考虑胶轮电车-轨道耦合效应的导轨梁受力分析
2023-02-13占玉林邵俊虎王吉坤黎泰良
占玉林,许 俊,邵俊虎,王吉坤,黎泰良
(1.西南交通大学 桥梁工程系,四川 成都 610031;2.西南交通大学 土木工程材料研究所,四川 成都 610031;3. 中铁第四勘察设计院集团有限公司 线路站场设计研究院,湖北 武汉 430063; 4.成都大学 建筑与土木工程学院,四川 成都 610106;5.中铁四院集团西南勘察设计有限公司 桥隧所,云南 昆明 650206)
云巴胶轮有轨电车转弯半径小、爬坡能力强、可无人驾驶,相比跨座式单轨交通具有造价更低、工期更短等优点,为缓解城市交通拥堵问题提供了新的发展方向。钢导轨梁作为车辆行驶的载体,是保证车辆安全运行的关键,随着车辆运行速度和导轨梁跨径不断提高,轮轨耦合作用更加复杂,而车辆制动时引起的结构动力冲击效应则更为显著[1-2]。因此,轮轨耦合作用下导轨梁及其锚固构件动力响应问题的研究具有重要意义。
针对轮轨耦合问题,国内外学者进行了广泛的理论分析和试验研究。Zhai等[3]建立了车轨耦合动力学理论体系,将车辆模拟为刚体,钢轨被视为无限长的梁,通过现场试验验证了其有效性;Tran等[4]研究了制动转矩、车轮与钢轨间静摩擦系数、列车初始速度和钢轨平整度对高速铁路动力响应的影响;文献[5-6]对高速铁路列车在不同行驶速度下的轮轨动力响应进行了分析;文献[7-8]研究了车轮横移量和车轮多边形等因素对轮轨垂向接触力的影响;文献[9-10]对跨座式单轨交通中车辆与轨道梁的动力相互作用进行研究;Sladkowski等[11]建立了轮轨接触问题的三维有限元模型,分析了不同形式轨道以及车轮踏面接触时,接触斑的形状以及接触应力分布等情况。上述研究多集中于高速铁路中轮轨耦合作用对列车和轨道的影响,而对轨道锚固构件的受力性能却少有研究;此外,在静动力荷载作用下,钢导轨梁的受力是否合理也缺乏系统研究。
本文基于LS-DYNA大型有限元仿真平台,建立胶轮有轨电车-导轨梁耦合动力学模型,通过重力初始化得到车辆静止时的轮轨接触力,并与车辆轴重进行对比和校核。在此基础上,以不同车辆行驶速度、不同刹车速度和不同螺栓间距为计算工况,研究导轨梁和锚固螺栓的动力响应特点及规律。
1 车辆-导轨梁有限元模型
1.1 车辆模型
本文采用LS-DYNA有限元软件建立了胶轮有轨电车-导轨梁耦合模型,车辆以比亚迪云巴胶轮有轨电车为对象,简化为车体、弹簧阻尼和轮对3个部分,其中,轮对又分别为轮胎、轮毂和车轴。为使车辆在下落后能在短时间内达到稳定,在车轮质心与车体之间添加一个阻尼单元,通过一个弹簧单元将车体荷载传递至车轮,车辆前轴与后轴的轴重均为62.5 kN,同一节车厢前后轴距为4.2 m,相邻车厢之间的最小轴距为3.8 m。车辆三维实体图见图1。

图1 车辆三维实体图
在图1中,轮胎、轮毂和车体采用弹性材料进行模拟,车轴不参与轮轨接触,采用刚性材料模拟,材料参数见表1。弹簧、阻尼分别采用线性弹性弹簧和线性黏性阻尼器模拟;为避免沙漏效应,实体单元采用单点积分和刚性沙漏控制[12],车辆参数见表2。
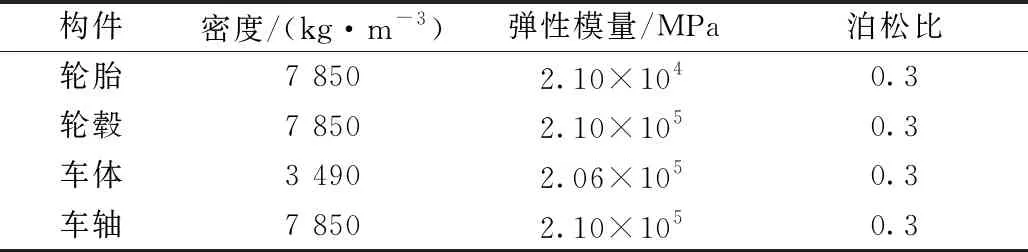
表1 材料特性

表2 车辆参数
1.2 导轨梁模型
导轨梁有限元模型见图2。导轨梁单元类型为Shell163,采用95.88m长的全钢结构,由顶板、底板、腹板和横隔板组成。导轨梁每隔一定距离在垫板处通过高强螺栓锚固于混凝土主梁上,为模拟混凝土主梁对导轨梁的弹性支撑作用,导轨梁底部与混凝土主梁之间采用仅受压弹簧进行连接,并对弹簧底部固结,弹簧采用Combi165单元模拟。为简化计算模型,将高强螺栓对导轨梁的锚固作用近似用垫板处节点固结的方式模拟。
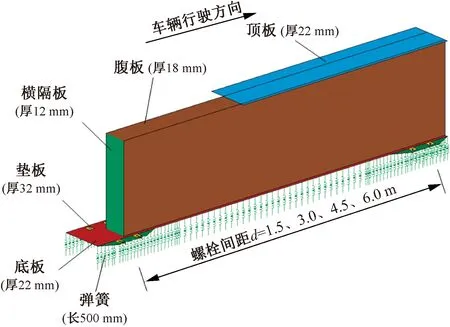
图2 导轨梁有限元模型
1.3 接触设置
车辆与导轨梁之间的接触通过关键字*CONTACT_AUTOMATIC_SURFACE_TO_SURFACE设置为双向自动接触类型,车轮面设置为从接触面,钢导轨梁顶板设置为主接触面。LS-DYNA程序处理接触问题主要有节点约束法、对称罚函数法和分配参数法三种不同算法,本文采用对称罚函数法[13]。罚函数法允许接触体间产生少量穿透,没有增加系统运动方程的自由度数,且容易通过显式积分方法求解。图3为由弹簧阻尼系统构成的三维轮轨接触模型。在垂向(y方向),根据轮轨接触关系设置和动态计算的需要,车轮踏面与导轨梁顶板之间留有5mm的间隙。

图3 三维轮轨接触有限元模型
2 车辆-导轨梁耦合有限元模型校验
2.1 重力初始化
如果将重力和速度同时施加给车辆,那么车辆在重力作用和水平速度的叠加作用下,不仅会产生纵向位移,而且会上下振动,造成导轨梁在车辆两个方向的合力作用下受力过大,从而难以模拟出车辆的实际运动状态[14]。因此,在给车辆模型施加速度之前,先缓慢施加结构自重,对导轨梁和车辆施加一个大阻尼,使之保持平衡并逐渐稳定,即重力初始化。重力初始化时间设置为2 s,在这个过程中得到车体上某一点的竖向位移时程曲线见图4。

图4 车辆竖向位移时程曲线
由图4可知,车辆在0~0.5 s时间段内先自由下落后作竖向往返运动,在0.5 s时,车辆竖向位移不再大幅度变化,约为-5.06 mm;在0.5~2.0 s内,车辆竖向位移逐渐达到稳定。由此可见,车辆-导轨梁耦合有限元模型重力初始化过程合理,结果较为准确。
2.2 轮轨接触力
通过LS-DYNA显式动力学分析,得到有限元模型中车辆前轴和后轴与导轨梁的垂向接触力及动力系数。
车轨垂向接触力及动力系数时程曲见图5。由图5(a)可知,0~1 s为车辆下落阶段,接触力逐渐达到稳定,1~2 s为车辆静止阶段,轮轨接触力大致等于轴重62.5 kN,2~5.3 s为车辆运行阶段,车辆前轴和后轴与导轨梁顶面的接触力均在理论值62.5 kN上下一定范围内波动。前轴与顶板的接触力数值范围为50.9~71.8 kN,与接触力理论值62.5 kN的最大差值百分比为18.5%,后轴与顶板的接触力数值范围为50.9~74.4 kN,与接触力理论值62.5 kN的最大差值百分比为19.0%。研究发现,接触力数值产生较大波动均是由导轨梁横隔板处截面加劲引起,而其余部位的接触力数值则相对稳定。

图5 车轨垂向接触力及动力系数时程曲线
车辆在通过导轨梁时会引起结构振动,产生的内力和变形大于静力荷载作用下的响应。因此,有必要对车辆荷载作用下结构的竖向动力效应加以检验。文献[15]用动力系数表示移动列车荷载作用下引起的桥梁结构动态响应增量与静态响应的比值,本文采用轮轨接触力反算动力系数,见图5(b)。由图5(b)可知,在车辆行驶过程中,导轨梁的动力系数在0~0.2内波动,最大值为0.19,与现有公路桥梁和铁路桥梁的动力系数相比均较小[16-17],初步验证模型的有效性。
2.3 单轴模型验证
为进一步验证车辆-导轨梁耦合有限元模型的有效性,建立单轴车辆与简支梁耦合模型,相关参数取自文献[18]。简支梁跨径L=16 m,梁抗弯刚度EIb=2.05×1010N·m2,单位长度质量mb=9.365×103kg/m,单轴车辆车轮质量m1=1.69×104kg,弹簧上部车体质量m2=4.69×104kg,悬挂弹簧刚度k=4.87×106N/m,阻尼c=3.14×106kg/s。求得车速为40 m/s时简支梁跨中挠度时程曲线,见图6。
由图6可知,采用本文模型计算得到的桥梁跨中挠度位移时程曲线与文献[18]趋势大致相同,且挠度值相差较小,从而验证模型的有效性。
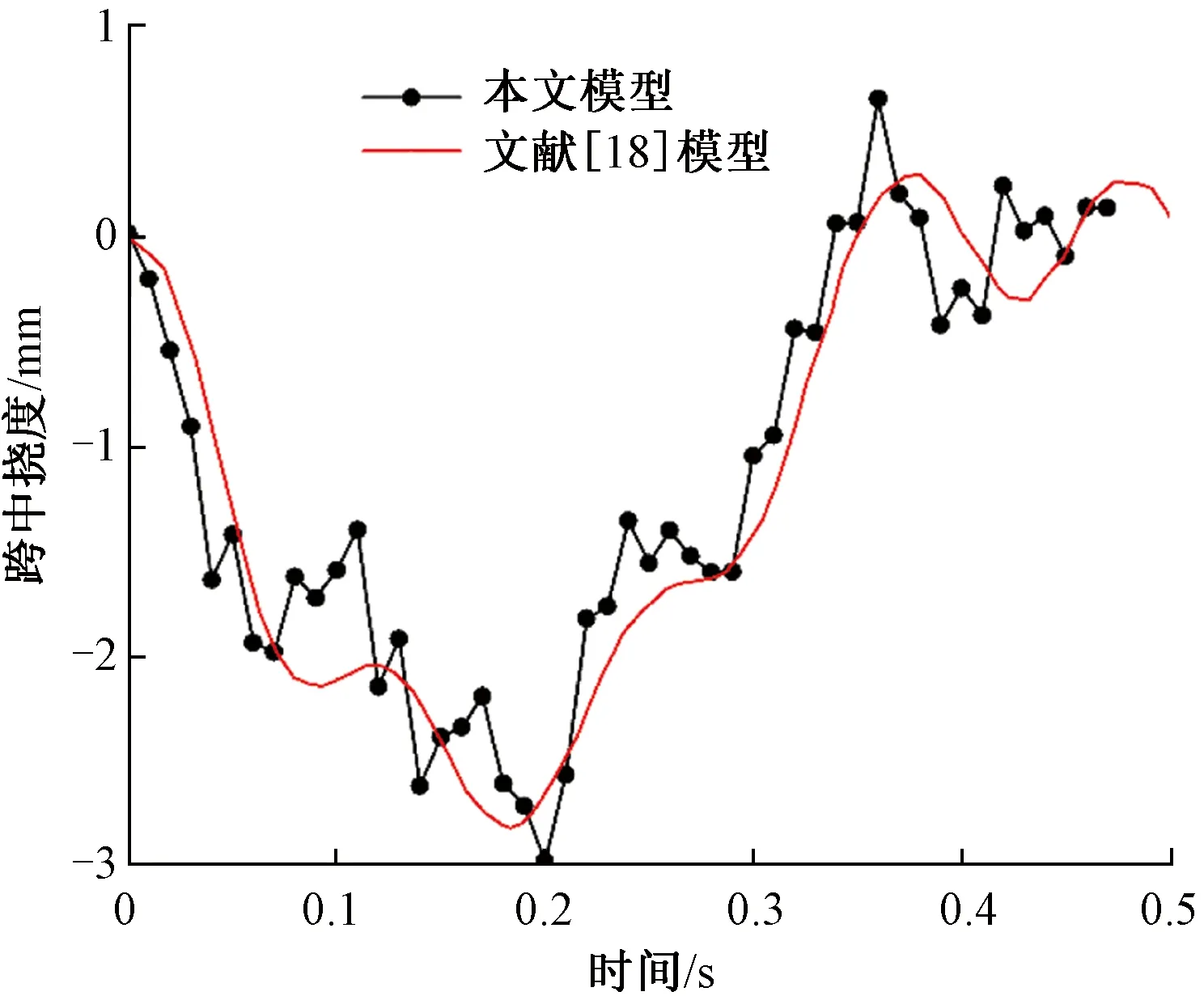
图6 简支梁跨中挠度对比
3 结构动力响应分析
针对不同车辆行驶速度、刹车速度以及螺栓间距,选取了9个计算工况进行结构动力响应分析,见表3。
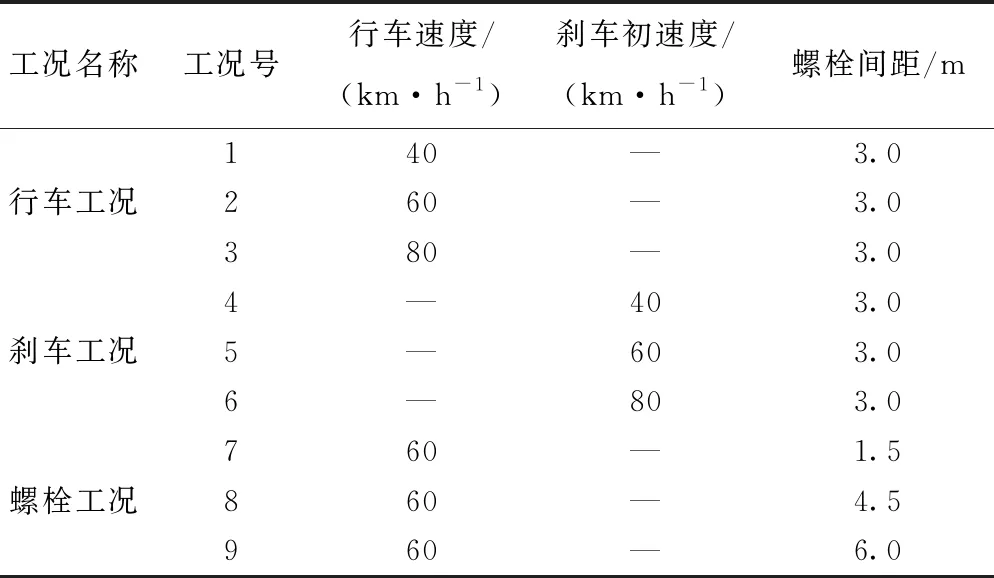
表3 动力响应分析的不同计算工况
3.1 车辆行驶速度影响分析
图7所示为不同车辆行驶速度下,导轨梁在梁端左侧截面(距左端点1.3 m)、1/4截面(距左端点22.3 m)、1/2截面(距左端点46.3 m)、3/4截面(距左端点70.3 m)和梁端右侧截面(距左端点94.3 m)五个位置处的最大Mises应力时程曲线。由图7可知,当车辆匀速通过导轨梁时,随着车辆行驶速度增加,导轨梁不同截面处的应力变化规律及应力峰值出现的位置均有差异。各工况下,导轨梁的Mises应力峰值分别为15.4、16.2 、15.1 MPa,工况1、工况2的Mises应力峰值分别为工况3的102%、107.3%。

图7 不同车辆行驶速度下导轨梁最大Mises应力
图8为车辆以不同速度行驶时,距左端点46.3 m处单侧螺栓的纵向剪力随时间的变化规律。由图8可知,随着车辆行驶速度增加,螺栓的纵向剪力峰值并非呈线性变化,当v=60 km/h时,螺栓纵向剪力峰值达到最大,与导轨梁的Mises应力变化趋势一致。三种工况下,螺栓的纵向剪力峰值分别为15.4、20.7、8.29 kN,呈现先增加后减小的趋势,工况1和工况2的螺栓纵向剪力峰值分别为工况3的185.8%和249.7%。车辆速度增加螺栓剪力反而减小的原因是当车辆速度增加到一定程度后,车辆在导轨梁上运行的时间减少,从而使得移动荷载产生的高频率振动不能及时发挥,导轨梁的振动频率偏小,因此,导轨梁传递给螺栓的纵向剪力就会减小,这与文献[10]和[19]中的动力响应计算结果类似。由此可见,当车辆行驶速度为80 km/h时对结构受力较为有利。

图8 不同车辆行驶速度下距左端点46.3 m处螺栓纵向剪力
3.2 刹车速度影响分析
将车头置于导轨梁1/2截面附近,使其沿着导轨梁纵向以不同初速度开始制动,导轨梁在距其左端点分别为1.3、22.3、46.3、70.3、94.3 m五个位置处的最大Mises应力时程曲线见图9。

图9 不同刹车初速度下导轨梁最大Mises应力
由图9可知,当车辆突然刹车时,导轨梁各截面处的Mises应力峰值随车辆初速度增加而增加。在工况4、5、6下,导轨梁的Mises应力峰值分别为4.7、6.7、7.09 MPa。对于导轨梁Mises应力峰值,工况4、工况5分别为工况6的66.3%、94.5%。
图10所示为车辆以不同初速度开始制动时,距导轨梁左端点46.3 m处螺栓的纵向剪力。由图10可知,螺栓的纵向剪力值随着车辆刹车初速度的增加有逐渐增大的趋势,工况4、工况5的螺栓纵向剪力峰值分别为工况6的73.8%、79.8%,表明车辆高速刹车制动状态为控制高强螺栓纵向抗剪承载力设计的最不利状态,同时可以看出,随着刹车初速度增加,螺栓纵向剪力峰值出现的时间越晚,这是由于刹车初速度越大,车辆在导轨梁上的制动距离越大,从而使车辆刹车所累积的不利影响逐渐增加,因此,应避免车辆在高速状态下刹车。

图10 不同刹车速度下导轨梁46.3 m处螺栓纵向剪力
3.3 螺栓间距影响分析
导轨梁上锚固螺栓的间距有1.5、3.0、4.5、6.0 m四种,在不同螺栓间距下,距离导轨梁左端点1.3、22.3、46.3、70.3 、94.3 m五个位置处的最大Mises应力时程曲线见图11。

图11 不同螺栓间距下导轨梁最大Mises应力
由图11可知,各工况下,导轨梁的Mises应力值峰值分别为16.7、15.1、22.7、21.5 MPa。当螺栓间距从1.5 m增加到3.0 m时,导轨梁的Mises应力峰值变化较小,但当螺栓间距从3.0 m增加到4.5 m时,导轨梁的Mises应力峰值变化较大,增加幅度约为50.3%,螺栓间距从4.5 m增加到6.0 m后,导轨梁的Mises应力峰值趋于平稳变化。
图12为不同螺栓间距下,距离导轨梁左端点46.3 m处螺栓的纵向剪力。由图12可知,各工况下,螺栓的纵向剪力峰值分别为8.37、8.29、12.60、12.00 kN。随着螺栓间距增加,螺栓纵向剪力峰值变化趋势与导轨梁Mises应力峰值保持一致,均呈阶梯式变化,螺栓间距从3.0 m增加到4.5 m时,螺栓纵向剪力峰值增加幅度为52%,在其余区间变化幅度较小,可见螺栓间距存在一个合理的取值区间,同时考虑工程经济性,螺栓间距取为3.0m比较合适。

图12 不同螺栓间距下导轨梁46.3 m处螺栓纵向剪力
4 结论
本文以某胶轮有轨电车-导轨梁耦合结构为研究对象,开展了不同工况下的结构动力响应分析,主要得出以下结论:
(1)基于LS-DYNA有限元软件建立的胶轮有轨电车-导轨梁耦合模型重力初始化过程合理,接触力稳定,能较好模拟轮轨接触下结构动力响应规律。
(2)导轨梁的Mises应力峰值和螺栓的纵向剪力峰值随车辆行驶速度的变化规律不明显;导轨梁的Mises应力峰值和螺栓的纵向剪力峰值随刹车初速度的提高逐渐增大,随螺栓间距增加呈阶梯式增长。
(3)结构设计时,螺栓间距的取值需综合考虑结构的安全性和经济性,本文螺栓间距建议取为3.0m;在实际运营中,应控制车辆行驶速度在80km/h左右,同时,避免车辆在高速状态下紧急刹车制动。