高超声速目标运动特性及其对预警系统的影响
2023-02-11郑建成谭贤四曲智国喻晨龙
郑建成,谭贤四,曲智国,喻晨龙
(1.空军预警学院 三系, 武汉 430019;2.中国人民解放军95246部队, 南宁 530007)
1 引言
当前,人们在谈到高超声速滑翔飞行器(hypersonic gliding vehicle,HGV)类临近空间高超声速目标时,多以定性描述其飞行速度快、机动性强、轨迹灵活多变等运动特性为主[1-4],这些描述并非不准确,但却容易给人造成一种错觉,认为这是一种全新的难以应对的武器。事实上,这类武器是在弹道导弹(ballistic missile,BM)基础上发展起来的新型武器,其飞行过程与BM既有相同点又有不同点,相同的是助推过程都是由火箭助推器助推到一定的高度和速度,不同的是后续飞行过程BM继续沿着抛物线弹道飞行,而HGV则在助推结束后快速进入大气层并作无动力滑翔,直至攻击目标[5-7]。因此,在描述HGV运动特性时,采用与BM对比的方式,更有助于人们认识这类目标的特点,厘清其与BM的真正区别,进而针对性的设计防御体系和措施。
从进攻方的角度看,国内学者多针对HGV轨迹灵活多变的特点,基于其复杂的动力学模型,专注于对其制导方法与轨迹优化策略的研究[8-11]。而从防御方的角度看,现有研究在对HGV与BM进行比较方面,多是直观给出两者在弹道高度上的差别[2-4,6,12],没有进行定量研究,理性认识不够。文献[13]虽然对两者运动特性作了定量比较分析,但其分析仅为性能特征层面,还不够细化,也没有进一步从防御方的视角分析现有反导预警体系应对来袭HGV存在的问题,而这一点对防御方来说是至关重要的。
针对BM防御,美国经过几十年的发展,构建了发展策略明晰、手段渐趋完备的反导防御体系[14],其针对BM的预警手段主要有红外和雷达,且有效性在2020年伊朗的报复性导弹袭击中得到了实战检验(美国反导预警体系在2020年伊朗的报复性导弹袭击中提供了6 min的从发现到预警的时间,使得在此袭击中美军无人阵亡)[15]。然而,由于HGV不同于BM的飞行高度和机动能力,现有反导预警体系在应对HGV时可能无法形成有效预警能力,急需对比分析两类目标运动特性的区别,进而分析HGV对现有反导预警体系带来的影响。为此,通过量化对比分析HGV与BM的运动特性,厘清两者的真正区别点,进而分析HGV对现有反导体系特别是预警体系带来的威胁和影响,并指出改进的方向,可为严格定量评估高超声速武器系统的威胁和制定防御策略提供依据。
2 运动模型
传统的BM进入高空自由段飞行时可近似为只受地球引力的作用,此时的飞行轨道是一种“二体”轨道,而HGV大气层内滑翔飞行除了受到自身重力和离心力作用外,还会受到气动升力和气动阻力的作用。在不考虑地球自转且假设地球为均匀圆球的条件下,可采用图1所示的三维视图来分析高超声速再入飞行器的运动性能。图1所示的几何模型给出了高超声速再入飞行器飞行弹道的侧视图(a)和俯视图(b),图中给出了该模型涉及的6个弹道变量:目标速度v、高度h、飞行速度与水平面之间组成的航迹倾角γ、飞行速度与纵程方向之间组成的航向角κ、纵向射程相对地心构成的弧度角Ψ和横向射程相对地心构成的弧度角Ω。
2.1 BM运动模型
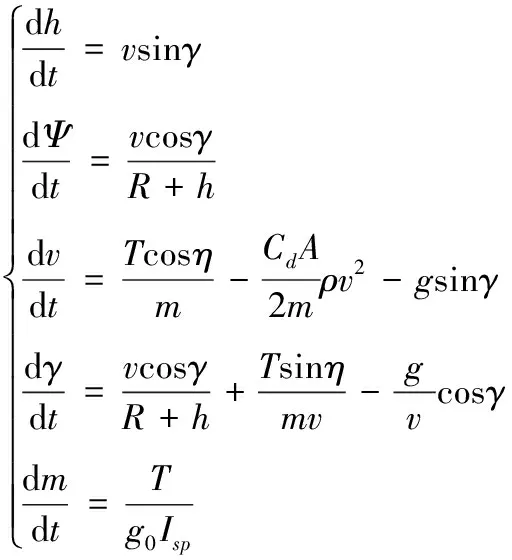
在不考虑地球自转的条件下,对于采用助推器发射的弹道导弹[16],采用图1所示几何模型其质心纵向平面运动方程可表示为:
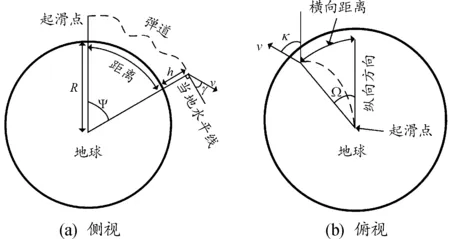
图1 高超声速再入飞行器弹道几何模型示意图
(1)
式中:R为地球半径;g=g0R2/(R+h)2为离地面h处的重力加速度;g0=9.8m/s2为海平面处重力加速度;Cd为阻力系数;A为飞行器的有效横截面积;ρ=ρ0exp(-h/H)为大气密度[17],ρ0=1.752kg/m3,H=6 700m;η为推力T与弹体轴的夹角;Isp为火箭发动机的比冲量;m为助推阶段导弹和再入飞行器的总质量以及在助推剂燃尽后单个再入飞行器的质量。
2.2 HGV运动模型
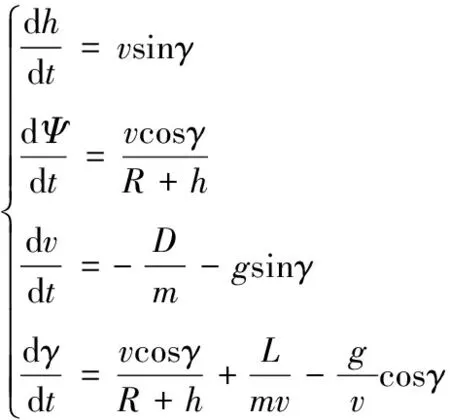
HGV为常规全球精确打击的潜在解决方案[18],其典型弹道可分为6个阶段:助推段、弹道段、再入段、爬升段、滑翔段和末段[1]。对于采用助推器发射的HGV,其助推段与弹道段可采用式(1)所示的质心运动方程,然而考虑到关机点之后推力为零,再入之后HGV还受到气动升力与气动阻力的影响,假设HGV倾侧角为0°,则由式(1)容易得到此时其质心再入运动方程为:
(2)
其中: m为再入飞行器质量;D=1/2ρv2CdA为气动阻力;L=1/2ρv2ClA为气动升力;Cl为升力系数。
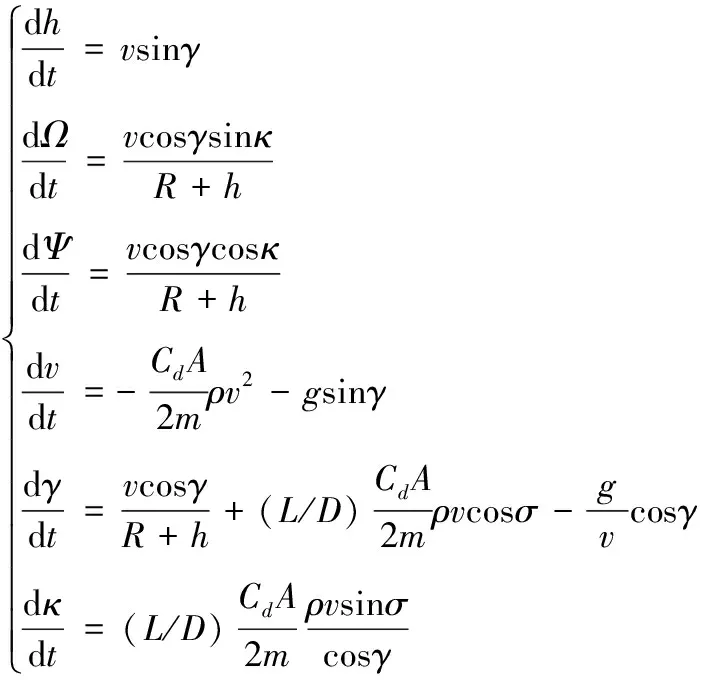
实际上,HGV滑翔飞行过程中会进行倾侧转弯以规避对手导弹防御系统。对升阻比一定的HGV,为更好地分析其滑翔段至末段的运动性能,同时考虑HGV机动飞行时进行倾侧转弯改变航向角κ,进而产生横向机动,结合图1和气动升力与气动阻力的表达式可知式(2)HGV质心再入运动方程此时应写为[13]
(3)
式中:样σ为飞行器的倾侧角。
同时,根据图1可知,在地球表面测量时飞行器的纵向射程和横向射程分别为
LZ=ΨR
(4)
LH=ΩR
(5)
因此,结合式(3)可知,当倾侧角σ=0°时,航向角κ为常数,HGV将保持固定的航向而不进行横向机动飞行;当航向角κ=0°时,横向射程最小,纵向射程最大,当航向角κ=90°时,横向射程最大,纵向射程最小,从而当HGV达到90°的航向角之后保持不变(即σ=0°)时将能获得最大的横向机动距离。
3 与BM运动性能比较及其影响分析
HGV的战略意义取决于其相对于BM的性能优势,后者目前在快速、远程弹头运载方面是最先进的[18]。高超声速飞行器关键的运动性能参数有纵向射程、高度、飞行时间、横向射程等,这些参数表征了其远程打击、低空突防、快速打击、侧向绕飞突防等能力。
3.1 仿真条件设置
与在类似或相同的火箭助推器上发射的BM一样,HGV也可以通过调整助推剂燃尽时间、速度等参数达到近程、中程、远程等不同的射程。作为鲜有公开披露大量技术数据的HGV,HTV-2代表了该技术的前沿[1],下面就以HTV-2作为HGV的典型代表与BM的运动性能进行数值仿真对比分析。为增加可比性,假设HGV与BM采用相同的Minotaur IV[20]型三级火箭助推器发射(该助推器已经被考虑将在美国部署的高超声速武器中使用[18]),仿真参数设置见表1。表1给出的HGV与BM质量均为1 000 kg,以便在助推剂燃尽时,两类飞行器表现出基本相同的速度。
表1 仿真参数
仿真时对HGV助推段和弹道段采用在HTV-2飞行测试中使用的轨迹进行分析[20],即采用式(1)所示的与BM相同的运动模型,再入段和爬升段详细解析处理见文献[5]对HTV-2飞行测试的分析,此处只根据其分析的结果给出示意性轨迹,在此基础上,HTV-2从距发射点约4 000 km开始滑翔,滑翔段轨迹采用式计算。根据式(1)对BM采用2种不同的弹道进行仿真分析[16]:一个是典型的最小能量弹道(minimum energy trajectory,MET),这是给定范围内能效最高的轨迹,弹头在落向目标前会在地球上空1 200 km处形成弧线;另一个是压低弹道(depressed trajectory,DT),该弹道在助推段以一个相对较大的角度转向纵程方向,缩短了导弹达到给定射程所需的总飞行路径长度,从而减少了飞行时间。HTV-2助推段与DT弹道导弹相似,但转向角度略大于DT弹道导弹。通过改变各级助推器推力与弹体轴的夹角η及其作用时间可以达到导弹的预期射程。表2给出了达到9 130 km纵向射程时3种不同弹道的导弹各级助推器推力与弹体轴的夹角η及其作用时间,表3给出了相应的关机点参数。
表2 夹角η及其作用时间
表3 关机点参数
3.2 飞行路径
HGV再入大气层后的滑翔飞行高度约20~100 km,而BM大部分飞行时间都处于外大气层,弹道高度可达100~2 000 km。采用上述仿真条件,图2给出了HGV和BM纵向射程均为9 130 km时的弹道轨迹的仿真结果。图2(a)是完整的弹道,图2(b)是助推段弹道,图2(c)是末段弹道。
由图2(a)可知,达到相同的纵向射程,MET弹道为大弧度的高空弹道,其飞行路径长度明显大于HGV和DT弹道飞行路径长度。从图2(b)可见,为了降低弹道高度,HGV和DT弹道导弹在助推段朝纵程方向进行了相对剧烈的转向,相较而言,HGV为获得更低的飞行高度,其转向角度更大。从图2(c)末段临近空间以下的弹道轨迹可见,弹道导弹穿过大气层时,MET弹道导弹轨迹与当地水平面的夹角较大,从而穿过大气层的路程更短,约251 km,DT弹道导弹轨迹与当地水平面的夹角较小,再入大气层后的飞行路程较MET弹道导弹要远,达1 469 km,是MET弹道导弹再入大气层后飞行路程的近6倍,而HGV再入后的飞行均处在大气层内,相较而言在大气层内飞行的路程更远,受大气阻力的影响更大。
图2 HGV和BM弹道曲线
3.3 飞行时间
上节分析指出,MET弹道大弧度的飞行路径长度明显大于HGV和DT弹道飞行路径长度,这将显著增加MET弹道导弹到达预期攻击区域的飞行时间,从图3给出的3类弹道从发射到落点的总飞行时间与纵向射程的关系也可看出,纵向射程相同时,尽管与MET弹道飞行的导弹相比,HGV的飞行时间具有一定的优势,但是其飞行时间不能与DT弹道导弹飞行的较短飞行时间相媲美,且DT弹道导弹在飞行时间方面的优势随着飞行距离的增加而愈发明显。
图3 飞行时间随射程的变化曲线
表4给出了纵向射程为7 500 km和9 000 km时,HGV、MET与DT弹道导弹的飞行时长。从表4可知,射程增加量相同时HGV与MET弹道导弹飞行时间增加量更多。简而言之,达到相同的纵向射程时HGV飞行时间比DT洲际弹道导弹飞行时间要长,与DT洲际弹道导弹相比,HGV并不能绝对更快地攻击目标。
表4 飞行时长
3.4 机动能力
与BM相比,HGV的性能优势之一就在于其滑翔时所作的横向机动飞行带来的突防能力较强[21]。虽然洲际弹道导弹在再入大气层后的临近空间区域也满足高超声速飞行的特点,但由于其基本沿着可预测的弹道轨迹飞行,机动能力和突防能力相对较弱[22-23]。对比第一节建立的HGV与BM运动模型也可以看出,该模型中BM并不存在横向机动,对此,图4给出了HGV与DT弹道导弹在前述仿真条件下采用相同助推器发射且纵向射程相同时的三维视图。为进一步分析HGV的机动能力,假设HGV初始速度Ma 20、初始高度80 km,图5、图6分别给出了不同倾侧角时HGV横向射程、速度随纵向射程的变化情况,表5给出了不同倾侧角时的横向射程和纵向射程。
图4 HGV与DT弹道三维视图
图5 倾侧角不同时横向射程随纵向射程的变化曲线
图6 倾侧角不同时速度随纵向射程的变化曲线
由图4可见,HGV除了达到与DT弹道导弹相同的 9 130 km的纵向射程外,还具备纵程达868 km的横向机动能力,并且机动过程中的轨迹是不规则的。根据前述对HGV运动模型的分析,其横向机动能力与倾侧角有关,倾侧转弯路径将随着倾侧角的不同而不同,如果它的倾侧角具备实时改变的能力,其机动路径将更加难以预测。图4给出的仅仅是HGV的某条可能轨迹,而从图5HGV的可达范围边界曲线可见,其最终打击范围将是约6 000 km(纵向)×4 000 km(横向)的可达域,明显不同于BM的“点”打击,这也彰显了HGV相较于BM所具有的独特突防能力与机动性优势。
然而,从图5、图6和表5可知,HGV横向机动距离的增加是以速度的更快下降和纵向射程的减少为代价的,这也证明了图3对飞行时间分析的正确性:飞行时间相同时HGV的纵向射程将会小于DT弹道导弹的射程。另外,由图5可知,一旦HGV飞行方向指向横向距离方向,倾侧角就重置为0°,从而使横程最大化。虽然HGV有可能达到可观的横向机动距离,但它必须滚动调姿才能机动转弯,从而将一部分升力转向横向射程方向,倾侧角越大,横向机动射程越远,而与重力作用相反的升力的相应减少,将导致倾侧角越大时速度下降越快(图6)。或者说,HGV可以通过在转弯时产生额外的升力来补偿升力方向改变造成的损失,而在升阻比L/D成比例约束下,这将同步增加阻力,从而降低飞行速度。正如Ivan[24]所指出的HGV滑翔阶段伴随的速度损失或阻力:在L/D不变的情况下,升力增加一倍,阻力也会增加一倍,HGV变慢的速率也会增加一倍,因为HGV没有推力补偿,所以即便是非常温和的机动转弯也会产生很大的阻力,从而影响飞行速度和射程。高加速度的急转,无论是为了躲避拦截器还是为了瞄准目标飞行,都将造成巨大的速度损失。
表5 不同倾侧角时的横向射程和纵向射程
3.5 对现有反导预警体系的影响
根据以上对HGV与BM运动性能的比较分析可知,HGV相较于BM飞行高度更低、飞行时间更长(对DT弹道)、减速更快但横向机动范围更广,给现有反导预警体系带来的影响如下:
1)全程探测困难多。对于HGV的助推段探测,由于助推过程与BM类似,现有天基红外高轨预警卫星对其具备预警能力;对于滑翔段探测,尽管中低轨预警卫星存在一定探测能力,但其覆盖范围有限,受成本和数量限制,目前不具备全域全程跟踪能力;对于末段探测,由于HGV飞行高度较BM要低,地/海基预警雷达受部署阵位和地球曲率的影响,仅能进行视距内探测,可提供的预警时间较短。
2)搜索捕获难度大。一方面,如上所述,HGV相较BM更低的飞行高低使得现有反导预警体系难以对其全程预警和全域探测;另一方面,HGV横向机动的灵活性和过大的可达范围必然增加防御方预警资源调度任务的艰巨性和分配运用的复杂性。
3)轨迹预测要求高。轨迹预测的效果很大程度上取决于目标的弹道外推模型。BM弹道运动基本符合二体运动规律,对其往往可以获得较高的轨迹预报精度,而HGV飞行弹道规划灵活,机动能力强且可以全程控制,加之防御方无法提前预知来袭HGV的型号、控制参数和制导规律,对其难以构建固定的弹道外推模型,从而很难对其未来时刻的机动情况进行预测与估计。
由此可见,利用单一防御手段或平台已无法对HGV形成有效预警能力。为了满足对HGV及早预警、全程探测和稳定跟踪的迫切需求,预警体系必须在平台上注重天基、空基/临空基等高平台的综合应用,在手段上注重红外与雷达探测设备一体化运用,在作战使用上注重组网协同探测。具体来看,一方面应着眼预警体系自身建设,探讨不同平台不同传感器的优化部署、调度管理以及交接协同,分析单传感器搜索参数调整优化、资源合理运用等;另一方面应着眼防御体系全局探究预警体系运用策略,考虑全杀伤链涉及的指挥控制结构、信息交互融合、拦截器性能等所有因素,综合指挥流程、阵地部署、作战协同等多方面构建统一数据库,积极探索信火一体、预警拦截一体的协同防御方案。
4 结论
1)由于不同于MET弹道导弹大弧度的飞行弹道,HGV低空大气层内飞行缩短了到达既定打击目标所需的飞行路程,减少了武器投送时间,但与DT弹道导弹相比,HGV攻击目标所需时间更长。
2)HGV凭借其低空飞行的优势,可以规避陆基雷达对其飞行早期进行预警探测,造成防御方的拦截响应时间相较BM更短,使拦截准备时间不够。
3)虽然HGV机动飞行会带来一定的速度损失和纵向射程损失,但大范围的可达域产生轨迹的不可预测性增加了现有反导预警体系对其捕获的难度。
4)HGV不同于BM的运动特性,使得现有反导预警体系应对HGV面临着全程探测困难多、搜索捕获难度大、轨迹预测要求高等难题。防御方需要在发展新型预警探测系统、构建空天地一体化的全域全程预警探测体系等方面对现有反导预警体系进行改进和完善。
