统实现成捆棒材的称量作业[3-5]。而称重传感器作为称重系统测量的敏感元件,易受环境温度、时间等因素的影响,长期工作会产生温漂和零漂,降低称重系统的测量精度,因此需要采用具有精确质量的称重标定块对称重系统进行周期性的标定工作[6-8]。
目前,钢厂称重标定块的搬运通常需要工人在现场定时操作行车通过吊装方式完成。该称重标定块为超长超重的矩形钢坯件,行车操作采用锁具吊装作业方式,不仅很难将称重块精准定位到秤台中心位置,经常会导致称重传感器的受力不均匀;而且人工放置很难控制放置的力道和速度,从而不可避免在放置时称重标定块与称重系统发生碰撞和冲击。受力不均或者碰撞和冲击的产生,一方面会影响棒材质量称量数据的准确性和可靠性,另一方面会缩短称重系统的使用寿命。人工行车吊装称重块还会对操作人员产生的一定的安全问题[9-12]。针对上述人工操作行车吊装搬运称重标定块的不足之处,根据钢厂称重系统的实际状况,针对特钢棒材精整生产线棒材称重系统的标定工作设计了一种称重标定块自动转运机器人,通过对该称重标定块转运机器人系统进行控制,可以实现称重标定块的自动取放工作,操作安全方便,并且无需人工监控。
1 称重标定块转运机器人系统功能
本文设计的称重标定块转运机器人系统的三维结构如图1所示,包括轴测图、正视图和俯视图。该转运机器人系统需要实现的主要功能如下:1)当称重系统需要标定时,将称重标定块从称重放置台架上平稳地转运到称重系统上;2)当称重系统标定完成后,需要将称重标定块从称重系统上取回到称重块放置台架上,等待下一次称重块标定工作。
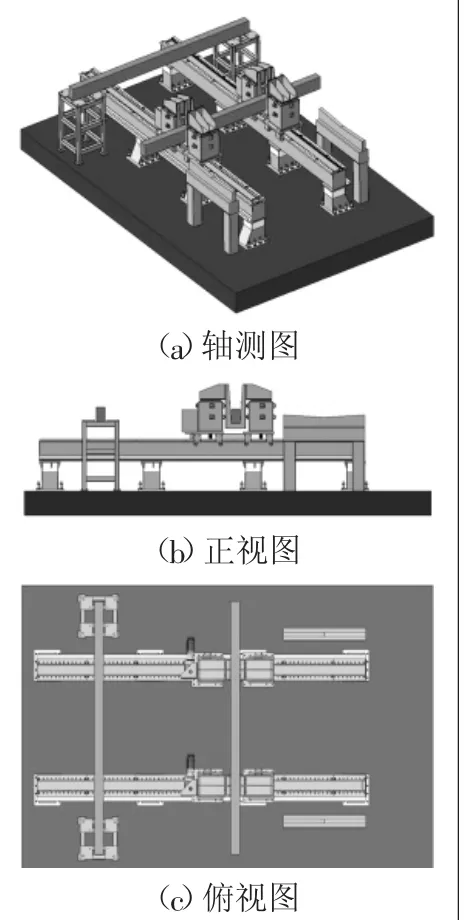
图1 称重标定块转运机器人系统
本文的称重标定块转运机器人系统的控制需要实现工人在现场操作台能够独立控制称重标定块转运机器人工作,也可以在远程控制室总控台发送控制指令控制称重标定块转运机器人的工作。考虑到称重标定块转运操作的安全性问题,在转运机器人控制系统中,控制指令权限设置的优先级是现场操控台下发的指令优先级高于远程控制室总控台下发的指令。
2 称重标定块转运机器人结构设计
称重标定块转运机器人系统的总体结构如图2所示,主要由直线运动模块、同步顶升模块、称重标定块放置台架、称重标定块夹持与支撑台等功能部件组成[13]。

图2 称重标定块转运机器人的总体结构图
称重标定块放置台架如图3所示,放置在底座上,称重标定块平行于称重装置的安装方向,称重标定块放置台架与称重装置平行放置。直线运动模块设置在称重系统内部,对称放置的直线运动模块与称重标定块长度方向垂直。每个直线运动模块上均安装有一套载板组件,每套载板组件上安装有一套同步顶升模块。
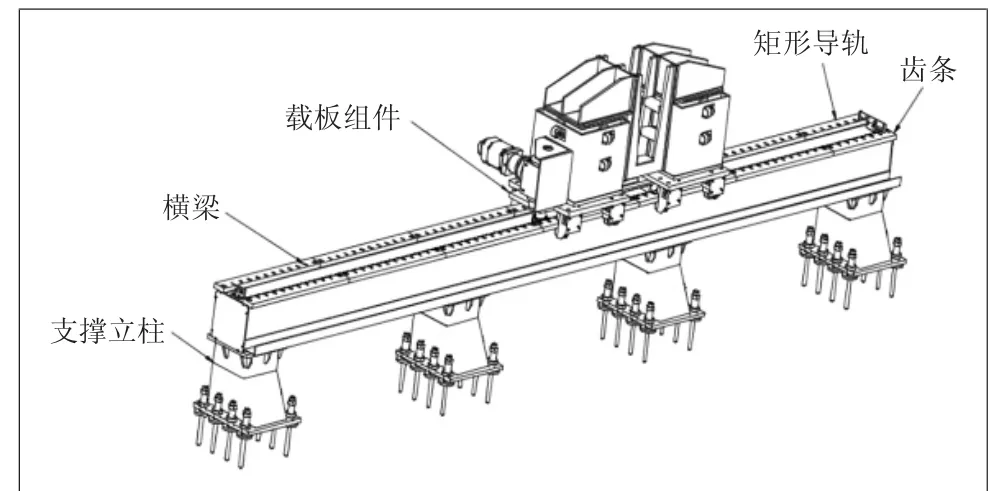
图3 称重标定块台架
转运机器人系统的每侧均采用两套同步顶升模块,搭载称重标定块实现超长超重的称重标定块的搬运。称重标定块通过安装在直线运动模块上的同步顶升模块的同步运动,可实现称重标定块的顶升和下降运动。同步顶升模块包括安装底板、外壳体、内部伸缩套筒、顶部安装板、顶升电动推杆、顶升电动推杆安装基座、导向滚轮、顶升导轨、顶升伺服电动机、顶升减速器和顶升同步带传动系统。
每个直线运动模块上均设置有两套载板组件,其中一套为带伺服驱动电动机的主动载板,另一套为随动载板,主动载板与随动载板之间通过两套拉杆机构连接实现同步直线运动。
3 称重标定块转运机器人控制系统
称重标定块转运机器人的控制系统的组成如图4所示,主要由产线总控计算机、现场控制计算机、倍福控制器、人机交互界面设备HMI、伺服驱动器、伺服电动机,以及其他检测传感器(接近传感器、限位开关)等组成。该称重标定块转运机器人的总控计算机与现场控制计算机之间采用以太网通信,现场控制计算机与倍福控制器之间也采用以太网通信。倍福控制器与伺服驱动器之间采用Profinet总线控制,与接近传感器/限位开关之间采用IO控制。

图4 称重桁架机器人伺服控制系统
称重标定块转运机器人的主控制器采用倍福控制器,伺服驱动器采用西门子伺服驱动器,倍福控制器与西门子伺服驱动器之间采用Profinet总线通信。称重标定块转运机器人的运动控制采用西门子伺服电动机自带的绝对编码器来实现基于位置的闭环伺服控制,转运机器人到达指定位置停止后由制动器对电动机进行锁紧操作,同步顶升模块和水平直线运动模块安装有接近传感器和限位开关,可以实现对转运机器人上是否运动到指定位置和是否超过限位进行检测和判断。该运转机器人控制系统可以控制同步顶升模块和水平直线运动模块的伺服运动,并可与现场控制计算机和产线控制计算机通过以太网总线等实现信息和指令的通信。称重标定块转运机器人的运动可以由产线控制计算机(或现场控制计算机)通过以太网通信将控制指令发送给倍福控制器,倍福控制器根据产线控制计算机(或现场控制计算机)的指令来控制称重标定块转运机器人的运动。针对称重标定块的转运操作,倍福控制器编写不同的运动规划与控制子程序,实现对称重标定块的可靠安全转运工作。
转运机器人的同步顶升模块是负责称重标定块的举升和下落运动,该模块需要控制两组同步伺服电动机。水平直线运动模块负责称重标定块的水平运动,该模块需要控制一组同步伺服电动机。伺服电动机之间的同步运动控制通过倍福控制器和伺服驱动器之间Profinet总线进行实时通信,并以倍福控制器进行虚拟主轴的编程,然后通过虚拟主轴控制多个从轴可以实现伺服电动机的同步运动功能。
4 称重标定块转运机器人工作流程
称重标定块转运机器人系统实现称重标定块取放的软件流程如图5所示。称重标定块转运机器人的控制可以通过产线总控计算机在总控室进行控制,也可以通过现场控制计算机在现场控制台进行控制。称重标定块转运机器人通过产线总控计算机进行控制的工作流程如下:首先,产线总控计算机通过以太网下发称重标定块称重的转运指令给现场控制计算机,现场控制计算机再通过以太网将相关指令发送给倍福控制器,倍福控制器接收到控制指令后调用对应的称重标定块称重转运子程序,实现称重标定块称重转运操作任务。当称重标定块对称重系统标定任务完成后,产线总控计算机通过以太网下发称重标定块取回的转运指令给现场控制计算机,现场控制计算机再通过以太网将相关指令发送给倍福控制器,倍福控制器接收到控制指令后调用对应的称重标定块取回转运子程序,实现将称重标定块放归原位的操作任务。人机交互界面HMI(控制面板)可以进行称重标定块转运机器人的调试工作,并可以实时显示称重标定块转运机器人的故障信息和运动状态信息等。

图5 称重标定块转运机器人的工作流程
5 结论
本文介绍了对钢厂称重系统进行周期性标定工作的称重标定块转运的机器人系统设计。该转运机器人实现称重标定块的自动取放工作,避免了人工通过行车搬运的危险性。本文详细介绍了称重标定块转运机器人系统的功能、机械结构设计、控制系统以及工作流程等。
