基于北斗系统的船载USB轴系参数标校方法
2023-02-13田英国许国伟顾新锋周海渊
田英国,许国伟,顾新锋,刘 洋,周海渊
(中国卫星海上测控部,江苏 江阴 214431)
S频段统一测控系统(简称USB)是航天测量船最为重要的测控设备。为确保在各类测量中的测量精度,必须适时对USB设备进行标校[1]。USB设备标校包括标定和校准2个过程,标定主要是指获取USB设备跟踪相位、定向灵敏度和轴系误差参数的过程;校准主要是指调整设备跟踪相位、定向灵敏度和轴系误差参数等的过程,主要讨论USB轴系误差参数标定和校准问题。
目前,传统USB轴系参数标校以光轴为中间量实现机械轴和电轴之间的转换。光轴是机械轴的中介,而机械轴又是USB天线的几何轴心,理论上该标校方法能够满足USB标校的需求[2-4]。但是在实际使用中,发现该方法操作难度大,容易受天气等因素的影响,而且光学设备本身的精度及其安装稳定度也会影响USB设备标校结果。近几年,杨磊等[5]提出采用跟踪精轨目标进行直接标校电轴参数的方法得到了成功应用,但是目前跟踪精轨目标主要以跟踪标校星为主,受限于标校星数量少、轨道回归周期长和单次跟踪角度覆盖性较差,需多天跟踪才能完成一次标校。同时获取事后精轨周期长,导致标校时效性差,人力物力资源消耗多且引入环境变化误差较多。目前,北斗卫星资源较多且分布均匀,包含有不同轨道周期的卫星,合理设计USB跟踪北斗卫星方案,充分利用北斗卫星资源,进而提高USB轴系参数标校的效率,具有重要的研究价值[6-7]。
1 基于北斗系统的船载USB轴系参数标校方法
1.1 北斗卫星轨道计算方法
为避免小倾角带来的轨道拟合奇异现象,北斗GEO卫星采用了中间轨道法拟合广播星历参数,即计算GEO卫星位置时需旋转5°[8]。下面分别给出MEO/IGSO和GEO卫星位置计算方法。
计算历元升交点的经度(地固系)为
(1)

计算MEO/IGSO卫星在CGS2000坐标系中的坐标为
(2)
式中:xk、yk为卫星在轨道平面内的坐标;ik为改正后的轨道倾角;Xk、Yk、Zk为卫星在CGS2000坐标系中的坐标。
计算历元升交点的经度(惯性系)为
(3)
计算GEO卫星在自定义惯性系中的坐标为
(4)
式中:XK、YK、ZK为GEO卫星在自定义惯性系中的坐标。
计算GEO卫星在北斗坐标系中的坐标为
(5)
式中:XGK、YGK、ZGK为GEO卫星在北斗坐标系中的坐标;RX(φ)、RZ(φ)分别为
1.2 观测方程
USB测角数据轴系误差修正模型为
Ac=A+A0+βmsin(A-Am)tanE+
δmtanE+(Sb+Cs+ΔAZ)secE
Ec=E+E0+βmsin(A-Am)+
ΔEgcosE+(Ce+ΔEZ)
(6)
式中:A和E分别为实测方位角和俯仰角;A0为方位零位;E0为俯仰零位;βm为大盘不水平;Am为大盘最大倾斜方位;δm为俯仰、方位不正交;Sb为俯仰光轴不正交;Cs为方位光电偏差;Ce为俯仰光电偏差;ΔEg为重力下垂;ΔAZ、ΔEZ分别为方位、俯仰动态滞后;Ac、Ec分别为修正轴系误差后的实测方位角、俯仰角。
由式(6)可知,俯仰上,零值、纵向光电偏差和动态滞后是相关的;方位上,光机偏差、横向光电偏差和动态滞后是相关的,因此无法直接对所有参数进行估计。
1.3 误差方程
已知动平台的实时位置(即观测站实时位置)和北斗卫星的实时位置,可得观测站观测北斗卫星的理论方位角和俯仰角。
在观测站站心坐标系下,北斗卫星的坐标为
(7)
式中:Xstation、Ystation、Zstation为观测站在大地坐标系下的坐标;Xp、Yp、Zp为北斗卫星在观测站站心坐标系下的坐标;Xsat、Ysat、Zsat为北斗卫星在大地坐标系下的坐标;P为转换矩阵,可表示为
(8)
式中:B为观测站的大地纬度;L为观测站的大地经度。
根据式(7)可得北斗卫星的站心坐标与站心极坐标的关系为
(9)
根据式(9)可得北斗卫星的理论方位角和俯仰角为
(10)
根据式(6)和式(10)可获得动平台雷达等效轴系参数标定的误差方程如下:
Ac-Atheory=ΔA=A0+βmsin(A-Am)tanE+
δmtanE+(Sb+Cs+ΔUA/CA)secE
Ec-Etheory=ΔE=E0+βmsin(A-Am)+
ΔEgcosE+(Ce+ΔUE/CE)
(11)
记X=βmsin(Am),Y=βmcos(Am),则:
Ac-Atheory=ΔA=A0+XsinAtanE-YcosAtanE+δmtanE+
(Sb+Cs+ΔUA/CA)secE
Ec-Etheory=ΔE=E0+XsinA-YcosA+ΔEgcosE+
(Ce+ΔUE/CE)
(12)
记待估轴系参数为x,则有:
(13)
记A矩阵为
(14)
v=Ax-l
(15)
(16)
(17)
2 轴系参数标校流程
基于北斗系统的船载USB轴系参数标校流程如下:
① 根据标校计划提前安排跟踪时间段,并预估船舶大致的位置。
② 获取北斗卫星导航接收机记录的星历数据。
③ 北斗卫星可见性预报,并判断是否满足USB轴系参数标校最优观测条件。若满足最优观测条件,可在预定时间段和海域开展USB轴系参数标校;若不满足最优观测条件需重新选定跟踪时间段。USB轴系参数标校最优观测条件的判断标准为:跟踪时间段内北斗卫星高度角在10°~60°范围内至少有3颗,且分布均匀。
④ 生成北斗卫星瞬时轨道根数。
⑤ 数字引导软件装订北斗卫星瞬时轨道根数,生成数字引导数据。
⑥ USB设备根据数字引导数据跟踪北斗卫星。跟踪过程中,实时记录USB跟踪角度测量数据、捷联惯导数据、卫导数据、变形数据、北斗卫星星历和气象数据等,并记录各北斗卫星的跟踪时间段。
⑦ 根据步骤⑥中的相关数据,使用基于北斗系统的船载USB轴系参数标校软件开展USB轴系参数标校,获得USB轴系参数标校结果。
⑧ 跟踪其他北斗卫星(未参与标校的北斗卫星)或其他时间段的北斗卫星对新标校的轴系参数进行验证。
基于北斗系统的船载USB轴系参数标校流程如图1所示。
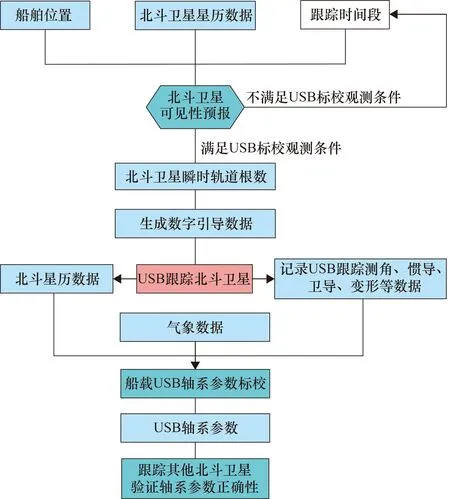
图1 基于北斗系统的船载USB轴系参数标校流程
3 算例分析
为验证基于北斗系统的船载USB轴系参数标校方法及数学模型的正确性,2021年4月开展了一次USB跟踪北斗卫星试验,USB跟踪北斗卫星详细情况如表1所示,跟踪北斗卫星星空图如图2所示。
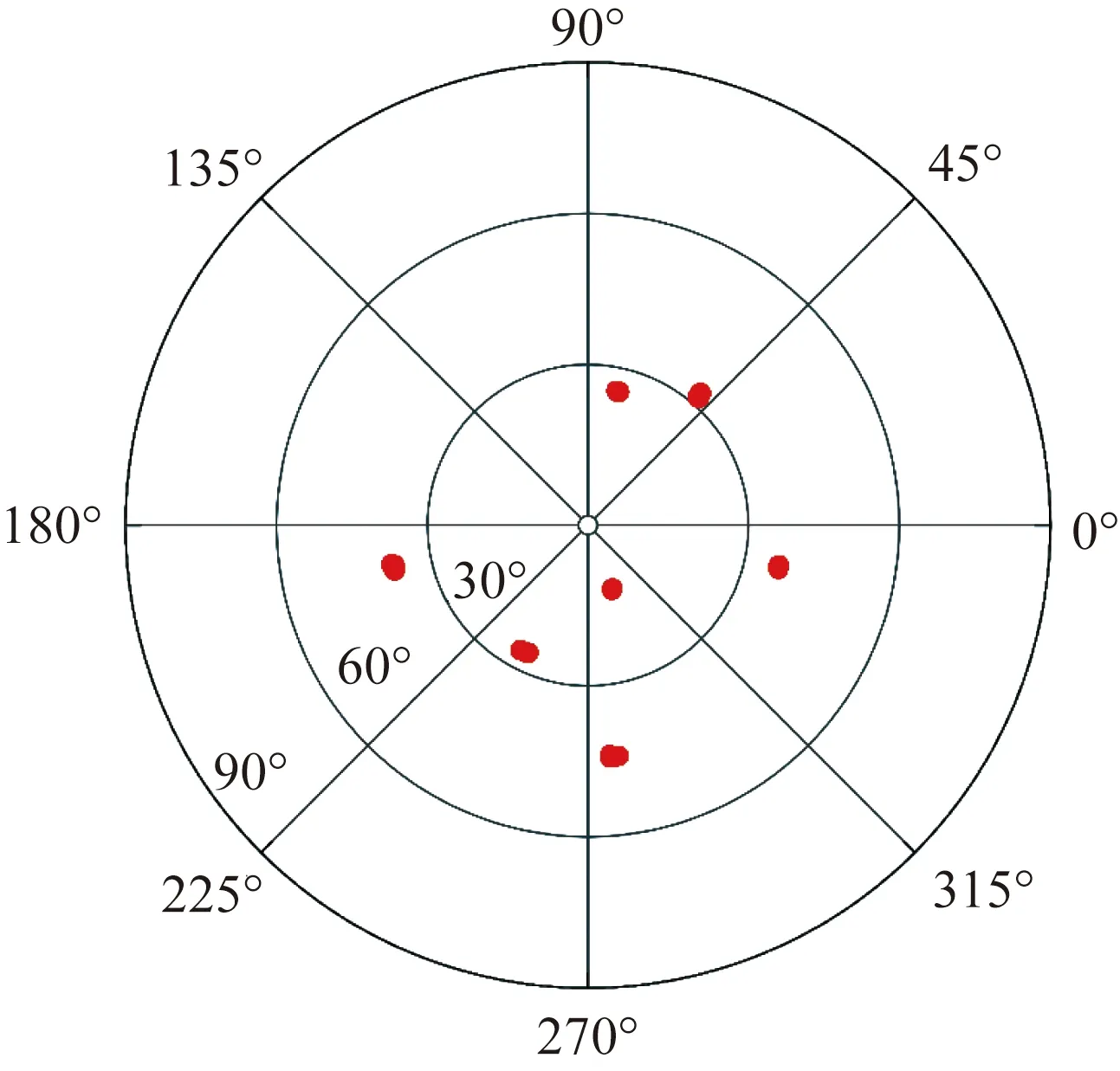
图2 跟踪北斗卫星星空图
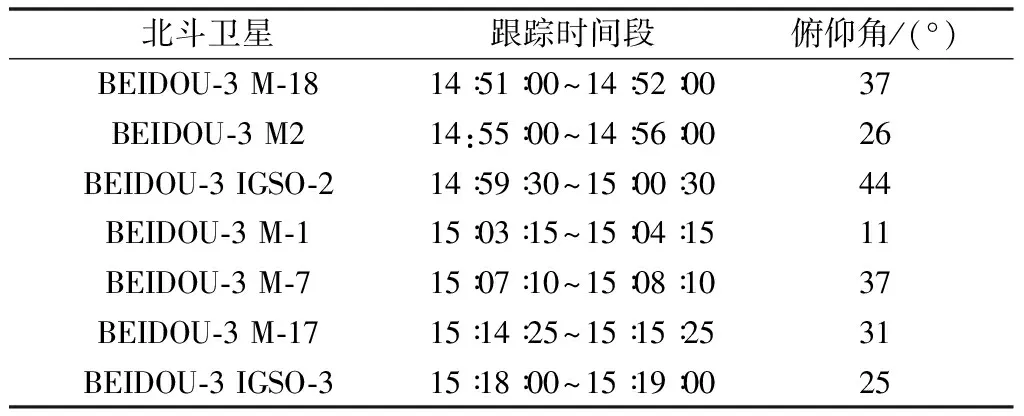
表1 USB跟踪北斗卫星详细情况
首先装订2021年3月跟踪6 d标校星标定的轴系参数,如表2所示。分析2021年4月份USB跟踪北斗卫星数据质量,并以分析结果作为基于北斗系统的船载USB轴系参数标校方法的比对参考。以北斗卫星广播星历为比对基准获得比对结果,如表3所示。比对的方位俯仰残差变化情况如图3所示。
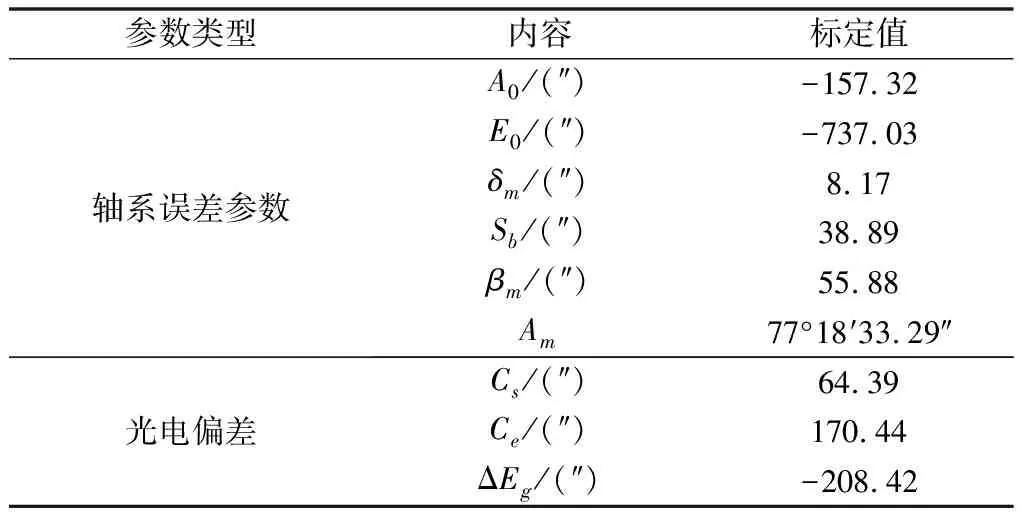
表2 跟踪6 d标校星标定的轴系参数
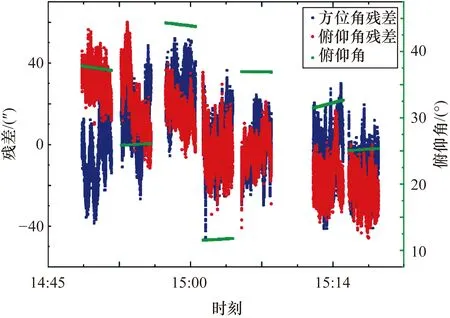
图3 基于标校星标定的轴系参数的方位俯仰残差图

表3 基于标校星标定的轴系参数的残差统计表
从图3和表3的残差分析结果可知,2021年4月份USB跟踪北斗卫星数据质量较好,北斗轨道等数据处理模型是正确的。
使用基于北斗系统的船载USB轴系参数标校方法处理2021年4月USB跟踪北斗卫星数据,以北斗卫星广播星历为参考基准,标定USB轴系参数。基于USB跟踪北斗数据标校获得的轴系参数如表4所示。基于跟踪北斗卫星数据估计轴系参数的方位俯仰残差如图4所示,残差统计情况如表5所示。
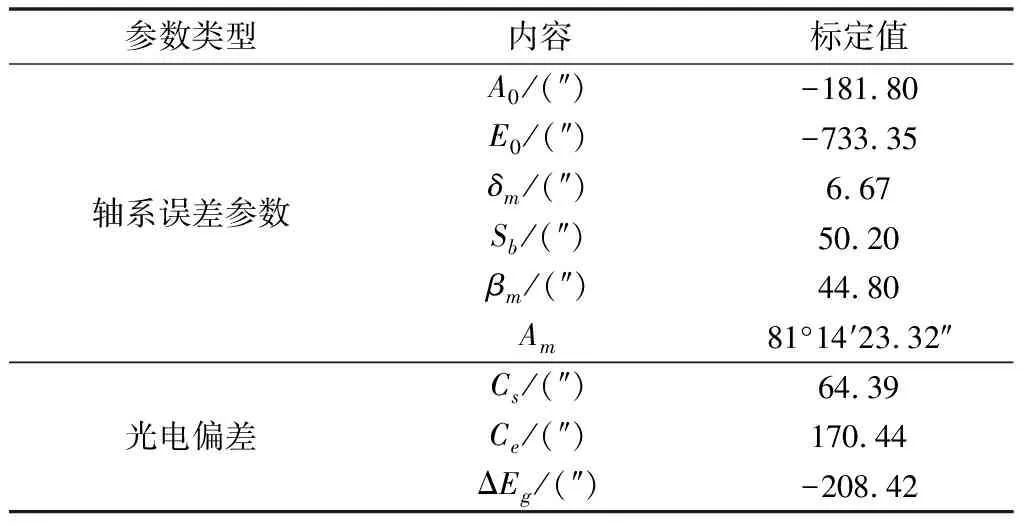
表4 基于USB跟踪北斗数据标校获得的轴系参数
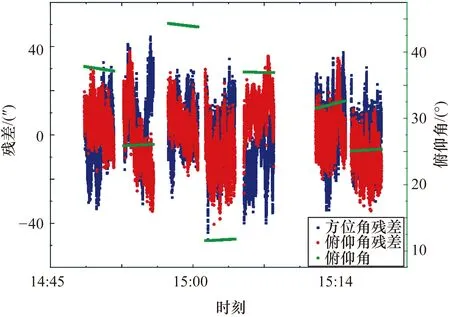
图4 基于跟踪北斗卫星数据估计轴系参数的方位俯仰残差图

表5 基于跟踪北斗卫星数据估计轴系参数的残差统计表
比较表2和表4两组轴系参数发现,俯仰零位差异很小,且各项误差总和差异也很小,但是和方位相关的误差项不尽相同。主要原因是此次试验仅使用了7颗北斗卫星的有效数据,北斗卫星运动相对较慢,实际上每颗卫星相当于只有1个有效的方位俯仰观测量,且7颗卫星俯仰方向的分布相对均匀。初步分析认为在方位上的数据量较少,进而导致与方位角相关的轴系参数标定结果不稳定。
为进一步分析使用标校星标定方法和使用北斗系统标校方法的效率,对某标校星方位俯仰覆盖范围进行仿真分析,如图5所示。考虑到轴系参数估计方位俯仰角度覆盖范围要求、标校星轨道回归周期、轴系参数标校结果验证和避开深夜作业等因素,使用标校星标定方法至少需要3 d才能完成一次标校。
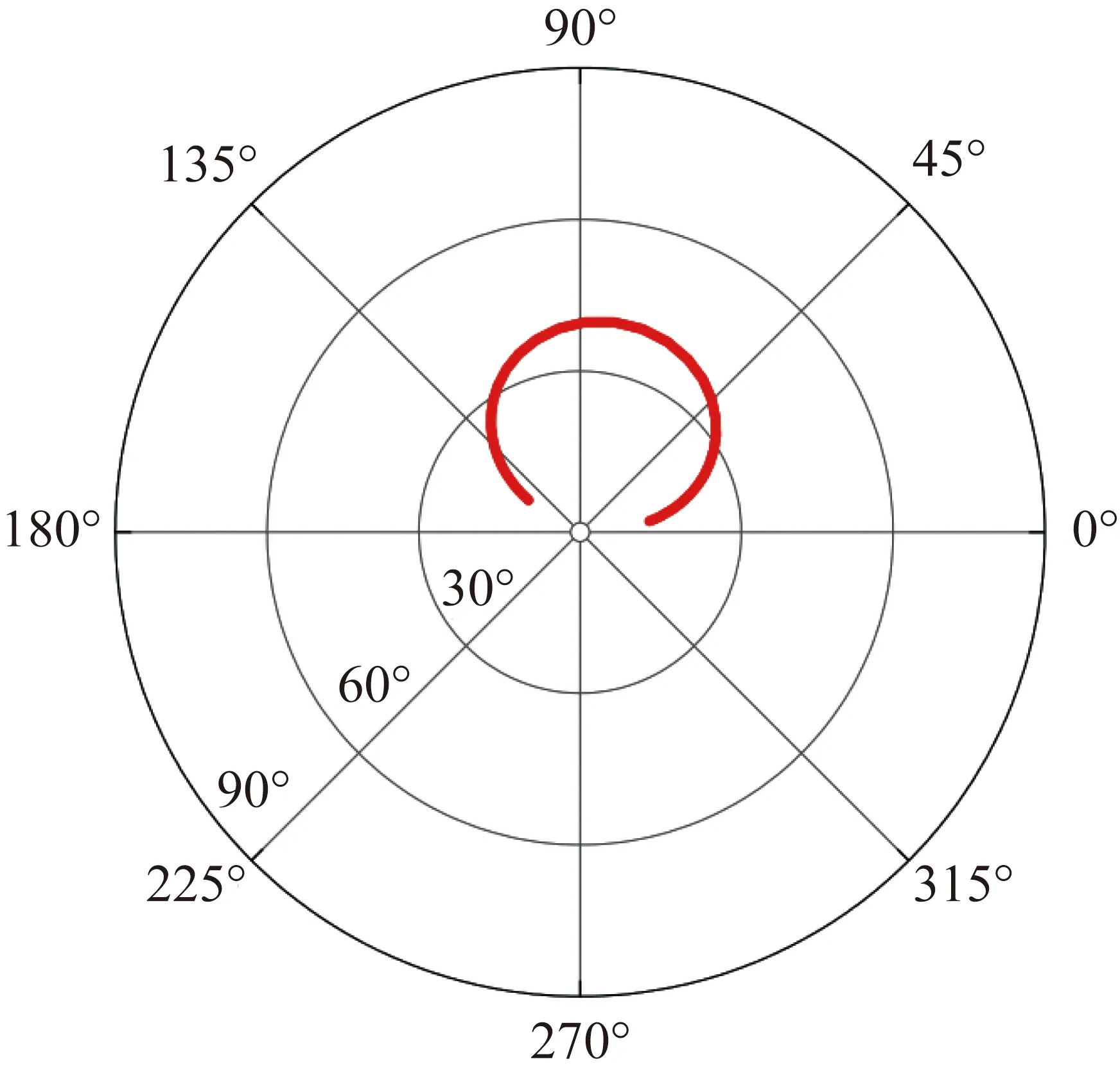
图5 某标校星方位俯仰覆盖范围仿真图
比较使用标校星标定方法和基于北斗系统的船载USB轴系参数标校方法发现:2种方法获取的轴系参数精度基本相当,但使用基于北斗系统标校方法仅需1 h即可完成标校,使用标校星标定方法至少需3 d才能完成一次标校,且基于北斗系统的标校方法可随时组织实施。因此,基于北斗系统的标校方法在标校效率方面有明显的优势。
针对与方位角相关的轴系参数标定结果不稳定的情况,可通过以下2种方法进行解决:① 增加跟踪北斗卫星的数目;② 在船舶转向过程中USB跟踪北斗卫星,通过转向获得更多方位方向上的观测数据。
4 结束语
针对目前直接标校USB电轴参数受限于标校星数量少、轨道回归周期长、单次跟踪角度覆盖性较差且需多天跟踪才能完成一次标校,同时获取事后精轨周期长,导致标校时效性差等问题,在目前直接标校电轴参数的方法基础上,充分利用北斗卫星资源较多和分布均匀,包含有不同轨道周期的卫星的特点,通过合理设计USB跟踪北斗卫星方案提高了USB轴系参数标校的效率。根据试验验证,基于北斗系统的船载USB轴系参数标校方法可行,标校结果满足USB测角精度指标要求。本方法实施方便,可推广至各类动态平台雷达的参数标定。
