车车通信后备模式下智能轨旁对象控制器系统*
2023-02-12崔惠珊
崔惠珊 王 艳
(1.北京交通职业技术学院轨道交通系,102200,北京;2.北京运捷科技有限公司综合管理部,102400,北京∥第一作者,讲师)
在基于车车通信的列车运行控制系统中,正常运行模式下,列车通过车车通信获取前后车的实时状态,通信数据包括位置、速度和加速度等。后车基于自身车载控制器的运算能力预测前车的行驶轨迹,同时计算两车不发生位移重合的安全防护速度,以实现基于相对速度制动追踪模型的安全防护。车车通信系统由传统的以地面为中心控制转为以列车为中心控制,由于车的自主性提高,列车可根据自身的精确位置及时申请并释放道岔资源,提升了运行效率。
但在后备模式时,当通信中断、列车降级运行,若取消联锁、应答器、区域控制器和计轴器等系统,如何实现检测区段占用、获得列车位置、将信息传给列控中心及其他列车已成为研究的重点。本文基于车路协同的思路,利用UWB(超宽带)和 RFID(射频识别)技术设计了一种智能轨旁对象控制器系统,与车载系统等协同工作,实现了双向列车定位、列车车号识别、列车完整性判断、列车行驶方向判断和轨道占用检测等一系列基础功能,提供了地面设备办理进路的后备模式,保障了降级模式下列车高效的运行。本研究为车车通信列车运行控制系统降级模式的运行提供了研究思路与试验基础。
1 车车通信后备模式研究现状
车车通信系统的核心组成设备包括中心设备ATS(列车自动监控)、车载系统、车站OC(对象控制器)、道岔及通信系统等。基于车车通信的全自动运行系统架构如图1所示。
针对车车通信的后备模式,文献[1]提出一种基于雷达和摄像头两种传感器的远程瞭望系统,通过列车装备激光雷达、相机等传感器,实现前方障碍物感知。根据实际测试,在直道上的远程瞭望系统探测距离可达300 m。然而在弯道情况下,受到激光雷达和相机自身工作原理的影响,检测效果会变差。文献[2]提出一种可以提供联锁级、点式级的车车通信后备模式,便于在未装备车载设备或车载设备故障的列车线路内混合运营。在线路建设初期或为了提高降级运行效率,文献[3]提出在地面布置独立设备以实现降级列车的运行,如区段自动闭塞、部署计轴及信号机设备、增加联锁系统等。但目前若仅在岔区部署计轴系统,无法获取列车的行驶方向和列车车号,OC和ATS系统仍无法为列车办理进路。
对于后备模式下的非通信列车的线路资源管理,文献[4]提出经司机向行车调度员确认非通信列车的位置后,由行车调度员根据列车的运行计划在人机界面输入非通信列车位置、目的地等信息,再由列车管理设备为非通信列车申请当前位置到目的地之间所需的线路资源。然而,此种方案并不适用于FAO(全自动运行)模式。
2 UWB和RFID技术应用可行性分析
已有较多学者对如何将UWB技术应用于城市轨道交通系统进行了研究。文献[5]对信号系统故障下的列车应急运行控制系统进行了研究,将一个车载UWB信标与两个地面锚点组成测试系统,在北京地铁10号线莲花桥站、六里桥站、西局站三站两区间进行了测试,列车定位误差在5 m以内。
文献[6]对用于城市轨道交通定位算法的UWB技术进行了研究,根据城市轨道交通特点和UWB模块特性,采用最小二乘法、Taylor递归法、Kalman滤波等算法,使定位误差获得了显著改善,距离误差降低至10 cm以内,且绝大部分定位点距离误差小于5 cm,能够满足精准停车需求。
RFID技术在城市轨道交通中有较多的可行性研究。文献[7]研究了基于RFID技术的低地板有轨电车位置检测系统,并在北京亦庄新城有轨电车T1线上装车应用,位置检测系统显示列车在不同速度下(0~70 km/h),信标的读取率可达到100%。
3 智能轨旁对象控制器系统设计研究方案
3.1 总体架构
智能轨旁对象控制器系统应用架构如图2所示。智能轨旁对象控制器设备包括安全计算机平台、UWB锚点和RFID阅读器。轨旁UWB设备称之为锚点,为列车定位提供定位参考原点。安全计算机平台通过安全通信协议与ATS、OC等通信。车载设备传感器包括在车头和车尾分别部署两个异构的UWB模组(称为标签),以及在每一节车厢都安装RFID标签。
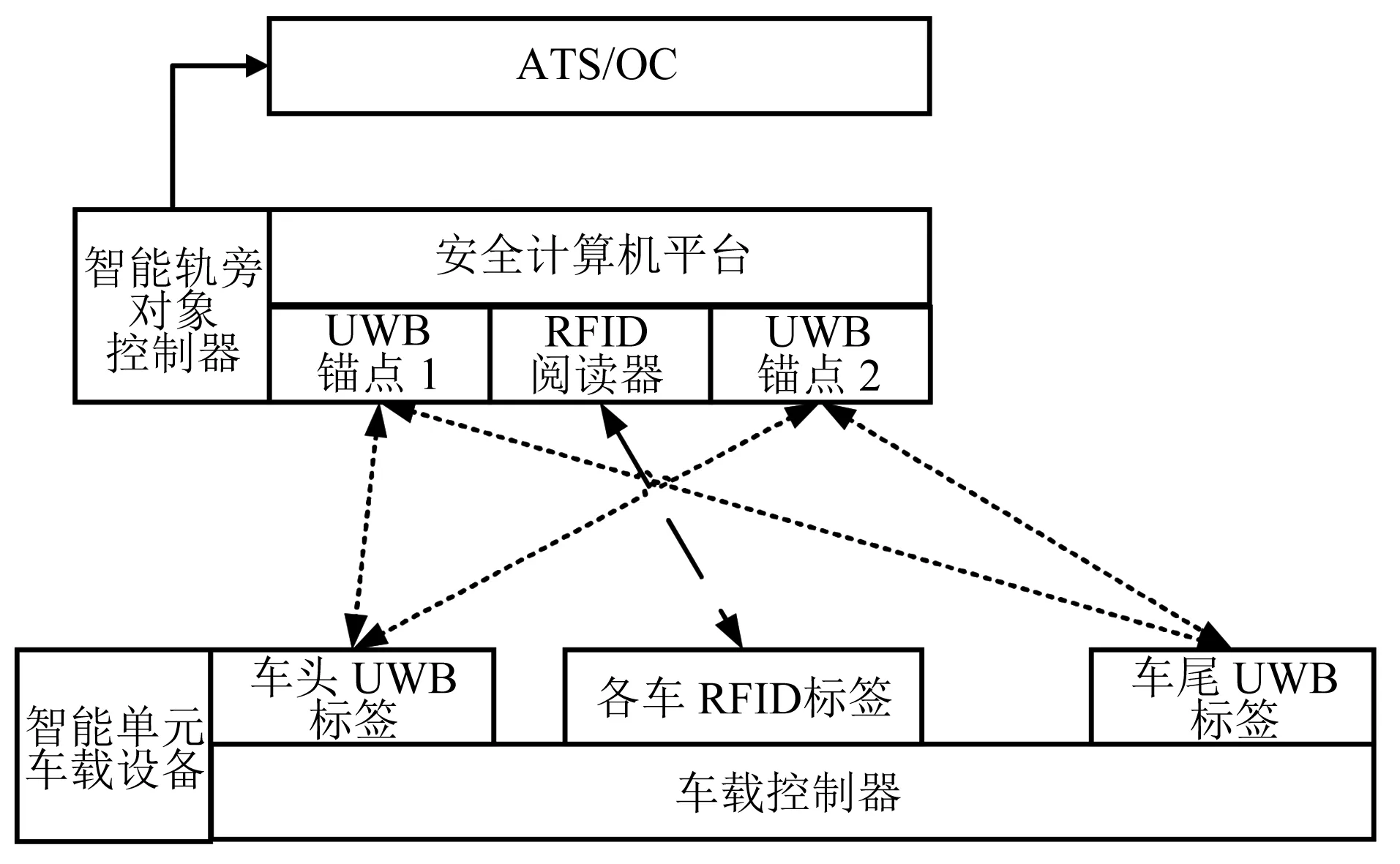
图2 智能轨旁系统应用架构图Fig.2 Application architecture diagram of smart trackside system
当列车运行到智能轨旁对象控制器附近时,列车上的UWB标签与轨旁锚点通信测距,使列车获得车载标签相对于锚点的距离,进而实现列车自身的精确定位。由于UWB技术下,锚点和标签的角色可以互换,轨旁UWB也能够获得列车的位置并发送至OC和ATS。以轨旁智能对象控制器为区段分界点,基于列车位置的OC能够通过计算获得区段的占用信息。
基于RFID和UWB技术,智能轨旁对象控制器可以获得车次和车号信息,并发送给ATS。在确保列车完整性的基础上,ATS依据车次与运行图排列进路,并在列车进入岔区前的一个区段由OC驱动道岔,道岔的锁闭信息通过UWB发送给非通信列车,列车在保证安全的情况下通过道岔。
3.2 双向列车定位分析
双向定位是指列车获得自身相对于锚点的位置,以及智能轨旁控制器获得列车在轨道上的位置。列车定位算法如图3所示。设点A是地面的UWB锚点1,点B是地面的UWB锚点2,两个锚点数据由安全计算机处理。点C是列车的车头UWB设备,点D是车尾的UWB设备。在安装部署锚点设备时可以确定距离AB,UWB直接测量距离AC、AD、BC和BD。由于列车完整性未知,距离CD是未知的。线段AC、AB和BC组成三角形。首先,基于三角形的边长关系,即两边之和大于第三边,两边之差小于第三边,判断三段距离是否合理。然后计算点C在直线AB上的投影点E的位置,可以获得AE长度和BE长度。若计算线段AE与线段AB的长度和约等于线段BE的长度,则认为计算点E的位置是合理的,即获得了车头距离UWB锚点的位置。同理可得车尾距离锚点的位置。定位算法流程图如图4所示。由于定位是通过两个异构的UWB和安全计算机平台实现的,架构上可以保证定位结果安全可靠,达到SIL4(SIL为安全完整性等级)级别。
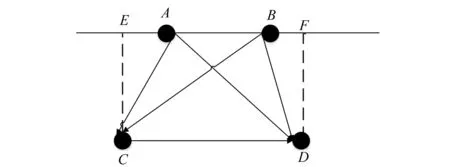
图3 列车定位算法示意图Fig.3 Diagram of train locating algorithm
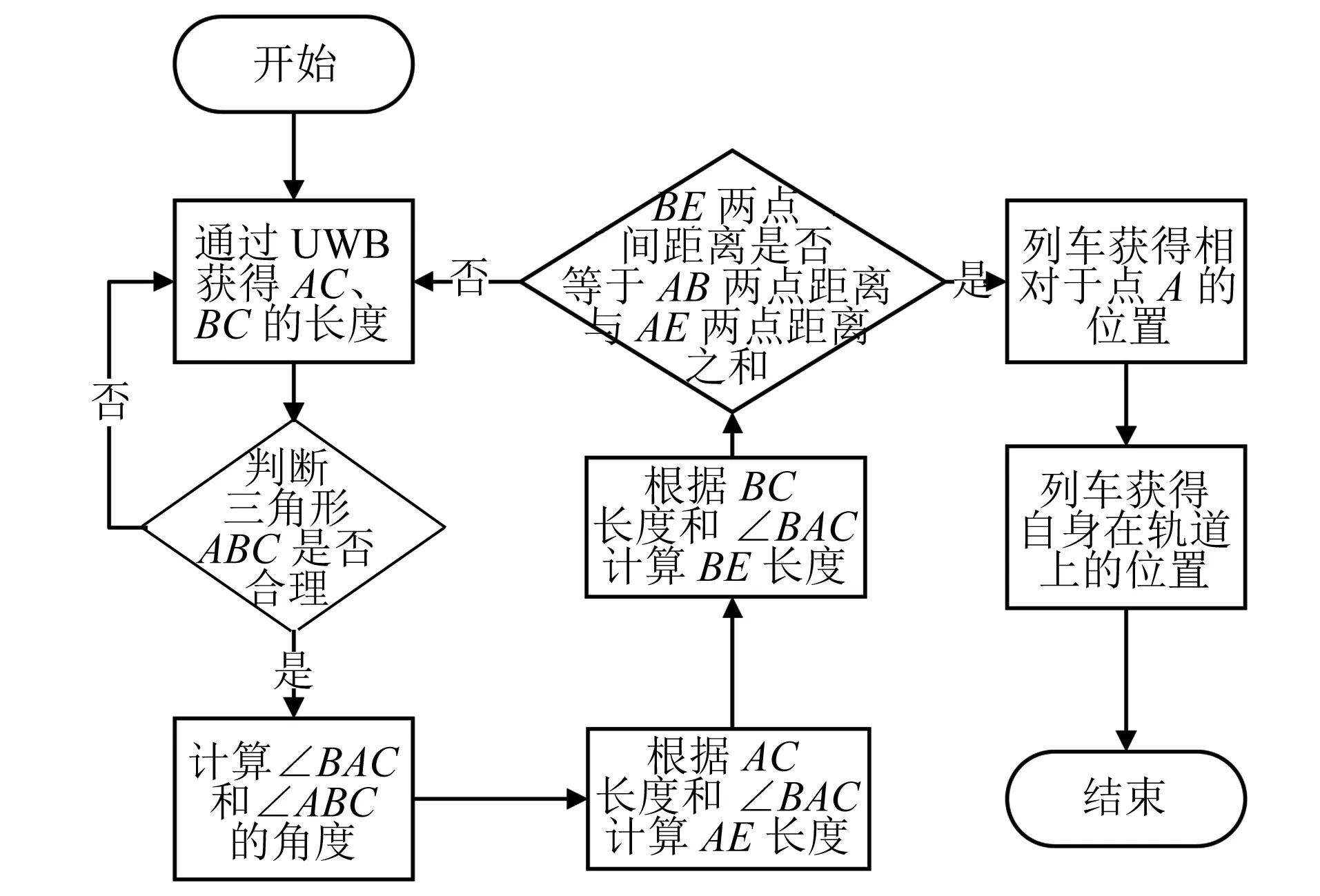
图4 定位算法流程图Fig.4 Flow chart of locating algorithm
3.3 列车车号识别分析
参考ATIS(铁路车号自动识别系统)中基于RFID获得车号的技术,当列车经过时,由轨道上部署的阅读器获得列车上RFID标签的数据内容,即列车车号数据。一般UHF(特高频)频段的RFID的辐射范围为10 m,两侧距离则为20 m,列车以80 km/h的运行速度经过时,行驶时间约为1 s,按照地面安全计算机300 ms的运行周期计算,至少可以阅读3次RFID标签数据。
为了实现功能安全,UWB技术也承载车号识别的功能。当列车经过时,列车车次和车号数据通过UWB技术以约定的通信协议对外广播出去,地面锚点接收后可获得列车车号和编组数据。
3.4 列车完整性判断分析
列车完整性判断基于车头和车尾之间UWB标签的距离。3.2节中,通过计算获得了线段AE和线段BF的长度,将线段AE、AB和BF的长度和与列车长度进行比较,若两者误差在合理范围内,则说明列车是完整的。除此之外,列车完整性判断也可以通过当前编组的所有车号进行判断。UWB和RFID依次获得经过的车厢车号,这些车号组成一个有顺序的数列,如果所有车号的顺序与ATS中存储的数据一致,则说明列车是完整的。

图5 UWB锚点与标签位置关系图Fig.5 Diagram of relationship between UWB anchor point and label position
3.5 列车行驶方向判断
轨道UWB锚点1车头标签C、车尾标签D的位置关系如图5所示。在确定列车完整性的基础上,L为定值,若列车定位准确,则L1和L2的测距正确。当L1
3.6 轨道占用检测分析
在列车定位、行驶方向判断及车号等信息皆可获取的基础上,可以识别轨道占用检测。当图3中的线段AE长度约等于0,且RFID阅读器只能获得车头的RFID标签时,说明列车开始进入下一个区段。当图3中的线段AF长度约等于0,且RFID阅读器仅能获得车尾的标签时,说明列车驶出了上一个区段,全部进入下一个区段。通过判断车头和车尾分别进入区段的情况,可以获得轨道占用信息。
3.7 智能轨旁对象控制器样机
通过上述方案设计分析,基于UWB和RFID技术的智能轨旁对象控制器能够满足车车通信后备模式下的应用,其控制样机已研制完成。智能轨旁对象控制器样机的整体尺寸为42 cm×35 cm×10 cm,功耗约为35 W,具有IP65(IP为侵入保护)防护等级。相对于传统计轴和轨道电路,智能轨旁对象控制器功耗和尺寸更小,可以更方便地部署在轨旁。目前,智能轨旁对象控制器样机在城市轨道交通通信与运行控制国家工程实验室进行了测试,测试结果验证了其可以实现双向列车定位、列车车号识别、列车完整性判断、列车行驶方向判断和轨道占用检测等功能。
4 结语
基于各研究机构对智能感知技术、UWB和RFID技术的相关研究,本文从功能安全的角度为出发点,设计了一套智能轨旁对象控制器系统,为车车通信后备模式提供了列车自动运行基础数据,实现了由OC和ATS控制列车的后备运行。车车通信的后备运行模式,是复杂的系统工程问题。本研究着重于地面传感部分的方案设计,实现了双向列车定位、车号识别、完整性判断、列车行驶方向判断以及轨道占用检测等功能。
