窄体车主动侧倾极限态动力学机理研究*
2023-02-13徐东鑫王国业
徐东鑫,王国业,王 亚
(1.中国农业大学工学院,北京 100083;2.北京坐骑科技有限公司,北京 101300)
前言
近年来,汽车保有量持续增长,其带来的交通拥挤、能源危机与环境污染亟待解决,而大部分乘用车日常使用为单人或少人驾乘,存在大量空间及能源浪费。针对个人交通的窄体车辆有助于这些问题的解决[1],窄体车辆应用主动侧倾技术,控制车身向弯道内侧倾斜[2],利用重力产生的力矩平衡离心力矩而避免车辆侧翻[3]。现阶段对于窄体车的研究主要关注于其主动侧倾的实现[4],应用主动侧倾技术提高窄体车侧翻安全性,但主动侧倾窄体车附着极限态问题也是需要解决的突出问题,另外为进一步提高窄体车运动性能和未来自动驾驶技术[5-6]的引入,研究主动侧倾窄体车附着极限动力学性能及控制具有重要价值。当轮胎与地面间达到附着极限,滑移率较大时,车辆进入附着极限运动状态,简称极限态。极限态是一种危险工况,但如果加以控制利用,能显著提升车辆运动性能,最大限度保证行车安全性。
专业车手可以通过手刹过弯、钟摆过弯和延迟制动等操纵技能实现对赛车漂移、甩尾的准确控制,这对研究窄体车主动侧倾极限态运动提供参考。专业赛车手根据驾驶经验,一般通过控制后轮高滑移同时前轮转向的方式,准确控制赛车漂移进入可控极限运动状态。专业车手有手刹漂移与驱动漂移两种方式,其中前轮都需具有转向能力而后轮则需达到附着极限。普通乘用车极限运动时极易出现侧滑和侧翻事故,通过主动侧倾控制可显著降低窄体车侧翻风险,但需要对主动侧倾窄体车极限态运动机理及特性进一步深入研究。
对于一般乘用车在轮胎与地面间达到附着极限时,车辆维持稳定状态时状态参数的分析分为两种:(1)根据考虑车辆纵向、侧向及横摆运动的车身3 自由度模型,获得车辆状态参数变化率为零即稳定状态时车辆状态参数值;(2)根据整车动力学模型,对车辆处于某路面条件时的相平面图分析获得平衡点位置。Gerdes 等[7-8]认为车辆纵向速度、侧向速度和横摆角速度稳定时车辆可维持轮胎与地面间达到附着极限同时以某固定姿态运动,分析后轮驱动车辆在高侧滑角转弯时的动力学特性;此外,Velenis[9-11]、Khan[12]和Milani[13]等同样应用车身3 自由度模型,对理想极限态运动所需的转向条件进行数值计算。Bobier 等[14]利用横摆角速度—质心侧偏角相平面,分析轮胎与地面间达到附着极限时平衡点状态。参考常规窄体车极限态运动分析,可分析窄体车主动侧倾极限态运动机理,但由于其具有主动侧倾特性,窄体车侧倾动力学特性与常规窄体车存在一定差异。
由于窄体车主动侧倾特性,其极限态运动与常规窄体车不同。建立结合UniTire 轮胎模型的非线性动力学模型并考虑由纵向运动、侧向运动以及主动侧倾引起的垂向载荷转移,分析窄体车主动侧倾极限态稳态运动机理以及状态参数相平面,并说明窄体车主动侧倾在轮胎与地面间达到附着极限时其极限态运动特点。
1 窄体车主动侧倾非线性动力学建模
为精确描述窄体车主动侧倾运动,根据窄体车主动侧倾运动特点,结合非线性轮胎模型,建立整车动力学模型。
1.1 整车动力学建模
所研究窄体车(如图1 所示)具有主动侧倾特性,为表述窄体车极限态运动特点,建立如图2 所示的动力学模型,其纵向运动、侧向运动、横摆运动和侧倾运动的动力学方程如式(1)-式(4)所示。其中,主动侧倾窄体车的侧倾运动由基于规则的主动侧倾控制器实现特定规律的车身侧倾角度,因此式(4)可独立解析。

图1 主动侧倾窄体车
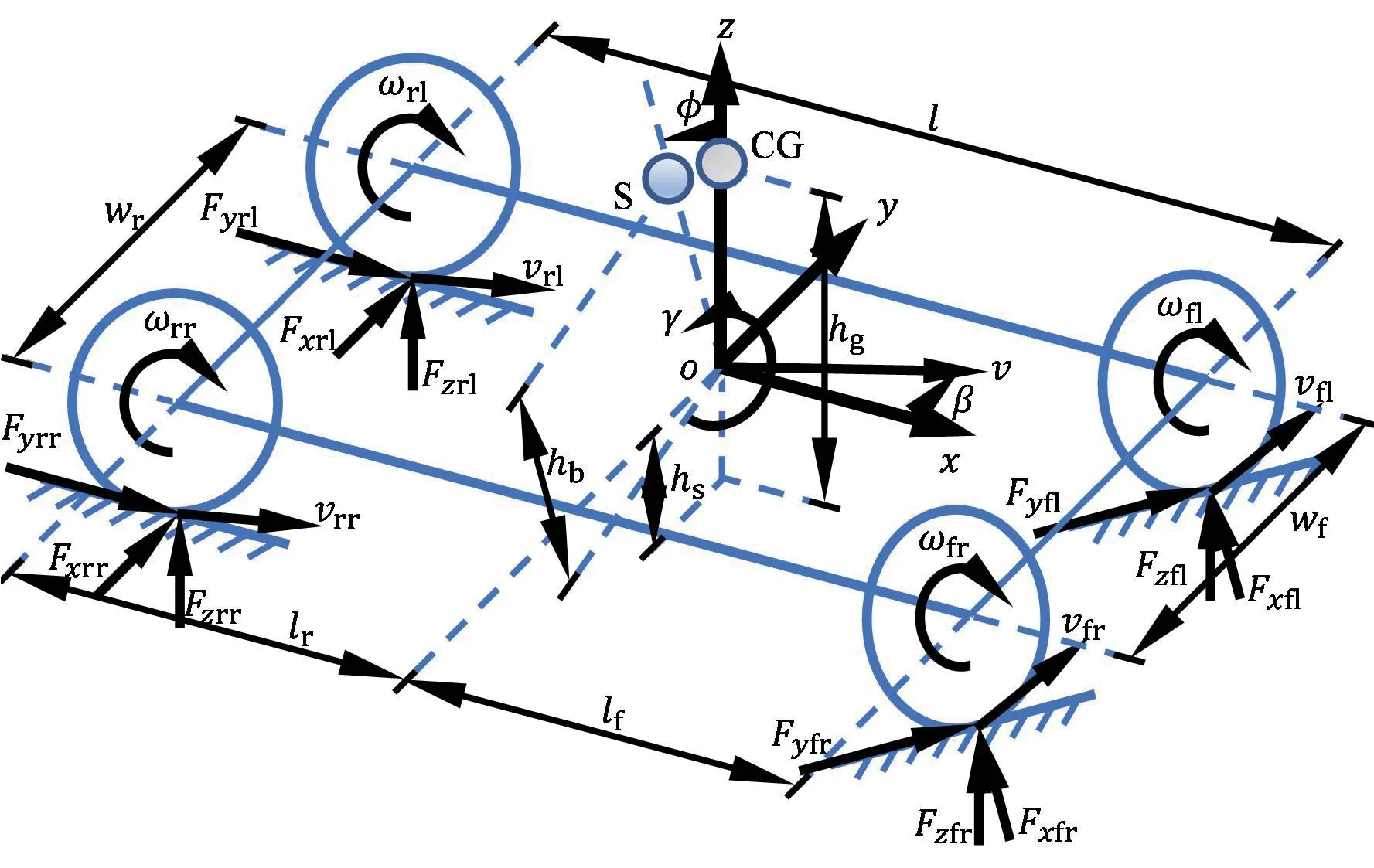
图2 整车动力学模型
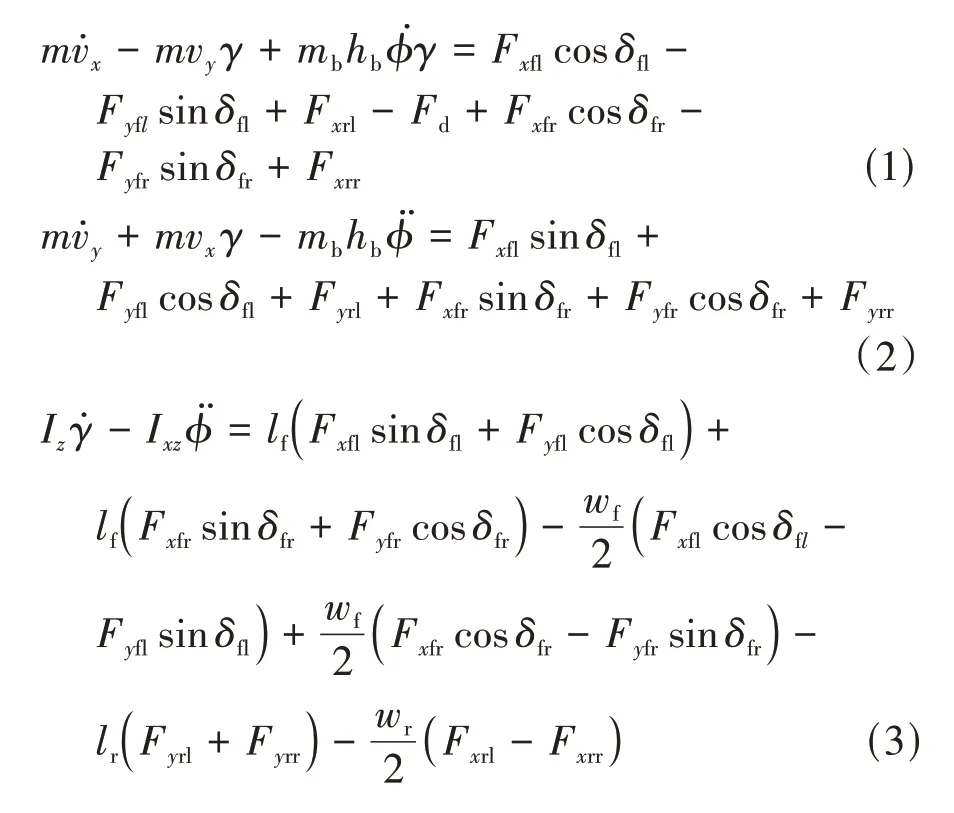

式中:m、mb分别为整车质量和车身质量;δf为前轮转向角;δfl与δfr满足阿克曼转向关系;vx、vy分别为车身质心处的纵向及侧向速度,vy=vxtanβ;β为质心侧偏角;γ为横摆角速度;φ为车身侧倾角;Fd为空气阻力,Fd=为空气阻力系数,Af为迎风面积;Fkij为各轮胎与路面的各向力(k为x、y、z表示方向,i为f、r区分前后轴,j为l、r区分左右轮);li为整车质心到前后轴的距离;wi为前后轴轮胎的距离。
在路面附着条件一定时,轮胎垂向载荷决定轮胎接地面极限附着力[15]。窄体车主动侧倾极限态是轮胎与地面间达到附着极限时的车辆运动,因此垂向载荷分布对窄体车主动侧倾极限态运动有重要影响。由于窄体车主动侧倾具有主动侧倾特性,因此除纵向运动、侧向运动引起的载荷转移外,还存在其主动侧倾引起的载荷转移,其垂向载荷满足:
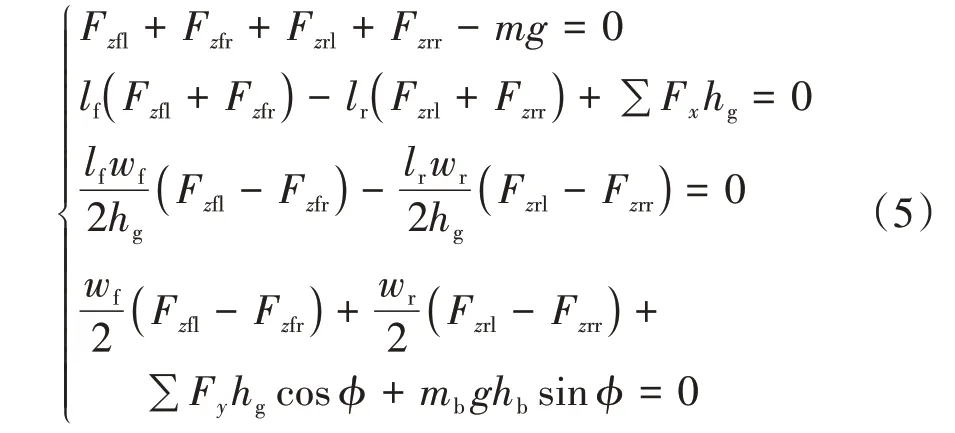
式中:hg为整车质心高;hb为车身质心到侧倾轴线的距离。
1.2 轮胎力分析
进行极限态运动时,轮胎具有强非线性,且处于侧偏纵滑复合工况,参考能精确描述轮胎在复杂工况下的力学特性的UniTire 统一轮胎模型[16-17],对窄体车主动侧倾极限态时轮胎力进行分析。
轮胎的纵向和侧向滑移率Sxij和Syij为

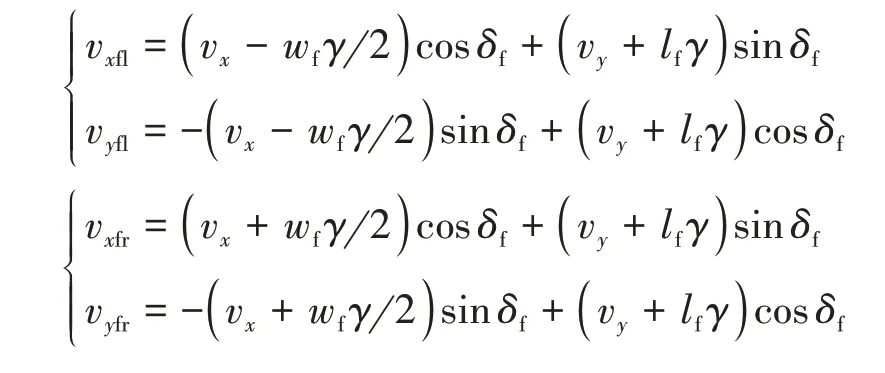
式中:reij为有效滚动半径;ωij为车轮的旋转角速度;vxij和vyij分别为车轮运动速度vij在轮胎坐标系纵向及侧向的分量。前后轴各轮轮速表达式如下:

轮胎相对纵向、侧向和综合滑移率φxij、φyij和φij为
式中:Cxij、Cyij分别为轮胎纵滑、侧偏刚度,与轮胎垂向载荷等相关;μxij、μyij分别为轮胎与路面间的纵向、侧向摩擦因数,与轮胎滑移率等相关。
根据UniTire 统一轮胎模型分析,仅考虑轮胎主要力学特性即纵侧向受力情况,轮胎与地面间的纵向力Fxij、侧向力Fyij和总切力Fij之间满足:

UniTire轮胎模型基本式[16-17]为
式中:Eij为总切力曲线的曲率因子,与轮胎垂向载荷及滑移率等相关;λdij为方向因子[16],能准确表达总切力方向的变化趋势。
式中:φcij为临界滑移率;nij为模型参数。
2 主动侧倾窄体车极限态稳态运动机理
稳态圆周运动时,车辆以恒定速度vs绕某一点做恒定半径Rs的圆周运动,则存在恒定纵向速度、恒定侧向速度、恒定质心侧偏角βs、恒定车身侧倾角φs及恒定横摆角速度γs且。那么此时,加速度v˙等参数满足:

考虑窄体车主动侧倾实际控制中仅对前后轴车轮分别控制并不对左右侧车辆分布控制,在稳态圆周运动时,窄体车主动侧倾动力学模型变为
2.1 后轴轮胎作用力分析
在附着极限状态时,窄体车主动侧倾极限态运动,前后轴轮胎与地面间均处于附着极限状态,结合式(6),稳态时后轴轮胎纵向合力及总切力满足:
式中:μr是后轴处的附着系数是稳态附着极限状态时后轴处的垂向载荷。结合式(11)~式(14),得到窄体车主动侧倾极限态稳态运动时后轴轮胎作用力。
2.2 前轴轮胎作用力分析
式(8)与式(9)联立可得前轴轮胎总切力:

由于前轴轮胎处于附着极限,结合式(5)可知,前轴轮胎侧向合力、纵向合力和总切力为
式中:μf是前轴处的附着系数;是稳态附着极限状态时前轴处的垂向载荷。
车辆进行主动极限态运动时,前轮处侧向滑移率φxf相对较小,式(16)可变为

分析窄体车极限态稳态运动时前轴轮胎作用力时,将式(12)、式(15)及式(17)相结合。
基于上述分析,根据式(5)中对于左右载荷转移的表述,对稳态时前后轴左右侧轮胎垂向载荷进行分析,结合UniTire 轮胎模型式(7)匹配计算,获得窄体车主动侧倾进行极限态运动时前后轴左右侧轮胎力。
3 窄体车主动侧倾极限态相平面分析
根据整车非线性动力学模型,若前轮转向角固定,根据轮胎与地面附着极限态动力学分析,获得前后轴左右侧轮胎各方向作用力,在其纵向行驶速度恒定的工况下,其微分方程可表示为自治系统,进行相平面分析。
3.1 常规窄体车极限态运动相平面
对常规窄体车进行分析时,式(1)-式(4)表示其整车系统。为清晰表明常规窄体车与主动侧倾窄体车状态参数变化规律,采用相同的车辆参数,如表1所示。通过控制轮胎滑移率,使得窄体车实现轮胎与路面间达到附着极限,其质心侧偏角速度-质心侧偏角度相平面见图3(a),其横摆角速度-质心侧偏角相平面见图3(b)。在以5 m/s 纵向速度在附着系数为0.75 的路面进行极限态零转向行驶时,常规窄体车平衡状态时质心侧偏角速度为零,中心平衡点的质心侧偏角与横摆角速度均为零是直线行驶状态;非中心平衡点关于原点对称均为圆周运动,且质心侧偏角分别为0.33、-0.33 rad,相应的横摆角速度分别为-1.75、1.75 rad/s。
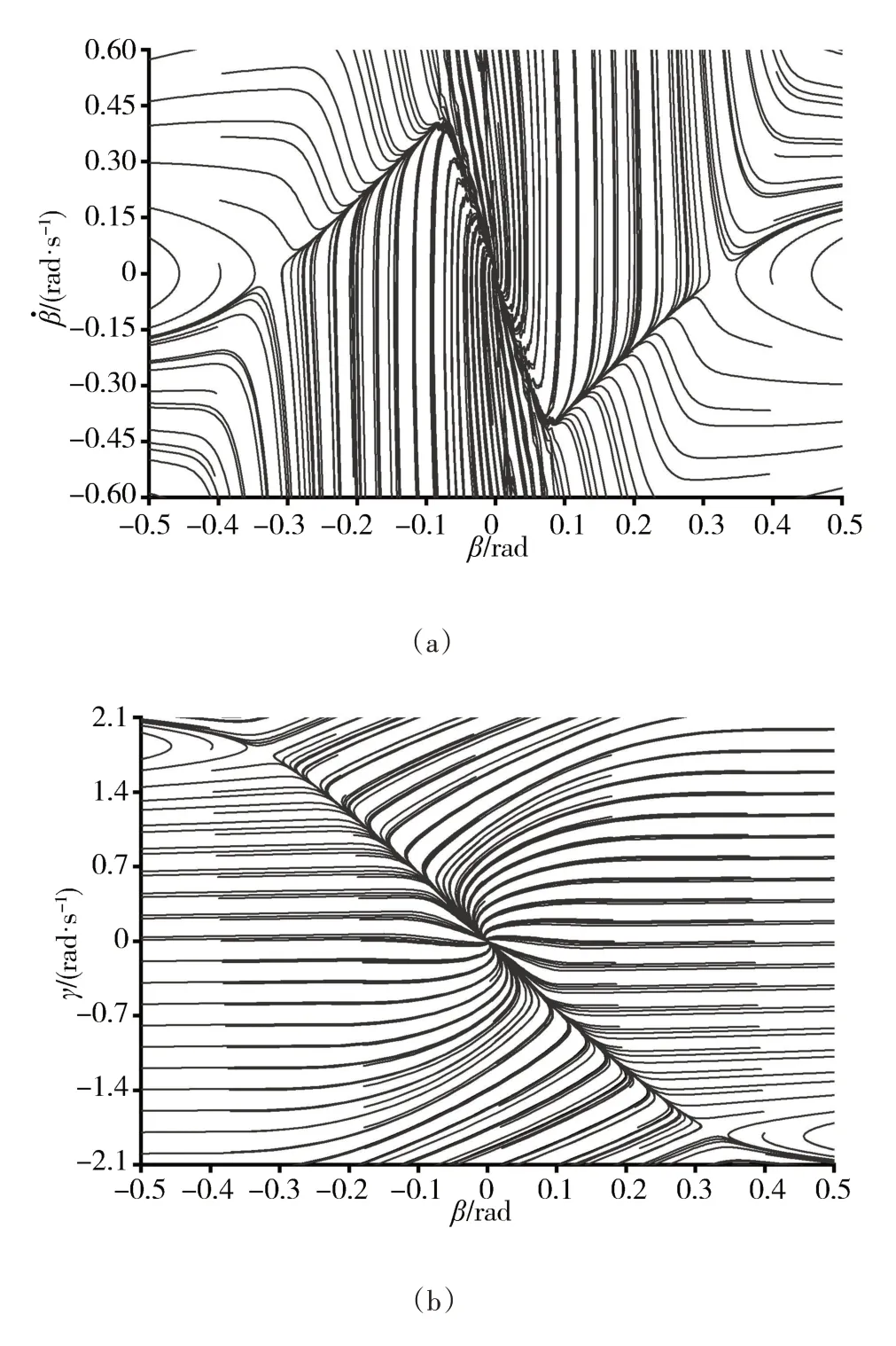
图3 常规窄体车极限态状态参数相平面

表1 窄体车主要参数
3.2 窄体车主动侧倾极限态运动相平面
窄体车主动侧倾运动由相应控制器和电机实现,其车身侧倾角度与行驶速度及轨迹半径相关[2]且相对稳定。对窄体车主动侧倾状态参数相平面分析时,考虑与常规窄体车相同工况运动时状态参数的变化情况,如图4 所示,主动侧倾窄体车车身侧倾角度根据主动侧倾特性[2]φ=arctan(v2/g/R)计算得到,侧倾角方向随轨迹方向变化,且认为主动侧倾控制器能实现目标侧倾的稳态运动。在以5 m/s 纵向速度在附着系数为0.75 的路面,通过控制轮胎滑移率使得轮胎与路面间达到附着极限进行极限态零转向行驶时,与常规窄体车相似,主动侧倾窄体车平衡状态时质心侧偏角速度为零,中心平衡点的质心侧偏角与横摆角速度均为零是直线行驶状态,非中心平衡点关于原点对称均为圆周运动;但区别于常规窄体车,主动侧倾窄体车非中心平衡点处质心侧偏角与横摆角速度均向中心原点趋近。

图4 窄体车主动侧倾零转向状态参数相平面
主动侧倾窄体车处于非零转向时,通过控制轮胎滑移率使得轮胎与地面间达到附着极限进行极限态运动,获得其状态参数变化相平面,如图5 中前轮转向角为0.18 rad,图6 中前轮转向角则为-0.18 rad。对比图4,主动侧倾窄体车以5 m/s 纵向速度在附着系数0.75 的路面极限态运动时,当前轮转向角为0.18 rad 时,其状态参数变化规律与零转向不同,其中心平衡点相对原点存在偏移,横摆角速度为0.42 rad/s,且偏移方向与前轮转向方向相同;当前轮转向角为0.18 rad 时,与零转向相比,状态参数非对称变化,非中心平衡点位置不再相对中心平衡点对称,且轨迹方向与转向方向相反的非中心平衡点(质心侧偏角为0.46 rad,横摆角速度为-1.45 rad/s,轨迹半径为-3.85 m)与中心平衡点的偏移量更大;根据图5 与图6,当前轮转向方向相反时,主动侧倾窄体车状态参数变化对称。
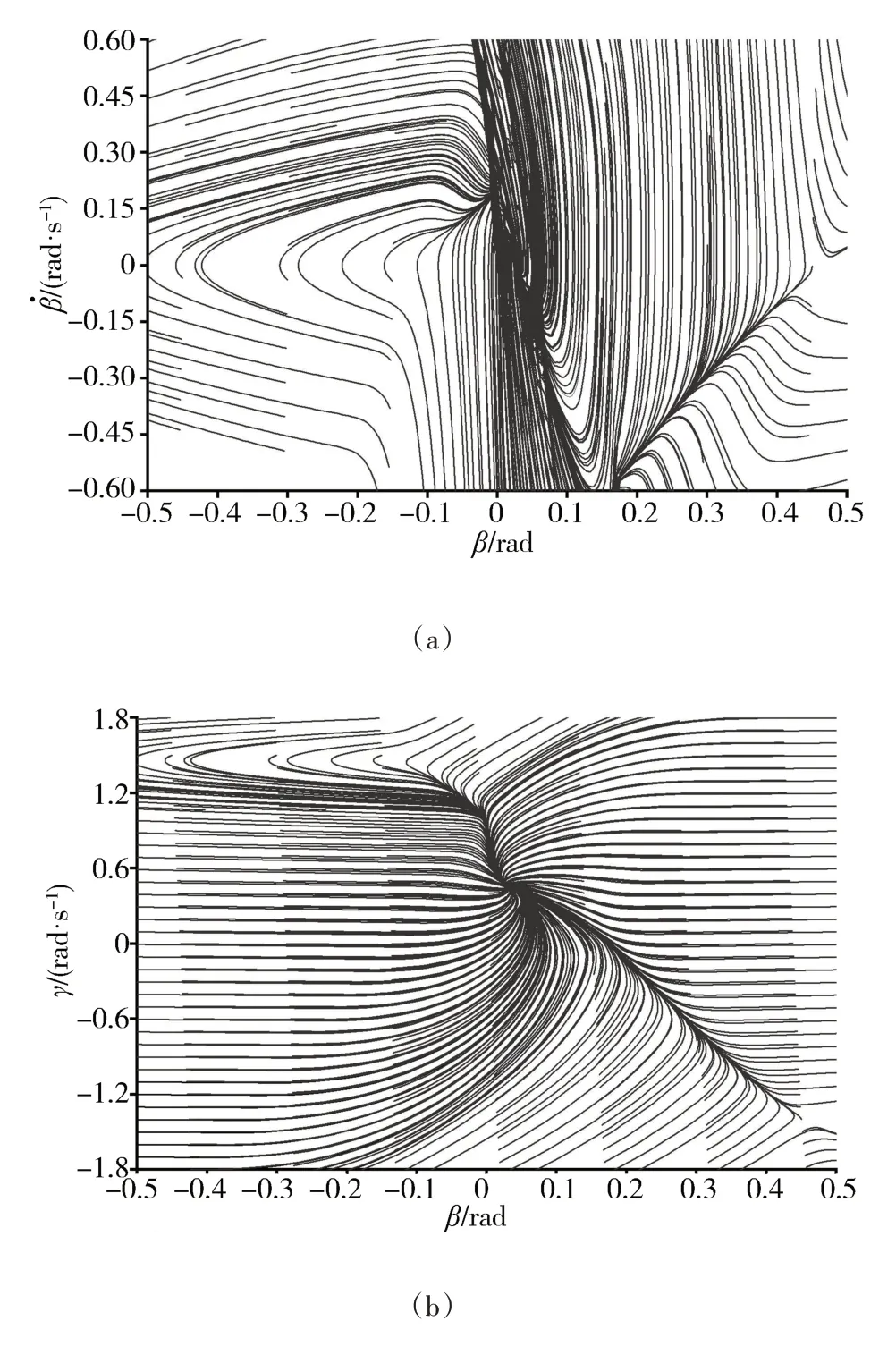
图5 窄体车主动侧倾前轮左转时状态参数相平面
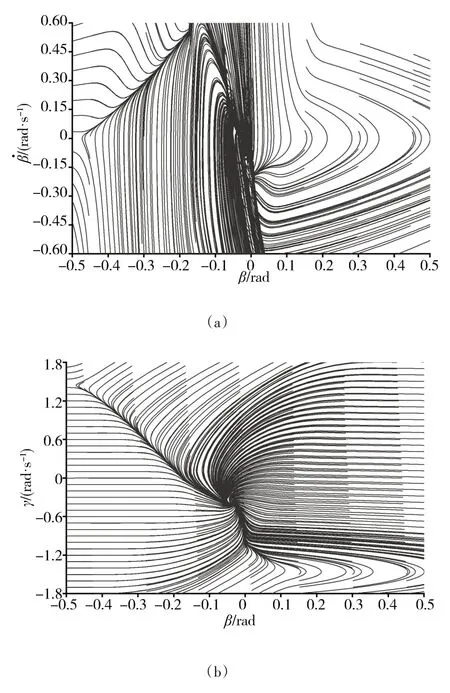
图6 窄体车主动侧倾前轮右转时状态参数相平面
根据非线性系统平衡点的定义[18],窄体车主动侧倾极限态稳态运动状态为其状态参数相平面平衡点状态。当前轮零转向时,主动侧倾窄体车非中心平衡点比常规窄体车状态参数绝对值略小;当前轮以相同角度相同正反向转向时,窄体车主动侧倾状态参数变化对称且有与转向方向相同的状态偏移。
4 窄体车主动侧倾极限态运动分析
4.1 窄体车主动侧倾极限态运动机理
根据第2 节对窄体车主动侧倾稳态运动的描述,认为其稳态运动轨迹方向与横摆角速度方向相同;并根据对窄体车主动侧倾极限态稳态运动机理,对不同路面附着条件下,窄体车主动侧倾实现不同轨迹半径的极限态稳态运动状态参数值解析。
路面附着系数为0.6 时,窄体车主动侧倾状态参数变化如图7 所示。窄体车主动侧倾可在一定速度范围内做轨迹半径|R|稳态圆周运动,其轮胎与地面间达到附着极限时轨迹半径|R|及其范围随行驶速度v增大而增大,当行驶速度v=5.0 m/s时其轮胎与地面间达到附着极限时轨迹半径|R|∈[4.30,6.30] m,当行驶速度v=7.5 m/s 时,其轮胎与地面间达到附着极限时轨迹半径|R|∈[9.60,14.20] m;其轮胎与地面间达到附着极限时的横摆角速度|γ|与轨迹半径|R|负相关,且附着极限态稳态轨迹半径|R|的范围随横摆角速度|γ|增大而减小,当横摆角速度|γ|=1.00 rad/s时轨迹半径|R|∈[5.10,8.25]m,当横摆角速度|γ|=1.60 rad/s 时轨迹半径|R|∈[2.00,2.65] m;车辆质心侧偏角度β及前轮转向角δf与其轮胎与地面间达到附着极限时轨迹半径R变化无明显相关关系;在轨迹方向相同时,前轮转向角δf与质心侧偏角β具有正相关关系;结合轨迹半径与行驶速度及横摆角速度相关关系,车辆行驶速度v与横摆角速度|γ|存在一定负相关关系。
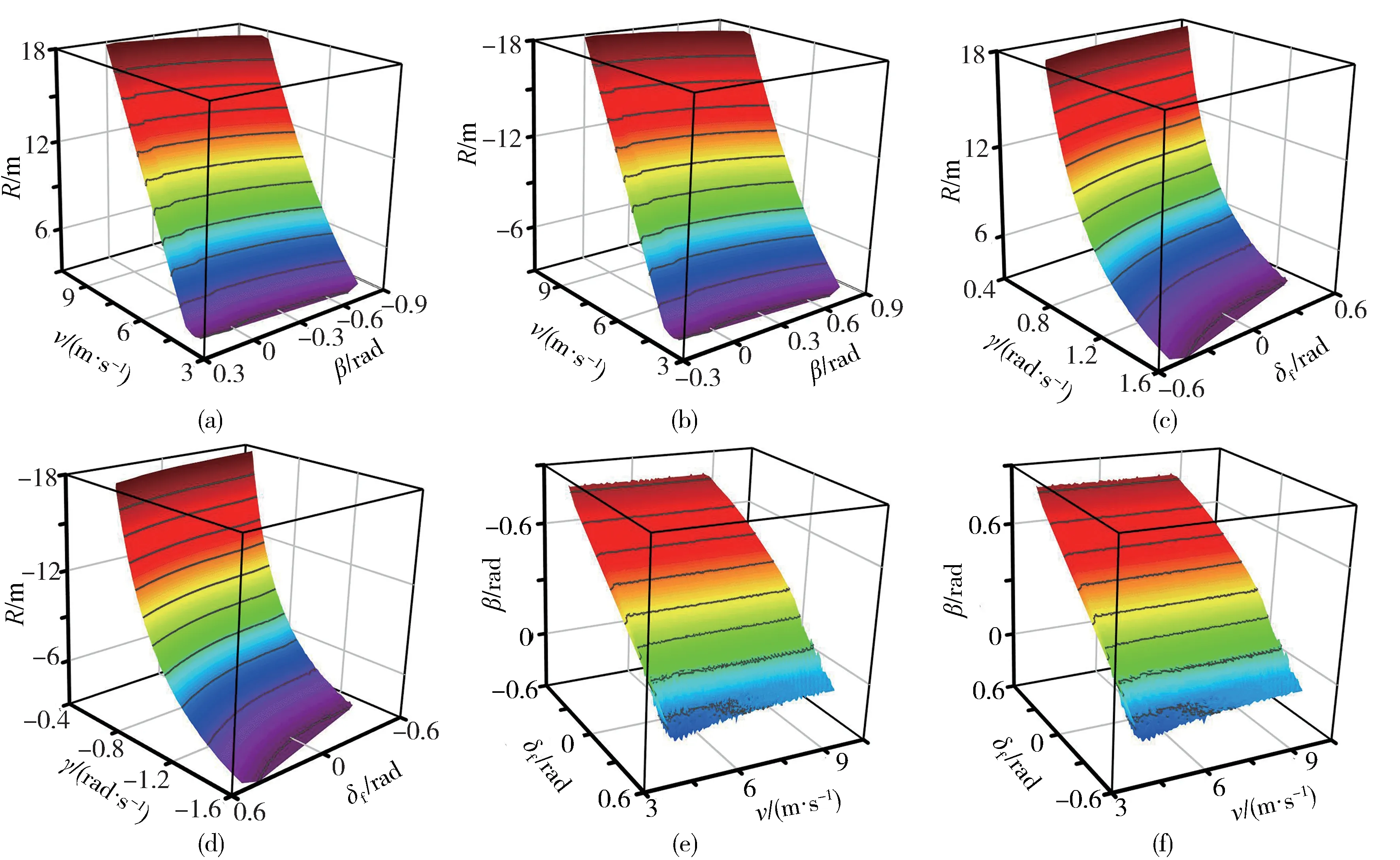
图7 附着系数0.6时,窄体车主动侧倾极限态稳态参数
路面附着系数为0.9 时,窄体侧倾车状态参数变化如图8 所示,其在相同附着条件下状态参数变化规律与图6相同。但当路面附着系数为0.9时,行驶速度v=5.0m/s,其轮胎与地面间达到附着极限时轨迹半径|R|∈[2.95,5.20]m;行驶速度v=7.5m/s,其轮胎与地面间达到附着极限时轨迹半径|R|∈[6.45,11.70]m。对比图7 与图8,可发现,路面条件变好,窄体车主动侧倾在相同速度v行驶时,其轮胎与地面间达到附着极限时轨迹半径|R|变小,车辆质心侧偏角度|β|、横摆角速度|γ|区间存在一定偏移,前轮转向角度δf区间变小。结合图7 与图8,窄体车主动侧倾其轮胎与地面间达到附着极限时,其横摆角速度|γ|较大,其稳态运动状态是相平面中的非中心平衡点状态。
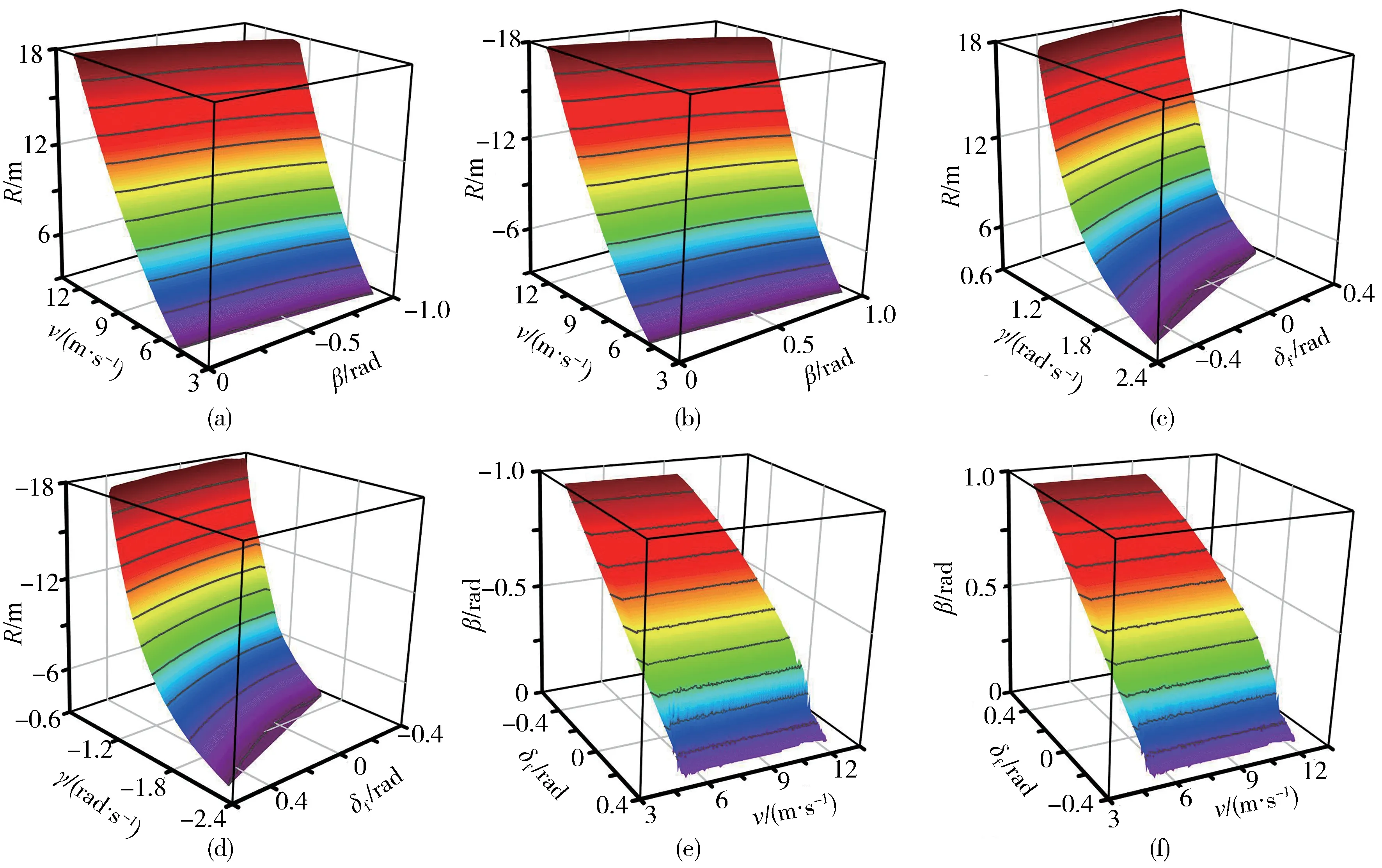
图8 附着系数0.9时,窄体车主动侧倾极限态稳态参数
4.2 窄体车侧倾极限态运动机理结果分析
基于上述对窄体车侧倾极限态运动机理结果及其状态参数变化规律的分析,对状态参数变化规律进一步说明。
对窄体车辆实现半径相同(如|R|=18 m)方向不同的极限态运动进行分析状态参数及控制参数如图9 所示。其中,后轮纵向滑移率为TYDEX 纵向滑移率κrj=,根据UniTire 模型匹配计算为图9(d)。当其轮胎与地面间达到附着极限时轨迹半径相同时,窄体车主动侧倾质心侧偏角β关于随前轮转向角δf的增大主要表现为增大的趋势,但在行驶速度v较大时存在一定减小趋势,其横摆角速度|γ|与前轮转向角δf正相关;窄体车主动侧倾在其轮胎与地面间达到附着极限进行轨迹方向相反的极限态运动时,其状态参数与控制参数的变化曲线对称,当前轮转向角较大时车轮轮胎力的极限态理论分析值与UniTire模型匹配值存在偏差。
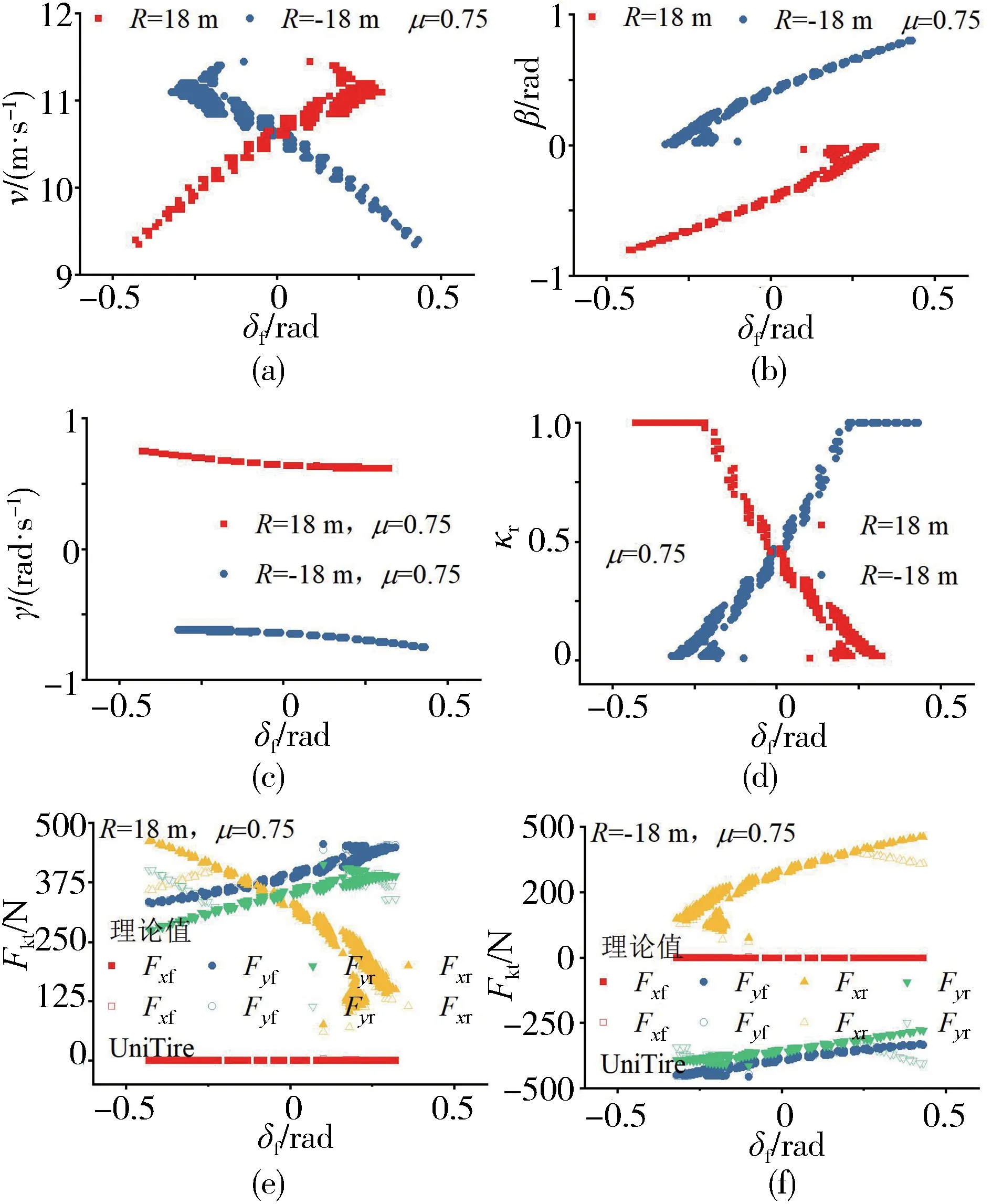
图9 忽略左右载荷转移时极限态稳态参数
对比常规窄体车不具备主动侧倾功能时其车身侧倾角度、车轮载荷转移量以及轮胎侧向滑移率(图10),窄体车主动侧倾极限态状态(图11)进行分析。根据图10(a)常规窄体车侧倾角度小于0.3 rad,根据图11(a)窄体车主动侧倾角度比常规窄体车侧倾角度值较大且方向相反;根据图10(b)与图11(b),窄体车主动侧倾可降低左右侧车轮载荷转移量,比常规窄体车不易出现单侧车轮离地的情况,其抗侧翻能力提高,更适合研究轮胎与地面间达到附着极限的极限态工况;根据图10(c)与图10(d)及图11(c)与图11(d),窄体车主动侧倾轮胎侧向滑移率与常规窄体车轮胎侧向滑移率基本相同。窄体车主动侧倾虽然使得其侧倾角度与常规窄体车不同,且降低左右侧车轮载荷转移量提高抗侧翻安全性,但其主动侧倾特性并没有对轮胎滑移率等极限态运动状态有较大影响。
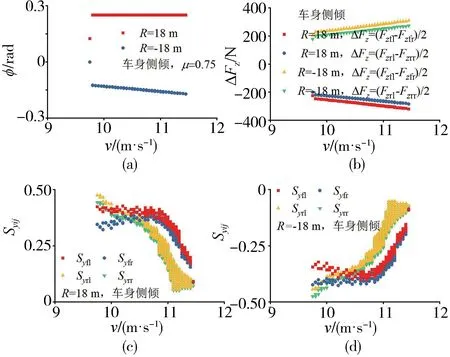
图10 常规窄体车极限态参数
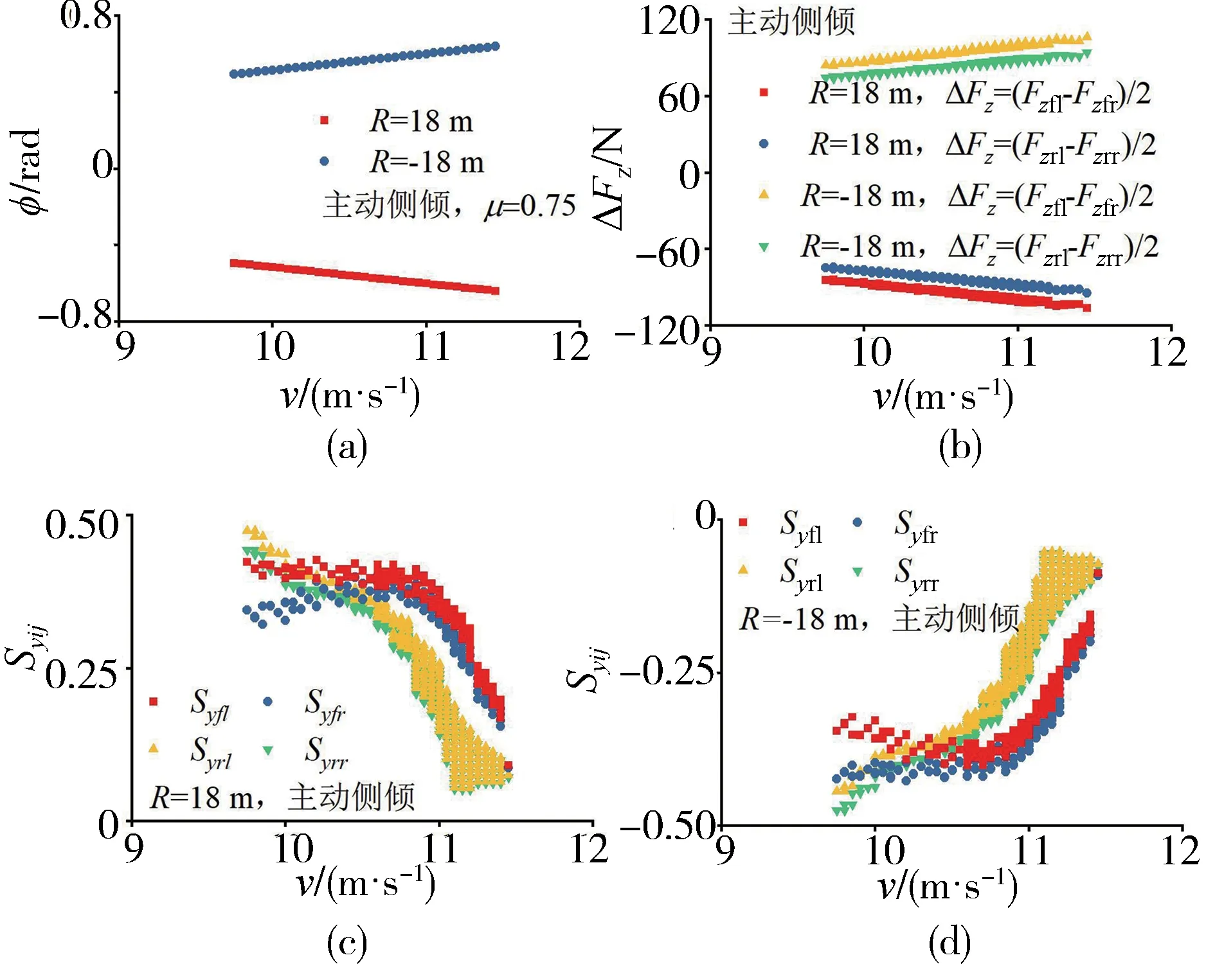
图11 具有主动侧倾功能窄体车极限态稳态参数
5 结论
本文中以采用主动侧倾技术具有一定防侧翻功能的窄体车作为研究对象,分析轮胎与路面间达到附着极限时的危险工况下极限态运动的机理及特性。通过建立基于主动侧倾控制的考虑纵向、侧向、横摆及车身侧倾的整车非线性模型,分析窄体车主动侧倾极限态稳态运动机理及极限态状态参数相平面特性。窄体车在通过控制轮胎滑移率使得其轮胎与地面间达到附着极限实现极限态运动工况下,状态参数维持相对稳定时的稳定运动状态是其极限态运动相平面的平衡点状态。根据窄体车侧倾极限态运动机理及相平面分析,可得到窄体车主动侧倾极限态运动特性。窄体车主动侧倾极限态运动时状态参数变化规律与常规窄体车存在一定差异,但其稳态极限态时除车身侧倾角度外,车辆及车轮状态参数未有显著变化,主动侧倾特性对极限态运动状态影响不大,且由于主动侧倾特性其极限态运动控制更易于实现,因此安全性更高。
