基于IUPF算法的三维无人机毫米波波束跟踪
2023-02-11张俊杰仲伟志张璐璐王俊智朱秋明
张俊杰, 仲伟志,*, 张璐璐, 王俊智, 朱秋明
(1. 南京航空航天大学航天学院, 江苏 南京 211106;2. 南京航空航天大学电子与信息工程学院, 江苏 南京 211106)
0 引 言
近年来,无人机凭借其优良的机动性、经济性及灵活性,在天气监测、自然灾害监测、交通控制、货物运输、应急搜救、通信中继等方面具有巨大的应用前景[1-5]。然而,传统无线通信系统所使用的6 GHz以下微波频段无法满足众多新兴应用领域的通信容量需求[6]。毫米波因拥有大量尚未利用的频带资源而受到人们广泛关注,可以为无人机通信网络提供丰富的频谱资源,以支持其实现高速数据传输[6-10]。但毫米波的频段较高,波长较短,因此易导致较大的路径损耗,尤其在雨、雪等天气下会产生极大衰减[11]。针对这一问题,研究者提出采用大规模阵列天线下的波束赋形技术来弥补毫米波的路径损耗[4, 12-13]。然而,无人机的姿态变化、飞行轨迹变化等都可能导致波束失配,严重影响通信质量[14-15]。因此,需要采用有效的波束跟踪来确保通信质量[16-19]。
目前,针对毫米波波束跟踪的相关研究有很多。在静态场景下,文献[20]提出一种新颖的辅助波束对(auxiliary beam pair,ABP)方法来获得发射角(angle-of-departure,AoD)和到达角(angle-of-arrival,AoA)的准确估计,但该估计算法需要对信道进行全方位扫描。文献[18, 21-23]提出了一类基于扩展卡尔曼滤波(extented Kalman filter,EKF)的波束跟踪方法,有效地提高了角度跟踪的精度,但该类方法是通过对非线性函数方程进行近似线性化处理,得到一个线性化模型来实现角度估计的,在一些高度非线性的情况下可能会导致滤波器发散,影响跟踪精度。文献[24-25]提出了一类基于无迹卡尔曼滤波(unscented Kalman filter,UKF)的波束跟踪方法,该类方法通过一个高斯分布对非线性方程的概率密度进行近似,从而能够有效地解决EKF跟踪方法遇到的问题,但如果系统是非高斯环境,该方法极易产生较大的误差。文献[26]提出一种基于粒子滤波(partical filter,PF)的二维跟踪算法,通过寻找一组在状态空间中传播的随机样本来近似表示概率密度函数,用样本均值代替积分运算,获得系统状态的最小方差估计,该方法能有效地解决UKF跟踪算法遇到的问题,但该方法存在粒子退化问题,会导致波束跟踪性能下降。
针对上述问题,本文提出一种基于改进无迹卡尔曼PF(improved unscented Kalman particle filter, IUPF)算法的无人机三维毫米波波束跟踪方法。该方法在三维毫米波波束跟踪模型驱动下,利用IUPF算法,在有效解决粒子退化问题的同时,进一步优化了粒子权重,从而提高了波束跟踪精度,实现了无人机三维环境下的波束精确跟踪。
1 系统模型
1.1 三维传播模型
本文假设了一个支持无人机的毫米波通信系统,该系统由无人机基站和地面用户组成。在下行链路中,无人机作为发射端,地面用户作为接收端。在接收端和发射端分别配备一个具有Mr×Nr和Mt×Nt根天线的均匀平面阵(uniform planar array, UPA),阵列天线间距为载波波长的一半。无人机三维通信系统模型如图1所示,假设阵列为设置在x-y平面内的UPA,其中φ和θ分别表示水平域和垂直域的相位。
假设信道为时变信道,收发两端均采用混合波束成形系统,且只有一个射频链,在k时刻由Lk条路径组成的信道模型[27-28]可表示为
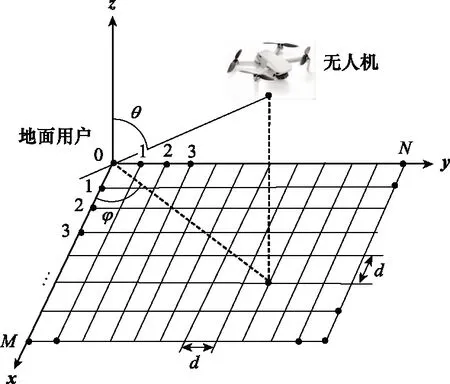
图1 无人机三维通信模型Fig.1 Unmanned aerial vehicle three-dimensional communication model
(1)
a(φ,θ)=aa(φ,θ)⊗ae(φ,θ)
(2)
其中
(3)
式中:ξ=sinφsinθ;τ=sinφcosθ;⊗是克罗内克积;λ是载波波长;d是阵元间距。
当发射端采用波束成形向量fk,接收端采用波束合并向量wk时,地面用户第k个时刻的接收信号可表示为
(4)
式中:vk为第k个时刻均值为0的加性高斯白噪声。
由于毫米波信道的主要能量集中在视距路径(line-of-sight,LOS)[29-30],因此接收信号可简化为
(5)
其中,波束成形向量fk和波束合并向量wk可分别表示为
(6)
(7)
1.2 空间状态模型
根据上述无人机毫米波信道模型,建立空间状态向量Xk:
(8)
AoA和AoD的状态更新方程由高斯过程噪声驱动,可表示为
Xk=Xk-1+nk
(9)

1.3 无人机飞行模型
本文引入笛卡尔坐标系来描述无人机的物体状态和行为参数。首先,建立如图1所示的坐标系,则无人机在t时刻的坐标则可用[X(t),Y(t),Z(t)]表示,无人机与Z轴之间的距离可表示为
(10)
无人机与地面用户之间的距离可表示为
(11)
则接收端ZOA和EOA可分别表示为
(12)
(13)
其在一个时隙内的变化量可分别表示为
Δφ=φ(t+1)-φ(t)
(14)
Δθ=θ(t+1)-θ(t)
(15)
2 基于IUPF的波束跟踪算法
在上述无人机毫米波信道模型以及所建立的空间状态模型基础上,本文提出一种基于IUPF的三维波束跟踪算法,如图2所示。
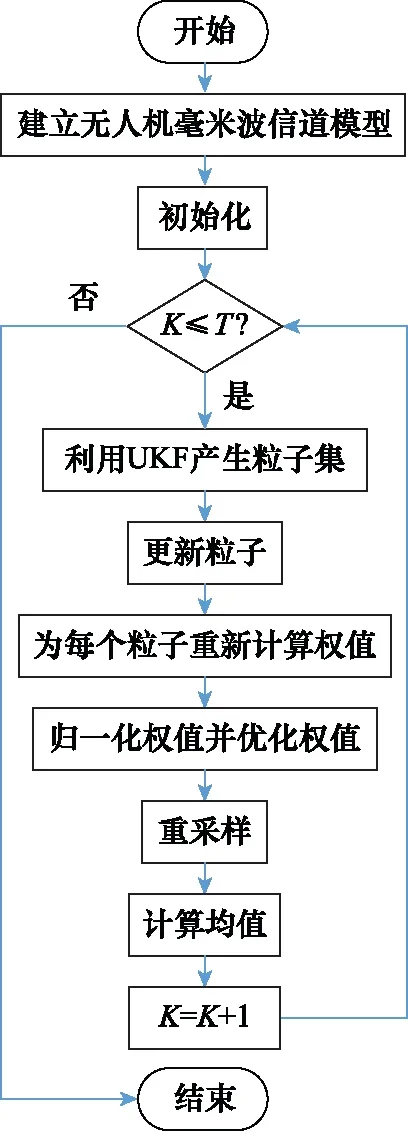
图2 三维IUPF波束跟踪算法流程图Fig.2 Folw chart of three-dimensional IUPF beam tracking algorithm
以往参考文献中的基本PF跟踪算法中涉及的PF是分析非线性动态系统的有效方法,其估计精度可以近似最优。但是,PF算法中粒子权值的方差会随着时间迭代而不断增加,这会导致粒子的退化问题,进而造成计算资源浪费以及估计结果不准确。而无人机场景下的姿态变化、快速运动等因素会加重这一粒子退化问题。目前,可以采取3种方法来解决粒子退化问题:增加粒子数、重采样技术以及选择合理的建议密度[29]。增加粒子数目会显著增加算法的运行时间,因此本文采用将重采样技术与选择合理的建议密度相结合的IUPF算法,该算法通过利用UKF建立建议密度分布函数,对粒子的权重进行优化,从而有效地解决了粒子退化问题,进而提高了波束跟踪精度。
2.1 利用UKF建立建议密度分布函数
IUPF算法中的建议密度函数能够使采样的粒子最大程度地符合先验分布,提高粒子的有效性,使粒子在多次迭代后仍然能够具有良好的权值,从而有效地减少无人机毫米波系统计算资源的浪费。

(16)

获得Sigma点集后,计算点集中相应点的权重:
(17)

(18)
(19)
(20)
式中:[·]T表示矩阵或向量的转置。
(21)
(22)
(23)
(24)
式中:R是观测噪声,主要由信噪比(signal to noise ratio,SNR)决定。
计算卡尔曼增益:
(25)
(26)
(27)

2.2 优化粒子权重
传统的重采样过程有效抑制了粒子退化,可以解决粒子权重偏差过大的问题,从而一定程度上提高了跟踪角度精度。然而,传统的重采样方法在简单重复复制大权值粒子的同时丢弃小权值粒子,导致了粒子多样性的缺乏,进而影响了滤波结果的正确性,使波束对准精度下降。针对上述问题,本文采用了一种权重优化的方法,调整归一化粒子的权重,增加小权值粒子的权重比例,降低大权值粒子的权重比例,从而增加粒子的多样性。本文采用的权重优化方法在具体实施过程中需要引入一个影响因子,将其加入归一化的权重中。调整粒子权重,有效地提高了粒子的多样性,从而提高了角度跟踪精度。
(28)
而后,计算每个粒子的权值:
(29)
再引入权重影响因子α,求得归一化粒子权重:
(30)
式中:0<α<1;N表示粒子数目。
(31)
最后根据式(31)进行状态估计:
(32)
Xk即是发射端波束形成器和接收端波束合成器的当前信道角度矢量的最终估计。此外,无人机毫米波网络重复了第2.1和第2.2节描述的波束跟踪过程,并随时间更新每个时刻经过滤波的AoA和AoD。
3 仿真实验
为了验证基于IUPF的三维波束跟踪算法的性能,本文分别从权重影响因子α、SNR、阵列尺寸、角度方差等方面对算法进行仿真计算,并与基于EKF和UKF的三维波束跟踪方法进行对比。仿真中无人机的初始位置为(100,200,100)m,假设在X,Y,Z3个方向的初始速度分别为10 m/s,10 m/s,5 m/s,在X和Y方向上的加速度分别为2 m/s2,3 m/s2,Z方向上加速度为0[31]。由此可以计算出每个时隙内,由于无人机的轨迹变化带来的EOD,AOD的变化量。经仿真计算,最大变化量不超过0.15°。但是无人机在实际飞行过程中,由于外界因素以及自身的一些抖动会导致该角度的变化量增大。因此,本文仿真过程中将角度的变化方差设定为(0.5°)2。
假设波束的初始状态已知,为了实现无缝跟踪,本文假设通信路径中没有阻塞。每次仿真包含100个时隙,并在参数相同的情况下进行1 000次仿真,仿真参数设置如表1所示。
表1 仿真参数
3.1 权重影响因子
本节讨论权重影响因子α对IUPF波束跟踪算法的影响,仿真参数设置如表1所示。三维跟踪算法涉及4个角度的跟踪,由于4个角度的变化情况相似,因此此处只以EOA的变化情况为例。图3显示了权重影响因子α=0.1,0.2,0.3,0.5,0.8下,跟踪角度的均方误差(mean square error, MSE)随时间的变化情况。
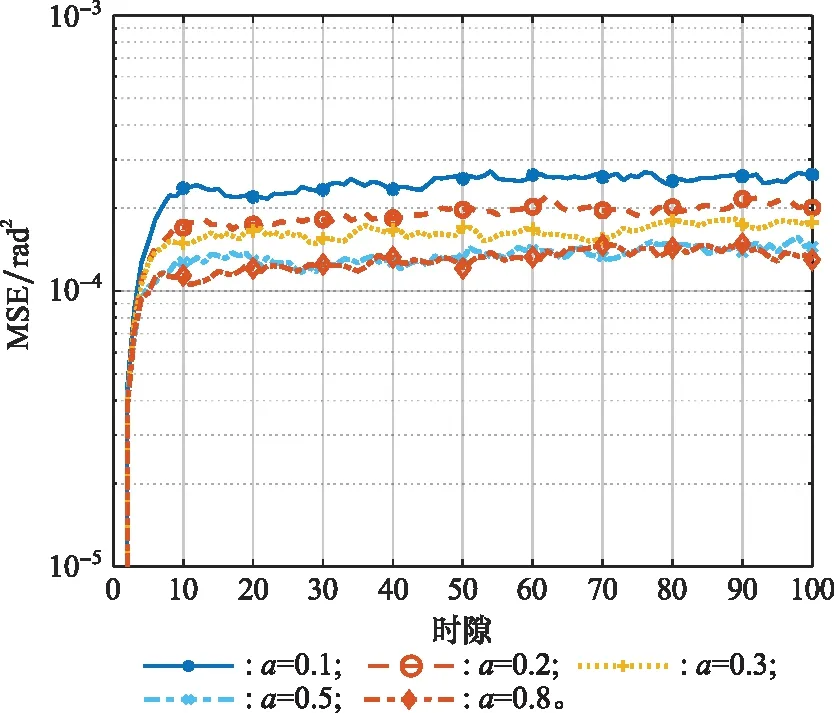
图3 不同权重影响因子下EOA的跟踪MSEFig.3 Tracking MSE of EOA with different weight impact factors
如图3所示,α=0.8时IUPF的MSE最小,即此时跟踪性能最优,滤波后的角度与真实的角度最相近。权重因子α的取值不能过小,因为如果α的取值过小,会使原本权重大的粒子权重变得过小,使原本权重小的粒子权重过大,这会使权值优化后的粒子权重与真实粒子有较大的偏差,导致角度跟踪的误差增大。但权重因子α的取值也不能过大,α过大会导致原本权重大的粒子经过权重优化之后权重依旧大,权重小的粒子权重依旧小,从而失去了权重优化的意义。本节中α=0.8是在本仿真条件下取得的较优结果,下面的几个仿真都在此权重因子下进行。
3.2 信噪比
SNR对IUPF跟踪算法的影响如图4所示。SNR分别设置为5 dB、10 dB、20 dB,其他仿真参数设置如表1所示。如图4所示,MSE随着SNR的增大而减小。
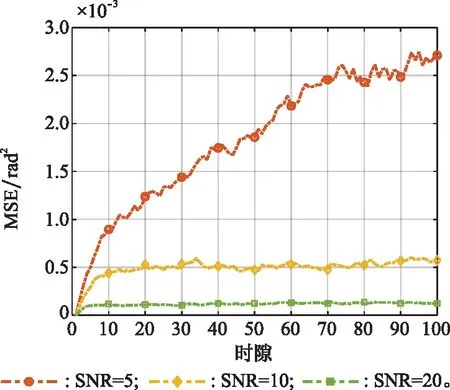
图4 不同SNR下EOA的MSEFig.4 MSE of EOA with different SNR
3.3 阵列尺寸
阵列尺寸大小对IUPF跟踪算法的影响如图5所示。发射端和接收端的阵列尺寸相同,大小分别为8×8,16×16,24×24,32×32四种情况,其他仿真参数如表1所示。
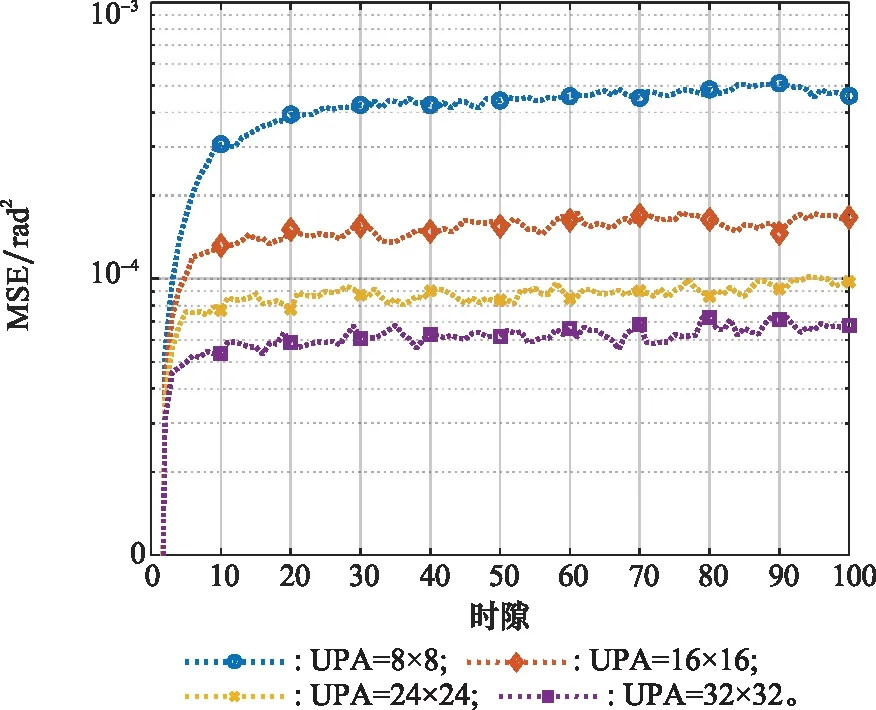
图5 不同阵列尺寸下EOA的MSEFig.5 MSE of EOA with different array sizes
如图5所示,MSE随着天线数量的增大而减小。这证明了算法对波束宽度的适应性较好。
3.4 角度方差
角度方差对IUPF跟踪算法性能的影响如图6所示。仿真参数设置如表1所示,图6显示了角度变化方差分别在(0.5π/180)2、(0.75π/180)2以及(π/180)2下EOA的MSE随时间的变化情况,角度方差为(0.5π/180)2时,MSE最小,这代表通信链路收发两端的角度在单位时间内的变化越小,跟踪精度越高。
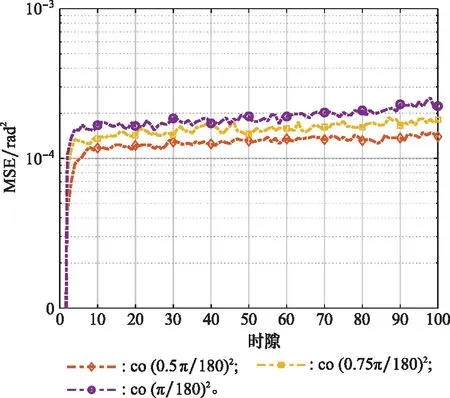
图6 不同角度方差下EOA的MSEFig.6 MSE of EOA with different angle variances
3.5 跟踪角度与真实角度对比
本节讨论当EOA和ZOA初始角度大小不一致时,经过IUPF滤波后的角度与实际真实的角度之间的差异。EOA和EOD的初始值为45°,ZOA和ZOD的初始值为20°,其他仿真参数如表1所示。
图7和图8显示了EOA和ZOA的跟踪角度与真实角度基本吻合。说明了在此条件下,本文算法的精度很高,与实际情况之间的误差很小。
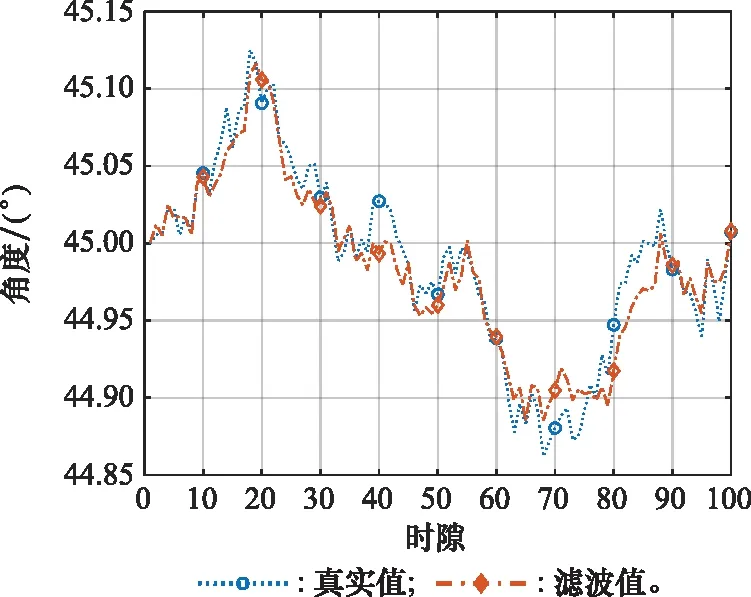
图7 EOA滤波角度与真实角度对比图Fig.7 Comparison of EOA filtered angle and real angle
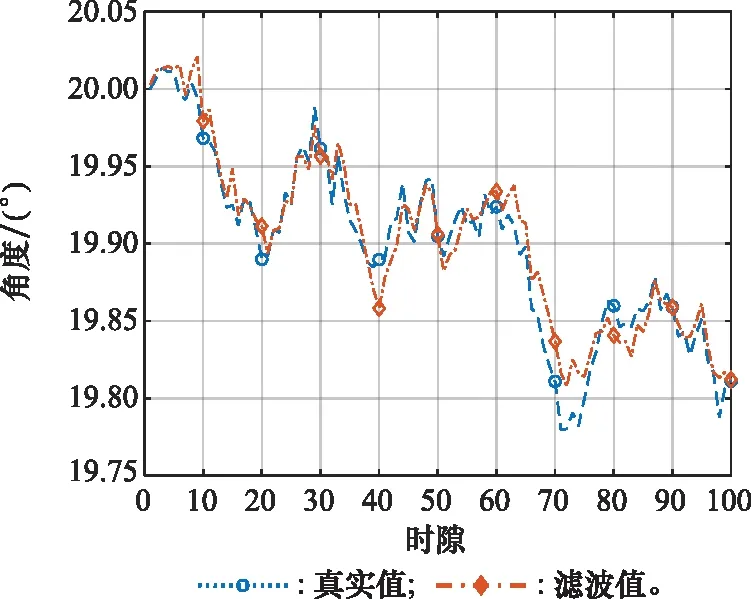
图8 ZOA滤波角度与真实角度对比图Fig.8 Comparison of ZOA filtered angle and real angle
3.6 不同跟踪算法之间的跟踪性能对比
基于IUPF的三维波束跟踪与传统的基于EKF、UKF算法的波束跟踪性能对比如图9所示,仿真参数如表1所示。仿真结果表明,基于IUPF的波束跟踪方法获得的MSE要明显小于基于EKF和UKF算法的波束跟踪方法,这是由于EKF是利用对非线性情况进行泰勒一阶展开而得到的一个线性化模型来进行状态估计的,在一些高度非线性的情况下会大大影响波束跟踪的精度。UKF是用UT变换得到的确定数量的Sigma点集来近似非线性系统的,其估计精度高于EKF。IUPF算法是利用一些离散随机采样点来近似系统随机变量的概率密度函数,以均值计算代替积分运算,且考虑了系统最新的观测信息,因此较其他算法具有更高的估计精度。
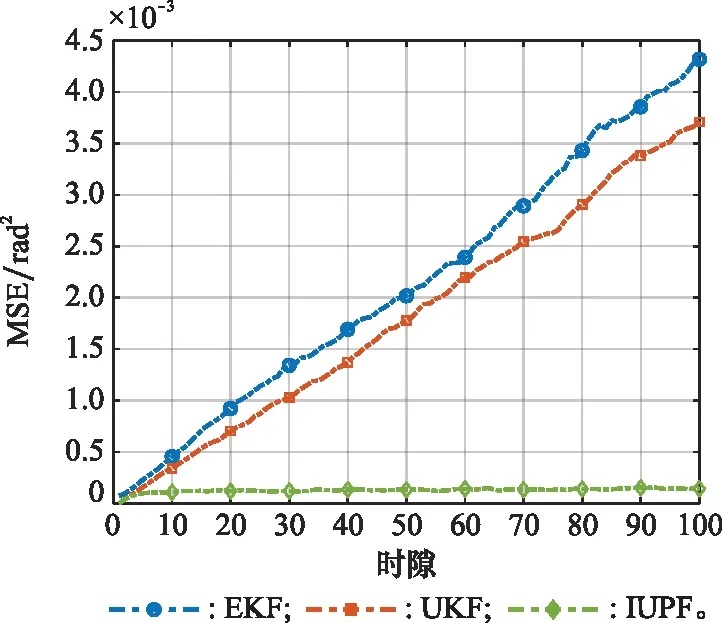
图9 EKF,UKF,IUPF算法下EOA的MSEFig.9 MSE of EOA with EKF, UKF, IUPF algorithm
4 结 论
本文提出了一种基于IUPF的三维无人机毫米波波束跟踪方法。该方法在无人机毫米波信道模型基础上,利用IUPF对发射端和接收端的角度进行估计,从而实现精确的波束跟踪。仿真结果表明,相较于基于EKF和UKF的波束跟踪方法,IUPF算法能够有效地减小角度跟踪的均方误差,提高角度跟踪的精度。但该方法的运算复杂度相对较高,在未来的工作中将着力降低算法的复杂度。