磁悬浮电机断电重启控制策略研究
2023-02-13郭伟林陈栋建张良浩
郭伟林,陈栋建,张良浩
(1.珠海格力电器股份有限公司,珠海 519070; 2.广东省高速节能电机系统企业重点实验室,珠海 519070)
0 引 言
采用磁悬浮电机的制冷系统广泛应用于数据中心制冷等不间断运行场合,在此方面的应用领域对电机控制系统实现断电恢复快速重启提出更高的要求。而磁悬浮电机控制系统出现异常断电,在电机未停转状态下需要电机能量回馈维持磁轴悬浮稳定,避免磁轴掉落磨损。如何保证磁悬浮电机可靠性的同时实现快速重启具有重要的研究应用意义。
目前国内外主要有两类方法进行断电恢复快速重启:一类是令电机制动零速重启,该方式在电机高速惰转情况下制动时间较长,无法满足高速状态下的电机快速重启要求,适用于低速状态下的快速重启;另一类是观测转子位置转速信息实现带速重启。文献[1-2]提出采用零电压矢量注入法,该方法多次注入零电压矢量,根据三相短路电流计算转子角度及电机转速。该方法位置观测的精度受限于反动电动势大小以及电流传感器精度,因此无法满足全速域的位置观测。文献[3-4]提出使用高频方波注入法,该方法在电机端注入高频振脉电压,根据其响应电流高频分量获取转子位置信息,从而实现带速重启。但高频注入法计算转子角度的误差受反电动势影响,不适用于中高转速下的带速重启。文献[5]结合上述两种方法,通过使用三相短路测试脉冲判断当前转速,根据转速状态选择高频注入法或零电压矢量注入法。两者的结合能够做到全速域位置观测并完成带速重启,但三相短路测试脉冲易引起的电流难以控制,难以保证控制系统的可靠性。上述方法在断电时间内没有进行能量回馈控制,无法为磁悬浮轴承控制器持续供电,因此无法满足大功率磁悬浮电机控制系统的安全可靠性。
为确保电机控制系统的安全可靠性以及满足快速重启功能需求,本文提出在短时断电场合中根据电机惰转高低速状态将电机制动零速重启与带速重启结合使用的控制方式。电机控制系统在高速状态断电时进行电压电流双闭环的SVPWM整流调控能量回馈,保证磁悬浮轴承控制能源供应,同时从响应的电机电流中获取转子位置转速信息,做到带速重启。电机控制系统在低速状态断电则进行在逆变器中基于Boost等效电路下的升压式能量回馈快速制动,即增大能量回馈母线电压调制幅值,使电机快速制动然后零速重启。本文策略始终以可控电压能量回馈方式实现全速域下的断电快速重启,充分保证了磁悬浮轴承的能源供应,避免磁悬浮轴承失电磨损。同时磁悬浮电机快速重启的实现令制冷系统在不间断运行应用场合中能够在短时断电后快速恢复运行,避免冷却温度因长时间停机出现大幅回升,降低了经济效益损失。
1 磁悬浮电机控制系统
1.1 磁悬浮永磁同步电机控制系统结构
磁悬浮电机控制电路拓扑结构如图1所示,通过AC-DC-AC变频器对电机进行速度控制。变频器整流部分采用二极管不控整流;直流部分为储能电容与制动电阻并联构成,并对磁悬浮轴承控制器供电;逆变部分为三相两电平IGBT逆变结构。
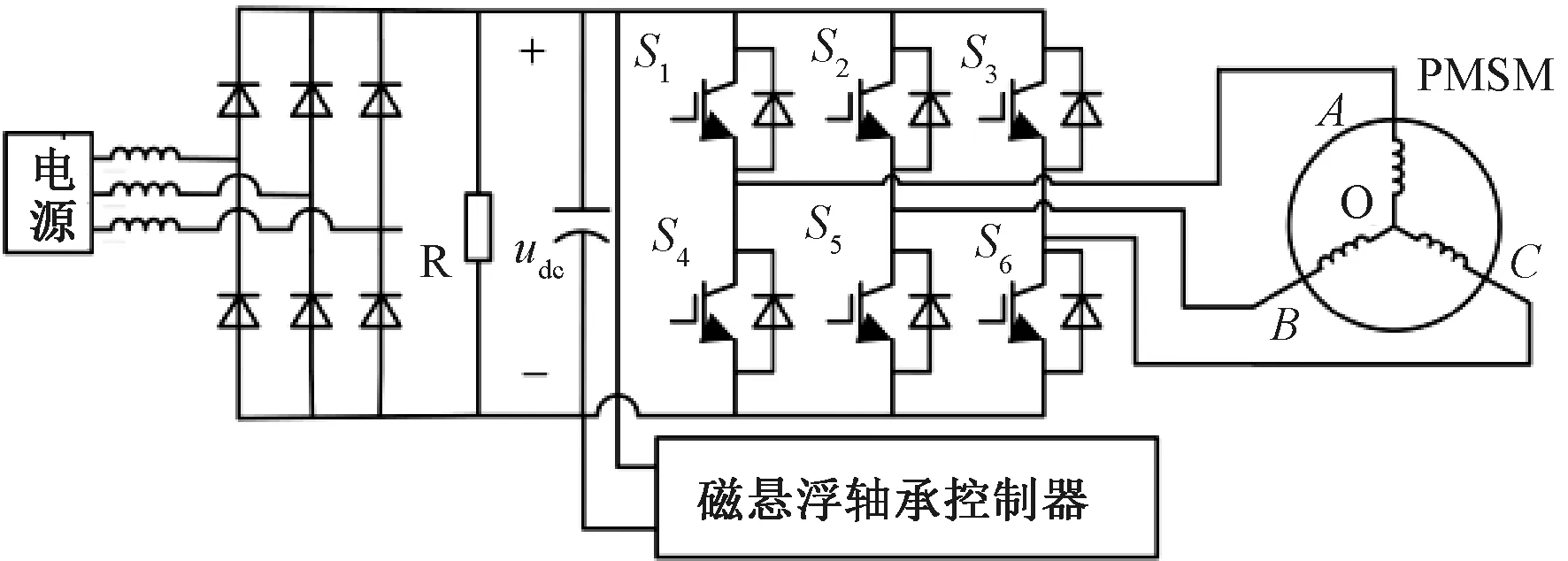
图1 磁悬浮电机控制结构框图
1.2 FOC磁场定向控制
本文磁悬浮电机控制系统采用励磁电流idref=0的无位置传感器磁场定向矢量控制,该控制算法通过坐标变换对同步旋转坐标系下d、q轴电流解耦调控。控制结构如图2所示,其中包含了电流环和转速环双闭环控制。转速环作为外环将参考转速与反馈转速作PI计算获得转矩电流参考值iqref。电流环作为内环将转矩电流参考值与电机三相电流反馈值作PI运算获得当前励磁控制量ud和转矩控制量uq。两个控制量进行Park逆变换后进行SVPWM计算获得控制三相逆变器的振幅脉冲,实现了电机速度控制。
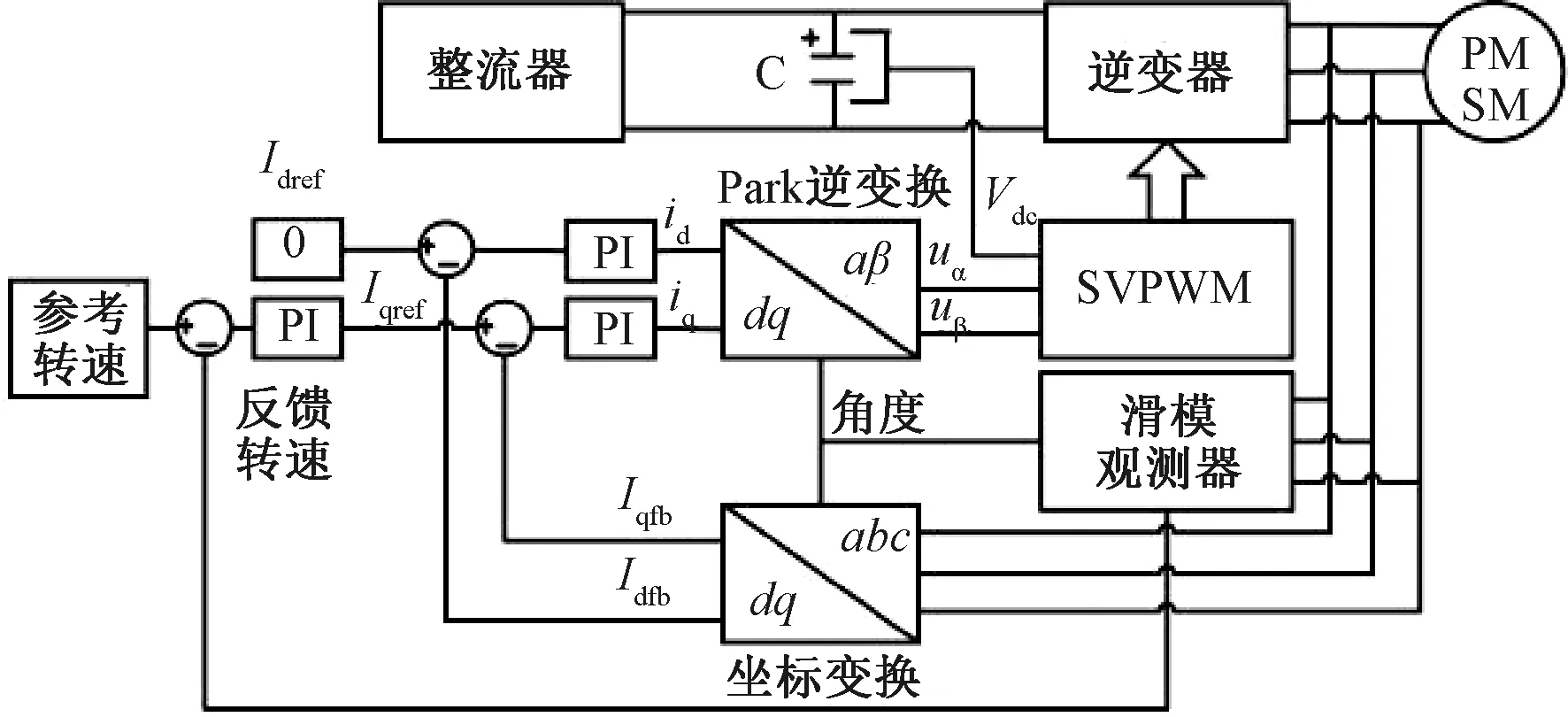
图2 FOC矢量控制结构图
2 断电恢复快速重启策略
2.1 高速惰转带速重启
实现电机带速重启需要具备的条件是获得当前状态下转子精确的位置与转速信息。本文提出在电机高速状态断电后进行电压电流双闭环SVPWM整流调控电机惰转反电动势能量回馈母线电容,同时从电机响应电流中获取转子信息。其中转子信息的获取采用滑模观测法,该法是基于观测电流与实际电流之间的误差来设计滑模观测器,并由电流的误差来重构电机的反电动势、估算转子位置与速度。其中反电动势能量回馈调控的本质是为电压型三相AC/DC整流过程。逆变器回馈反电动势能量的等效三相整流电路如图3所示,图3中Ea~c为三相反电动势,La~b为三相电感,Ra~c为三相等效电阻,V1~V6位IGBT功率器件,D1~D6为续流二极管,udc为母线电压,R为制动电阻。
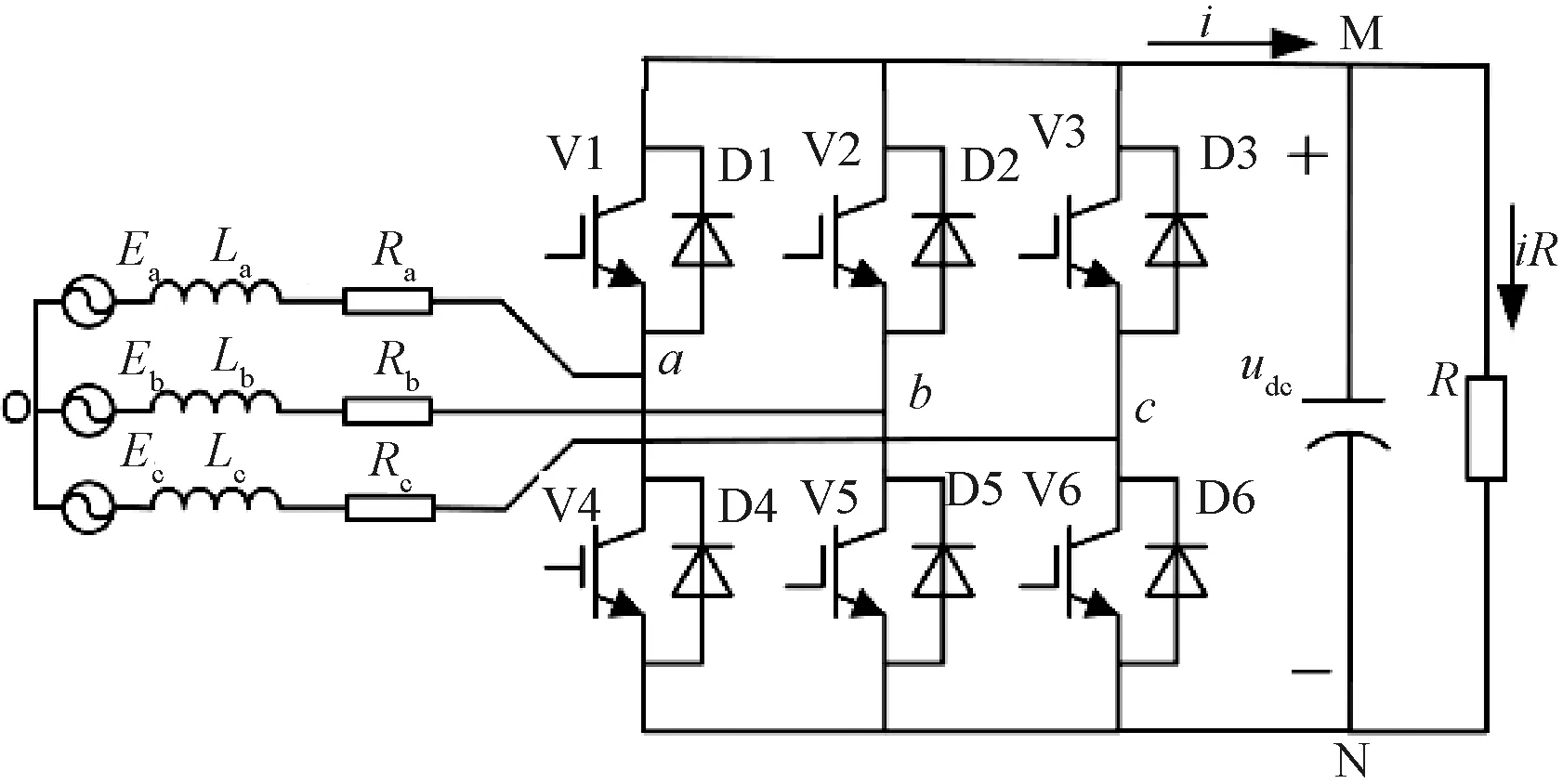
图3 三相整流等效电路
定义开关函数:
(1)
式中:k分别代表a,b,c各相。
通过图3三相整流等效电路,可以列出三相回路的电压方程:
(2)
式中:ia,ib,ic分别为三相电流;uaN,ubN,ucN分别为a~c点与N点间电压;uNO为N点与O点间电压。
在图3的三相回路中,当Sk=1,即上桥臂导通,下桥臂关断时,ukN=udc;当Sk=0时,即上桥臂关断,下桥臂导通时,ukN=0,因此可得:
ukN=Skudc
(3)
将式(3)代入三相电压方程式(2)中可得:
(4)
在电机三相星型连接回路中有:
(5)
式(5)代入式(4)后三式相加可得:
(6)
式(6)代入式(4)可得:
(7)
由基尔霍夫电流定律获得图3中节点M的电流方程:
(8)
根据功率器件IGBT导通状态,例如当Sa=1,Sb=0,Sc=0时,i=ia,可得:
i=Saia+Sbib+Scic
(9)
将式(9)代入式(8)可得:
(10)
由以上电压电流方程可知,通过控制逆变器的三相逻辑开关,可以调控三相响应电流,进而调控电机能量回馈到母线电容的电压幅值。
在FOC磁场定向矢量控制中采用dq轴解耦控制,为了降低控制系统的复杂性,三相整流能量回馈控制也沿用dq轴解耦控制。因此将三相整流电压方程变换至同步旋转坐标系下可得:
(11)
三相整流电流方程变换至同步旋转坐标系下可得:
(12)
由同步旋转坐标系下的电压电流方程设计电压电流双闭环的整流控制策略,如图4所示。以母线电压调节作为外环,以电机三相电流调节作为内环,实现电流调控回馈电压幅值。

图4 电压电流双闭环整流控制框图
在同步旋转坐标系中,令控制矢量V的q轴分量完全重合反电动势电压矢量以及令d轴分量为0,合成控制矢量如图5所示。
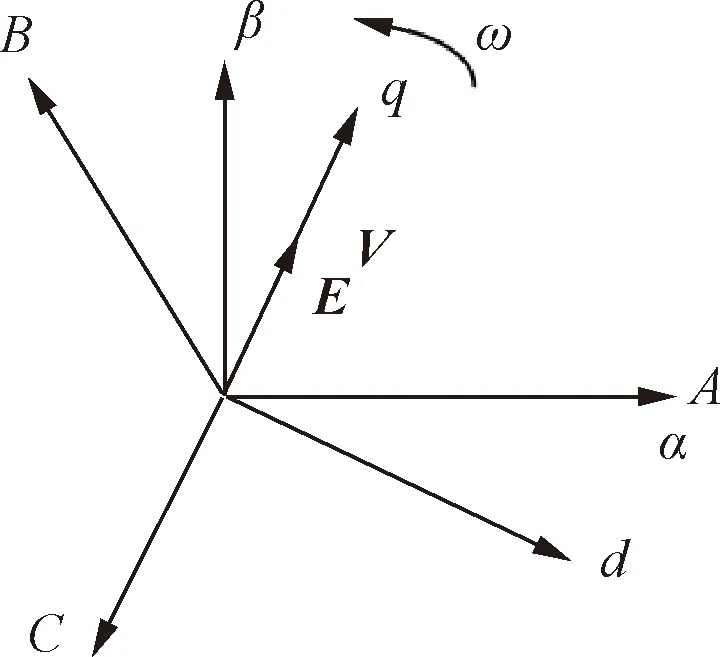
图5 合成矢量
由图5可以看出控制矢量V追踪反电动势电压矢量E直至完全重合,此时的控制矢量V与反电动势合成矢量E同相位同转速旋转,三相响应电流中则包含了转子的位置与转速信息。由此观测三相电流可获取转子的位置以及转速,从而具备了电机带速重启条件,当断电恢复后切换回转速电流双闭环控制时即可实现平稳电机重启。
2.2 低速惰转制动重启
低速状态下转子信息观测相对模糊,不利于带速重启,所以电机处于低速惰转状态则进行电压单闭环调控的能量回馈,通过抬升电压调制幅值实现电机快速制动效果,进而实现电机零速重启。该方法中的能量回馈实质为在逆变器构成的Boost等效电路中采用下桥臂调控方式进行回馈。
如图6所示,电路中电机电感以及功率开关V4、V5、V6构成升压Boost电路。当V4、V5、V6导通时,电机内部绕组电感电阻形成回路,绕组线圈不断切割磁场产生反电动势在电感L中蓄能;当V4、V5、V6关断,U相反电动势电压大于母线电压时,反电动势给母线电容充电。

图6 Boost等效电路
该能量回馈控制策略如图7所示,采用电压环单闭环PI调控方式。母线电压参考值与反馈值作差PI计算获得调控量,该调控量经过数学计算后与三角载波比较后获得开关脉冲PWM。该PWM同时作用于逆变器下桥臂,实现AC/DC整流能量回馈。该法无需依赖电机转子位置来选择控制开关管,电机处于低速状态时也可以高效可靠地实现升压式的能量回馈。该过程中加大母线电压调控幅值则加大了制动电阻的损耗功率,加快了电机惰转反电动势能量的损耗;同时电机绕组电感储能的提升,起到电机快速制动效果,从而实现电机制动零速重启。

图7 Boost电路整流能量回馈调控框图
2.3 断电恢复快速重启控制流程
磁悬浮电机控制系统断电快速重启控制流程框图如图8所示。电机运行频率高于50 Hz状态下断电,变频器进行电压电流双闭环SVPWM整流能量回馈,在调控过程中通过观测电流获得转子的位置与转速信息,在变频器完成重新上电后切回转速电流双闭环控制进而实现带速重启。电机运行频率小于50 Hz状态下断电则进行升压式能量回馈快速制动,实现零速重启。
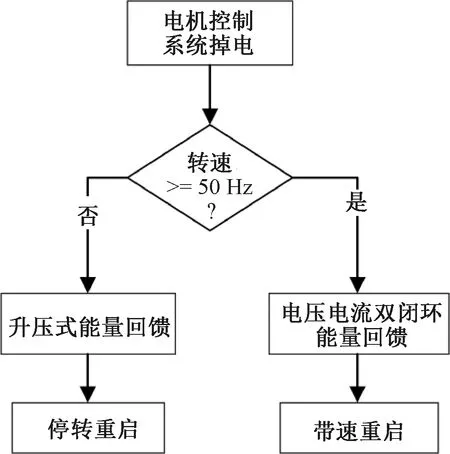
图8 断电恢复电机快速重启控制流程框图
3 Simulink仿真与电机实验
3.1 带速重启Simulink仿真
3.1.1 仿真搭建
根据基于电压电流双闭环SVPWM整流能量回馈调控的带速重启策略,在Simulink中搭建仿真模型,如图9所示。该仿真在电机SVPWM控制模块的基础上添加转速电流双闭环与电压电流双闭环间相互切换,以此仿真实现电机带速重启功能。
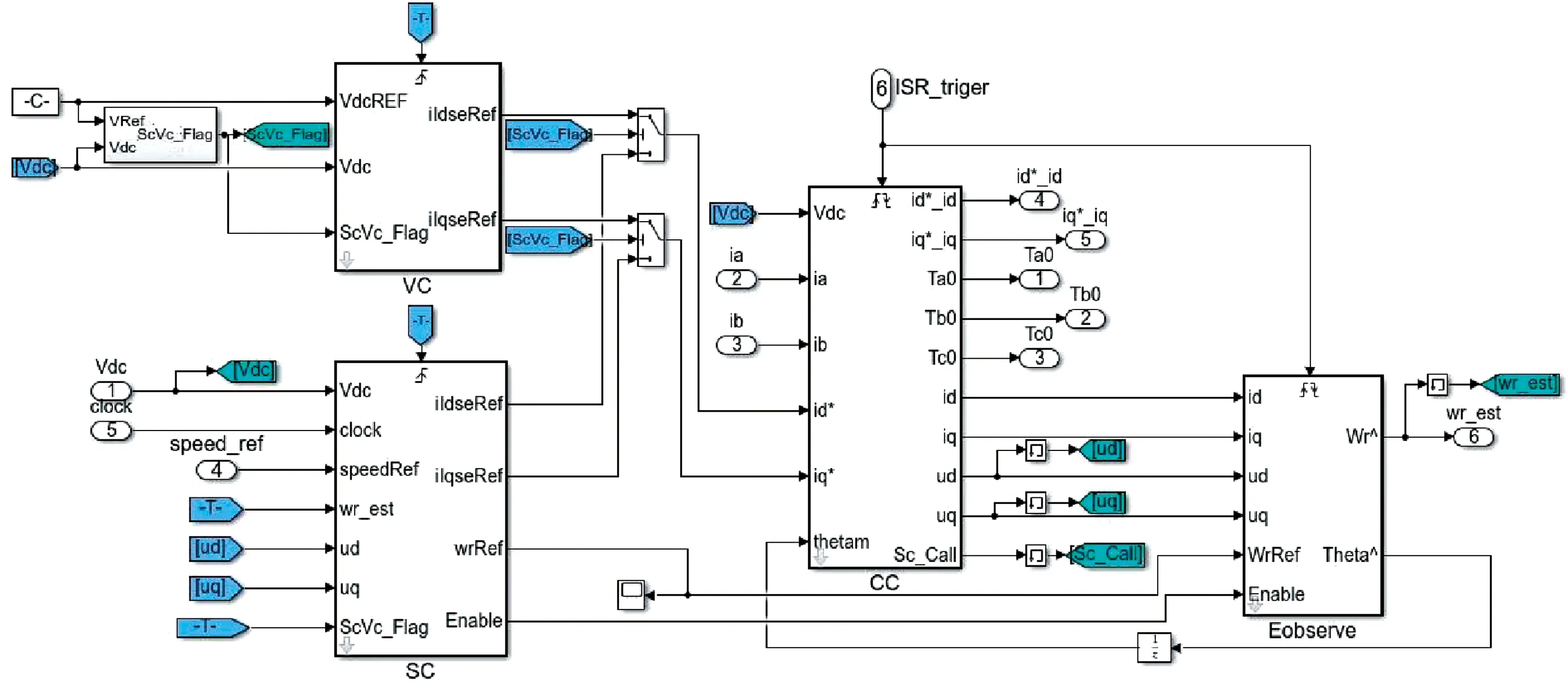
图9 带速重启仿真模型
3.1.2 仿真结果
在该仿真中电机控制系统运行在高频率状态,在7 s时刻断电,同时控制系统由速度电流双闭环控制切换至电压电流双闭环整流能量回馈控制。仿真结果如图10所示,断电后能量回馈令母线电压维持在460 V,此时电机电流稳定可控。该仿真在8 s时刻电源恢复,电机控制系统根据获得的转子角度与位置平稳切回转速电流双闭环控制,做到了断电恢复后0.56 s内完成带速重启,且启动电流平稳可控。

图10 仿真结果波形
3.2 断电快速重启电机实验
3.2.1 电机正常停机惰转时间测试
电机稳定运行高速状态下断电恢复,电机以额定电压能量回馈控制进入正常惰转状态。测量电机反电动势波形如图11所示,由该波形可知电机正常惰转时间约为83 s。
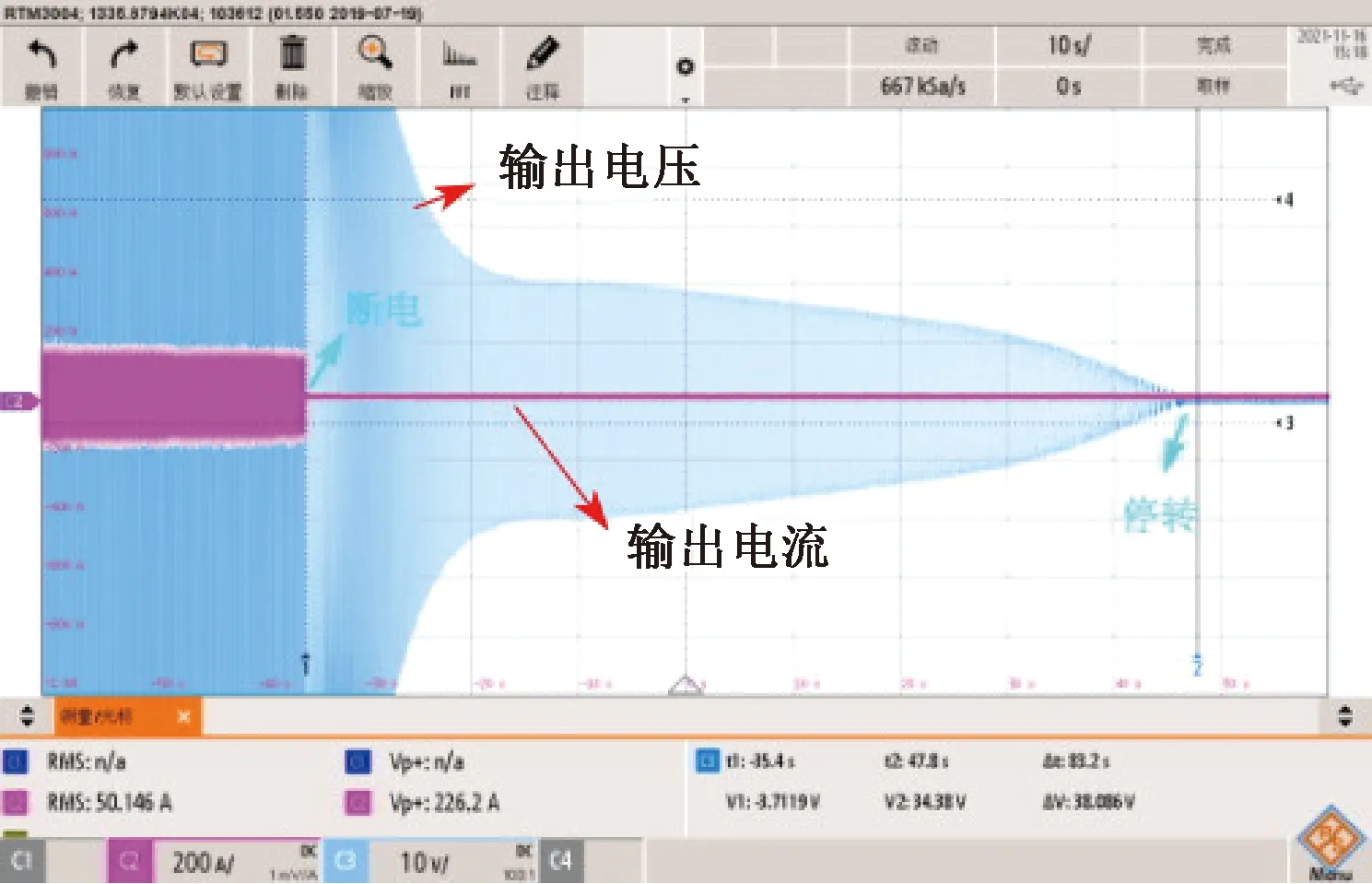
图11 电机惰转反电动势波形
3.2.2 高速惰转带速重启实验
该实验磁悬浮电机控制系统稳定运行436 Hz状态下断电恢复,同时进行电压电流双闭环整流能量回馈控制,观测电流获取转子的位置与转速信息,实验波形如图12所示。该过程中,在断电后母线电压能够稳定维持在460 V,磁悬浮轴承控制能源供应正常;电源恢复后1.55 s时间内完成了电机带速重启,电机速度得到了平稳控制,且电机电流控制在安全范围内,满足了控制系统的安全可靠性以及断电快速重启需求。

图12 带速重启波形
3.2.3 低速惰转制动零速重启实验
该实验磁悬浮电机系统在电机低速断电状态下进行能量回馈升压式控制,实现电机制动后零速重启,实验波形如图13所示。实验在断电后母线回馈电压从额定的460 V抬升到670 V,电机快速制动效果十分显著。在断电恢复后19 s内完成了电机制动,实现了零速重启;同时母线电压460 V提升至670 V能够兼容维持磁悬浮轴承控制器供电。
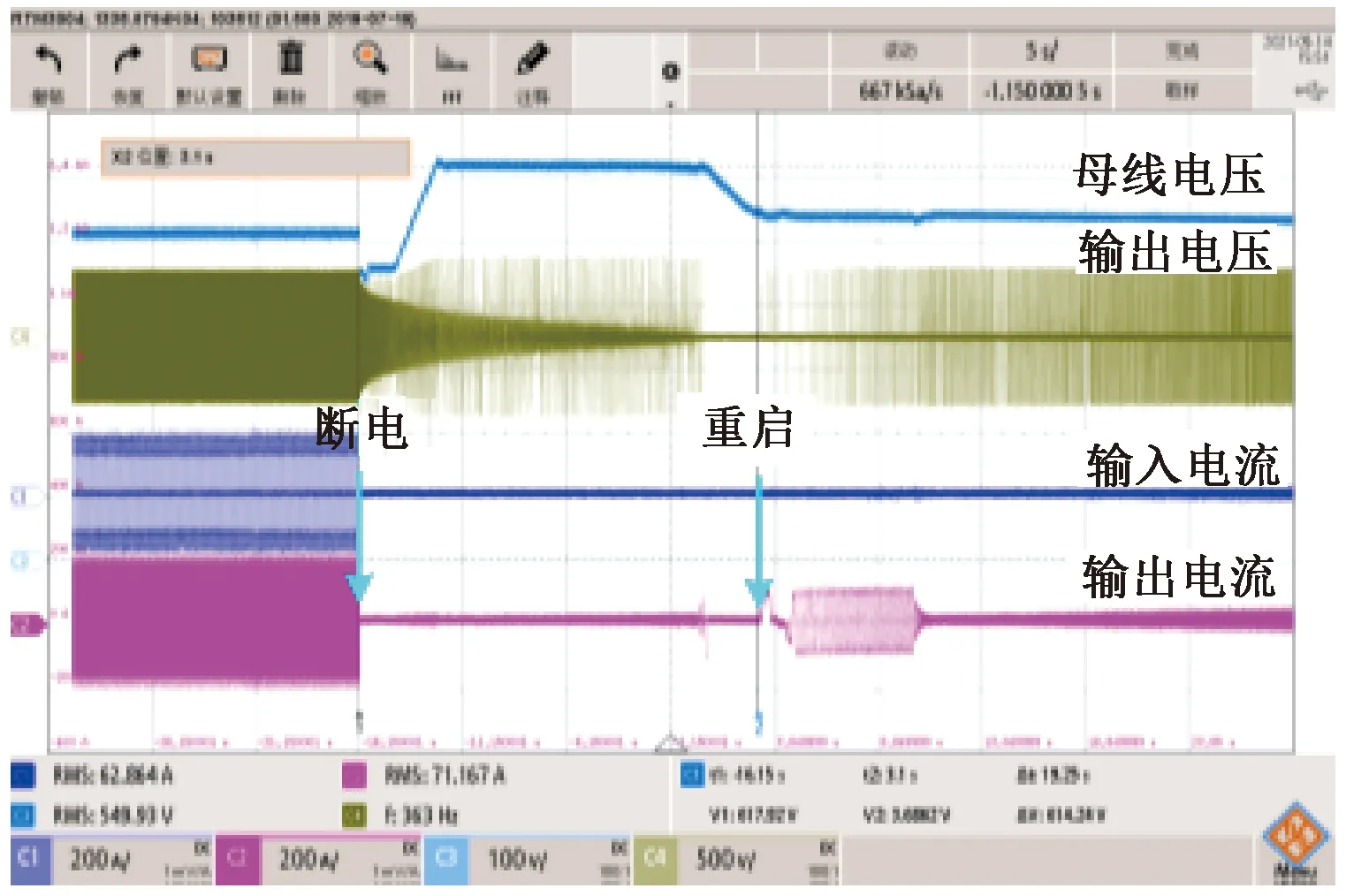
图13 快速制动零速重启波形
4 结 语
本文在磁悬浮电机控制系统运用在短时断电场合中,提出一种新型的断电恢复快速重启策略。该策略在电机高速状态断电后进行电压电流双闭环的SVPWM整流调控电机能量回馈,通过观测电流获取转子信息进行带速重启;在电机低速状态断电后进行升压式能量回馈制动电机零速重启。仿真与实验证明本文策略在断电快速重启中的安全性与高效性。相对于零矢量注入法的三相短接响应电流的不可控性,该策略的带速重启的电机电流始终处于电流环闭环调控之中。低速下采用的升压快速制动零速重启,取代在转子转速与位置信息模糊不清的状态下带速重启,降低电机重启失败率。
本文策略实现了电机惰转能量回馈控制,维持了磁悬浮轴承控制器持续供电,保证了控制系统的安全可靠性。相对于电机正常惰转至停转的零速重启常规方法,本文策略实现了在电机中高转速状态下2.35 s内完成断电恢复带速重启;在电机低速状态下断电恢复零速重启时间从83 s缩短至19 s。磁悬浮电机控制系统断电重启时间得到了极大的缩短,满足了不间断运行场合对快速重启功能需求。
