选矿智能摇床图像处理开发与应用
2023-02-13张文康王春景余龙舟袁林逊
张文康 刘 丹 杜 钰 王春景 余龙舟 袁林逊
(1.昆明理工大学a.国土资源工程学院;b.省部共建复杂有色金属资源清洁利用国家重点实验室;c.云南省战略金属矿产资源绿色分离与富集重点实验室;2.云南阿姆德电气工程有限公司;3.云南品视智能科技有限公司)
矿产资源是我国经济发展和军事领域不可或缺的重要基础资源[1]。 随着科学技术的不断进步,工业自动化、智能化成为未来不可阻挡的发展趋势, 我国大部分行业都在面临着产业升级,矿产行业也不可避免地面临产业结构的调整和设备升级等问题,在发展的大趋势下,只有紧跟时代的步伐,矿产行业才能为我国矿产资源需求提供强有力的支撑。
根据矿物的组成成分和矿物的性质,选矿方式主要分为重选、磁选、浮选和电选四大类。 摇床选矿是重选中重要的设备之一,在国内外得到了广泛的应用。 矿物以矿浆的形式在摇床床面上分选,主要是床条的型式、床面的不对称运动及床面上的横冲水综合作用的结果。 在床面呈现出精矿带、次精矿带、中矿带及尾矿带等多条扇形矿带分布,使不同品位的矿物得到分选[2,3]。
现如今摇床选矿技术已经很成熟,但选矿的自动化水平还相对较低, 在摇床选矿过程中,由于受到现场给矿量、给矿浓度、给矿粒度以及原矿品位的影响,会对床面矿物的矿带位置、矿带宽度和矿带颜色造成不同程度的影响,使矿带位置实时发生变化,而现场巡检的操作工人必须通过肉眼来观察床面矿带的特征变化,然后根据工作经验对接矿板的位置做出相应的调整,以达到对不同矿带分选的目的,从而达到选厂要求的精矿品位[4]。 这种传统调整接矿板的方式对接矿板位置调整频次较高, 巡检工人的劳动强度很大,选矿指标不稳定。
为了提高摇床在运行中的效率,提升摇床选矿的自动化水平,国内外各大高校和研究机构对摇床的结构、原理以及矿带的特点进行了分析研究[5]。但目前摇床选矿技术已经相当成熟,单从摇床本身入手来进行研究很难有新的突破。 而从摇床图像处理进行研究会是一个新的突破口,因为国内外对图像处理的研究已经相当成熟,并且在医学、人脸识别等方向得到了广泛的应用,但在选矿上的应用却很少[6]。图像处理的方法有很多。OTSU N提出的OTSU方法适用于执行自动图像阈值化, 在图像分割领域得到了广泛的应用[7]。BREJL M和SONKA M提出基于图像的灰度特征来计算一个或多个灰度阈值图像分割方法[8];MEYER F和BEUCHER S提出一种基于拓扑理论的数学形态学的分水岭分割方法[9];ADAMS R和BISCHOF L提出一种既适用于灰度图像分割也适用于纹理图像分割的种子区域生长法[10];和丽芳等提出一种基于磷虾优化算法的摇床矿带分带图像分割法[11]和基于改进萤火虫算法的多阈值摇床彩色矿带分带图像分割法[12];杨文龙等设计了一种选矿摇床矿带识别及接矿板自动调节装置[13];日本SMM公司提出了一种利用最小二乘法获得摇床分割带中心矢量的方法[14]。 然而,深度学习方法旨在独立学习这些特定领域的高级特征,而不需要领域知识和特征的手动提取。 基于各种算法基础之上的智能摇床选矿图像处理研究成果大多是理论性介绍,工业应用方面的相关文献是少之又少。
目前智能化发展是传统行业的发展趋势,选矿行业也不例外。 选矿行业大多数岗位都是靠人力来进行判断和操作,企业承担的人力成本逐年增加, 选矿各项指标也不能做到相应程度的提高, 因此需要科技创新和智能化来提升效率、降低成本。 将摇床选矿与人工智能相结合,设计并开发一套能够替代人工的摇床智能设备很有必要,对于促进选矿装备领域的智能化意义深远。
1 在线设备的开发
由于摇床选矿是一个持续不断的工作过程,要对床面进行实时数据监测,最好的方法就是在每台摇床上方安装一台监控摄像机,这样不仅代替了人工巡检,还能实现床面的实时监控和画面传输。
1.1 选矿摇床
选矿摇床是在一个倾斜宽阔的床面上,借助床面的不对称往复运动和薄层斜面水流作用进行矿石分选的设备。 目前在用的摇床基本都是由床面、机架和传动机构3大部分组成[15],其结构如图1、2所示。 床面呈梯形,床面横向有一点倾角,倾角小于10°,一般情况下在0.5~5°;床头纵向有细微的上倾,倾角为1~2°,但一般情况是0°。 床面有粗、细砂刻槽面、漆灰刻槽床面和玻璃钢床面,但一般都是玻璃钢床面,耐用、耐腐蚀。 在床面纵向布置若干床条,床条高度由床头向床尾方向逐渐变低。 整个床面由机架支撑,机架安装调坡装置,可根据需要调整床面的横向倾角。 床面纵向给料槽一端配备有传动装置,由传动装置带动床面做往复差动摇动。

图1 摇床侧视图
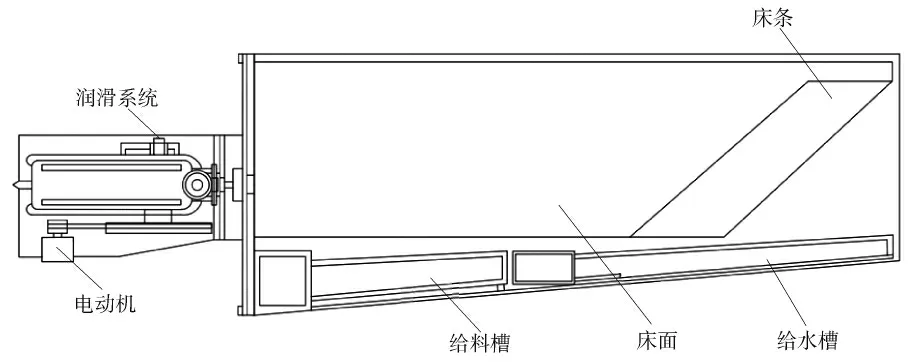
图2 摇床俯视图
矿物以矿浆的形式在摇床床面上分选,主要是床条的型式、床面的不对称运动和床面上的横冲水3个因素综合作用的结果。 首先,床条在床面上激烈摇动时,加强了斜面水流扰动作用,增强了旋涡,由此产生的水流垂直分速对物料的悬浮作用使物料悬浮并按密度和粒度进行分层。
1.2 监控系统设备
摇床实时监控设备主要由电控柜、 摄像机、丝竿盒、人机交互触摸屏和摄像机支架组成。
电控柜主要作为现场部件摆放并进行人机交互设定,内部主要设备有开关电源、串口步进/伺服控制器和4G网关。 4G网关主要用来远程运行、维护和监控。 网关在网络层以上实现网络互连,是复杂的网络互连设备,仅用于两个高层协议不同的网络互连。 网关既可以用于广域网互连,也可以用于局域网互连[16]。
人机交互触摸屏的主要作用是根据选矿情况和各项指标要求来调整各项参数,比如精矿品位、回收率及损失量等。
丝竿盒的主要作用是驱动电机带动接矿板时进行位置调整、角度调整和高度调整。 在丝竿盒两端各安装一个限位部件,防止电机驱动过多造成设备损坏。 电机带动接矿板左右移动速度适中,运动平稳,电机驱动带动的接矿板选用易于矿物滑落的材料,防止矿物堵塞。
摄像机支架用来固定摄像机,以方便调整摄像机的安装高度和安装角度,确保能够采集到摇床的高清画面, 确保传输给系统的图片质量,保证系统计算效率,进一步减少系统的计算量。 智能摇床设备现场画面如图3所示。

图3 智能摇床设备现场画面
2 软件开发
图像处理软件是整套摇床监测控制系统的核心所在, 主要是对现场传回来的图片进行处理, 负责对摇床床面矿带信息 (如矿带带宽、颜色、位置分布等)进行提取并分析,软件对床面矿带图像的处理精度直接影响接矿板位置的精准度。 因为摇床在正常工作过程中一直处于循环往复的颠簸运动,摇床床面振幅约为16 mm,摄像机安装在摇床上方, 但是摄像机是固定不动的,这样就会导致即使矿带没有发生变化,但是床面是一直在往复运动,摄像机提取出的矿带边界照片的位置也会有相应的变化,给监测结果造成一定的误差。
针对摄像机不能和床面相对静止的问题,利用机器学习的方法来进行解决。基于训练数据,开发了机器学习算法, 该算法将学习的信息应用于看不见的数据,以做出预测或其他类型的决策。前期先对床面进行矿带数据采集、 模型搭建和初始化。对采集到的床面矿带信息进行特征标定,然后对这些数据进行模型训练与评估, 得出目标检测模型,最后放到软件中枢平台进行使用。
软件中枢平台根据模型训练数据对传输到平台的摄像机现场床面矿带进行对比和识别,输出识别图像,并标定识别点,然后发出相应的指令对接矿板位置进行调整。
系统逻辑框架如图4所示。
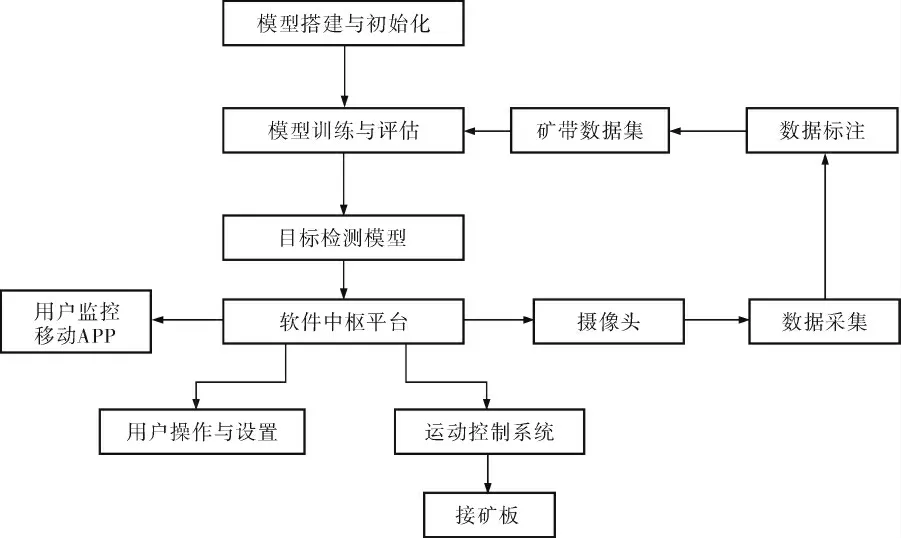
图4 系统逻辑框架
算法流程具体如下:
a. 现场摄像机收到指令后会进行实时摇床床面矿带数据采集,将采集到的图像通过4G网关传输到软件中枢平台,然后对传来的床面矿带图像进行相应的算法处理,使传输回来的床面矿带图像更加清晰。
b. 经过算法处理过的图片传输到提前训练好的模型,模型对图片信息进行评估,然后输出系统标定后的图片,算法计算之后如果矿带相对上一轮有变化,则算法经过精确计算会给出移动方向和移动距离,移动距离精确到毫米,软件中枢平台就会向运动控制系统发出指令,运动控制系统驱动电机带动接矿板移动到指定位置。 经过对现场选矿情况和矿带变化频率的了解,系统软件中枢平台设定每3 min摄像机对现场摇床床面矿带画面采集一次,算法计算一次,矿带相对上一轮如有变化,软件中枢平台就会发出相应的指令,然后对接矿板进行调整。
3 工业选厂试验
在云南云锡大屯锡矿矿物加工中心实施智能摇床应用研究,车间氧化矿日处理量2 000 t,摇床200多张;硫化矿日处理量4 000 t,摇床288张。由于摇床数量多,矿带变化快,需要大量的巡检工人不断巡检来调整接矿板的位置,以达到选厂需要的指标,这样大幅增加了巡检工人的劳动强度和企业运行成本。
工业试验地点选在大屯云锡硫化矿工段,以3栋一段3-18摇床作为试验摇床, 选用220 V电源对该套设备进行供电,将摄像机安装在摇床尾部的上方,安装高度为2 m,实时采集摇床床面画面并进行图像传输和处理,然后驱动电机带动接矿板移动到目标位置,实现3-18摇床全自动接矿。
3.1 实时监控频率
根据现场矿带变化情况,将系统每次计算时间间隔设定为3 min, 即每间隔3 min摄像机自动采集实时画面传输给软件中枢平台,然后经过计算对接矿板位置做出调整,以达到接矿要求。
3.2 矿带图像处理
因为所选的摇床是硫化矿粗选工段的摇床,所以根据现场要求只需将次精矿和中矿进行分离。 次精矿矿带和中矿矿带颜色上有很大的区别,中矿矿带颜色发白,次精矿矿带颜色发黑。 对前期采集的上万张图片进行特征标定,每张图片中矿和次精矿中间标定4个点, 然后进行模型训练,现根据设定对现场摇床进行图像采集,将图像进行简单处理输入给模型,输出特征图片如图5所示。

图5 次精矿矿带和中矿矿带分割图
从输出图像可以看出,次精矿矿带和中矿矿带中间有4个明显的分割点,分割效果几乎完美,图像分割精度能够达到要求。
3.3 选矿指标对比
为了对比智能摇床设备和人工操作情况下选矿指标的差异,试验选取粗选作业工段两张相邻摇床,3-17摇床为人工操作摇床,3-18为智能设备安装摇床, 两台摇床由同一台棒磨机给矿,原矿品位相同,给矿粒度相同,矿浆浓度相同。 保证所有条件相同的情况下,进行3天工业试验采样,每次采样间隔1 h,采样13组。试验对比结果如图6所示。
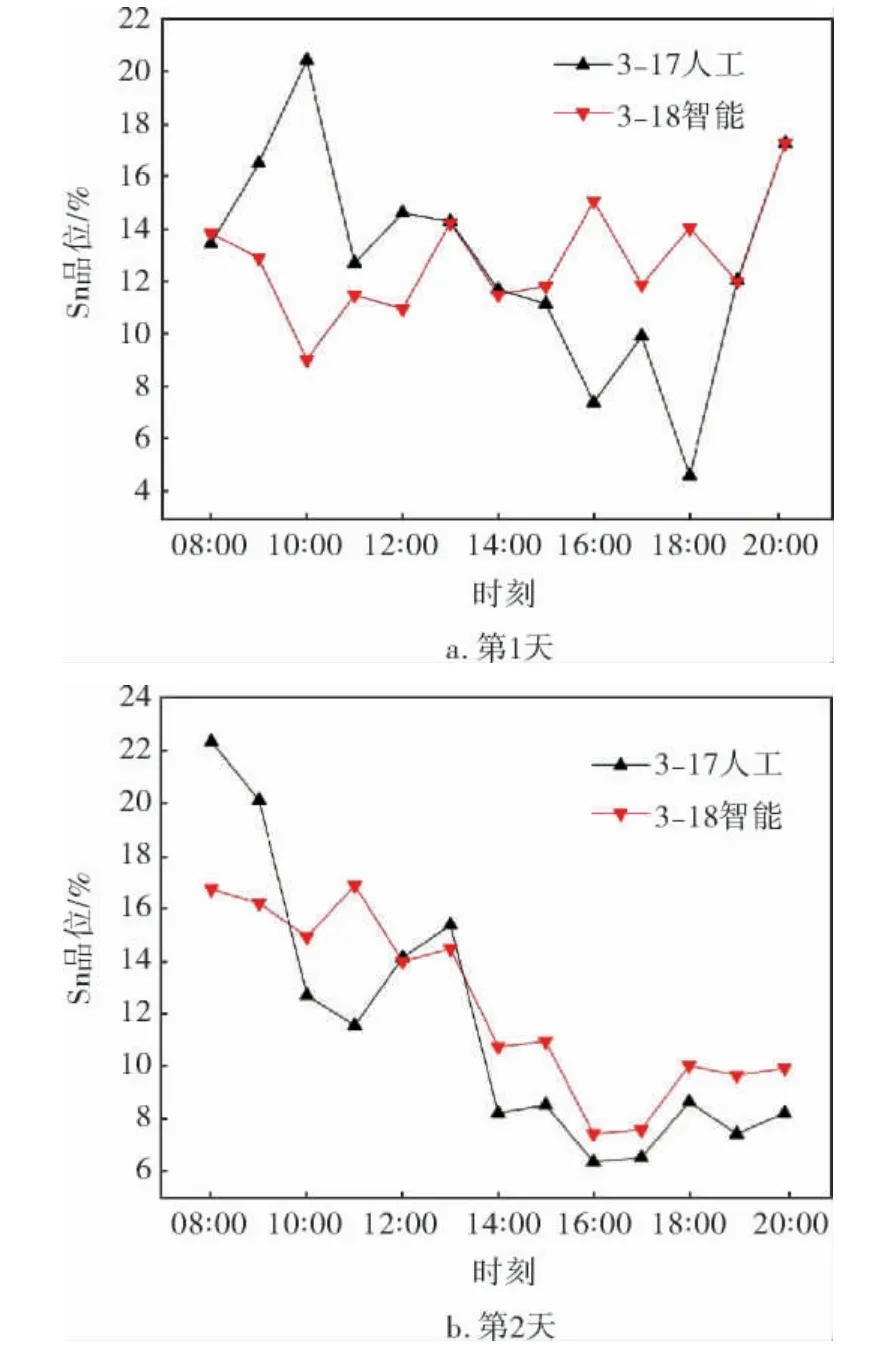

图6 人工与智能接矿品位对比
通过3天的接矿Sn品位折线图可以看出:
a. 智能接矿Sn品位波动幅度相对人工接矿小得多,第1天的数据波动相差最为明显;
b.智能接矿Sn品位比人工接矿Sn品位稳定;
c.智能接矿Sn品位比人工接矿Sn品位高。
为了进一步证明智能接矿的优势,采用平均值和方差对3天的采样数据进行计算, 对比结果见表1。

表1 人工与智能接矿数据平均值和方差的计算结果对比
通过表1可以看出:
a. 平均值计算结果第1天相等, 第2天和第3天均是智能接矿大于人工接矿;
b. 方差计算结果均为智能接矿小于人工接矿。
从计算结果可以看出智能接矿相对人工接矿品位更高且更稳定。
4 结论
4.1 在云南云锡大屯锡矿矿物加工中心硫化矿粗选工段实施智能摇床应用的工业试验研究,智能摇床自动调节接矿板接到的精矿品位能够达到工艺要求。
4.2 摇床智能监控设备能够替代人工, 实时监控摇床床面矿带变化情况并进行数据传输,实现无人值守模式。 通过机器学习精确识别矿带分界点,识别精度满足使用要求。
4.3 智能摇床选矿系统的工业应用能够将人工劳动力解放出来,提高摇床选矿的生产水平和企业效益,对重选设备的发展具有强有力的推动作用。
