面向集群飞行的微小卫星姿态容差估计与快速精细控制方法
2023-02-09陈小前冉德超
陈小前,冉德超,曹 璐
(1.军事科学院,北京 100091;2.军事科学院国防科技创新研究院,北京 100071)
1 引言
随着微电子等技术的发展,微小卫星的“好、快、省”等优势凸显,催生了由微小卫星集群或大小卫星相结合操控太空碎片等非合作目标的低成本、高效能操控样式.近年来,美国等通过“黑杰克”与“星链”等计划充分展示了该操控样式的巨大优势.
微小卫星集群飞行过程中,对单星自身姿态的自主确定与快速控制是其开展空间操控行动的基础.受尺寸、重量、功耗等约束,与大卫星相比,一方面微小卫星的敏感器测量精度低、执行器控制能力有限;另一方面敏感器与执行器装配误差或环境不确定性等因素,导致微小卫星的姿态确定模型及动力学控制模型误差大.这两大因素使得微小卫星工程面临两大难题:一是姿态高精度确定难;二是对强时变姿态轨迹的快速、精确跟踪控制难.为此,必须设计先进的理论方法达到“以软补硬”的效果.
状态估计方法是姿态确定算法的核心,但是对于微小卫星姿态确定这一类复杂非线性系统,大卫星中常用的传统卡尔曼滤波方法由于对系统的模型及测量误差处理能力较弱,很难实现高精度姿态确定[1].为此,学术界提出了一系列基于非线性滤波器的姿态估计方法,如无迹卡尔曼滤波[2]、容积卡尔曼滤波器[3]、中心差分卡尔曼滤波器[4]等,它们分别采用了不同的高斯加权积分准则近似微小卫星姿态系统的后验概率分布,实现了相近的姿态估计精度.此外,稀疏高斯埃尔米特求积滤波在保持适中计算量的情况下,达到比无迹卡尔曼滤波、容积卡尔曼滤、中心差分卡尔曼滤波器更高的姿态估计精度[5].然而,这些滤波器均是基于严格的高斯噪声假设和确定性的系统模型设计而成,属于高斯近似滤波器范畴.但是,复杂的空间环境致使微小卫星的测量硬件系统极易产生错误的测量信息,测量噪声的统计特性服从厚尾非高斯分布.此厚尾非高斯测量噪声将导致经典高斯近似滤波器的姿态估计性能下降,甚至产生发散现象.
为解决厚尾非高斯噪声下的状态估计问题,文献[6]设计了一种不依赖于噪声特性的粒子滤波器,但该滤波器的计算量大.文献[7]设计了一种能够处理非高斯噪声的高斯和滤波器,但是它计算量大,且依赖噪声模型.文献[8]将非高斯噪声建模为Student’s t分布,并提出了一种野值鲁棒滤波估计方法,但是它同样依赖噪声模型,难以选择合适的自由度参数来适应未知的非高斯噪声.为实现不依赖噪声模型的状态估计,学术界提出了广义极大似然估计方法[9]来处理异常值.信息理论中的熵准则被广泛引入至广义极大似然估计方法中,实现了比Huber方法具有更强鲁棒性的状态估计性能.最小误差熵准则虽然具有平移不变性,但无法将误差概率密度函数固定在原点处.带有基准点的最小误差熵准则(也称中心误差熵准则)在稳定性和鲁棒性方面比最大相关熵更有优势,在野值鲁棒滤波中具有更好的状态估计性能[10-11].
为了提高控制速率,学术界提出了有限时间姿态控制方法[12-13],在有限时间内实现姿态控制误差,收敛到原点或原点附近的小邻域.相比于渐近稳定控制方法,虽然该方法具有更短的姿态控制收敛时间,但是收敛时间与姿态初始状态有关,且依赖于控制参数.为此,学术界提出了预定时间姿态控制方法[14-15],该方法预先指定一个常数值来确定姿态控制收敛时间.结合预设性能控制方法,文献[16]在控制器的设计过程中,使用指定时间的性能函数设计了预设性能控制器,保证姿态跟踪误差始终保持在预设的区域内.文献[17]为了实现扰动下的卫星预定时间姿态机动,设计了一种干扰观测器,并将干扰估计值综合到姿态跟踪控制中,主动抑制外部扰动对控制系统带来的影响.文献[18]设计了一种基于指定时间干扰观测器的指定时间姿态跟踪控制器.
现有的状态估计方法虽然能够实现大模型误差下的微小卫星姿态高精度估计,但是大多计算复杂,难以实现估计精度与微小卫星有限算力的平衡.此外,大多数的姿态预定或指定时间控制方法并未考虑执行器能力受限问题,而该受限能力将严重影响微小卫星对姿态轨迹的快速跟踪控制性能.为此,本文提出了一种微小卫星姿态容差状态估计与快速精细跟踪控制方法,该方法的主要创新包括:
1)设计了一种中心误差熵稀疏高斯埃尔米特求积滤波器,“容差”估计微小卫星姿态确定系统的模型误差并对系统进行修正,提高了状态估计的鲁棒性,并利用稀疏网格求积准则近似非线性积分问题,解决了非线性非高斯系统的状态高精度估计问题.相比文献[19]提出的滤波方法,本文的中心误差熵稀疏高斯埃尔米特求积滤波器提升了18.52%的姿态估计精度.该方法不仅适用于微小卫星单星的姿态估计,也可用于微小卫星集群中星间相对位姿状态的高精度估计.
2)设计了一种预定时间姿态跟踪精细控制器,在预定时间内精确估计,并精细补偿了姿态动力学模型误差,并在执行器控制能力受限条件下实现了对高动态强时变姿态轨迹的预定时间跟踪控制.该方法同时处理了执行器能力受限与预定时间控制问题,最大程度挖掘了执行器的执行能力,且完成姿态跟踪操作的时间可预先给定,不依赖状态初始值.当不考虑执行器控制能力受限时,该方法与文献[20]提出的预定时间控制方法,可以实现一致的姿态控制精度与控制速率.当显式考虑执行器控制受限问题时,本文提出的预定时间姿态跟踪精细控制器相比文献[20]提出的预定时间控制方法,其姿态跟踪控制速率提升了60%.
2 预备知识与问题描述
2.1 微小卫星姿态跟踪控制系统模型
本文用修正罗德里格参数δ=[δ1δ2δ3]T描述微小卫星的本体系相对于惯性系的姿态[21].为实现姿态控制,记期望姿态δd=[δd1δd2δd3]T,则微小卫星的姿态跟踪控制系统可建模为
2.2 稀疏高斯埃尔米特求积滤波器
针对离散的非线性系统为
式中:xk ∈Rn为系统状态;zk ∈Rm为系统的输出测量值;f(·)与h(·)分别为状态函数与测量函数;wk-1和νk分别为独立的零均值高斯系统噪声和测量噪声,且它们的协方差分别为Qk和Rk.针对系统(4),基于确定性采样和求积准则的滤波步骤如下:
步骤1预测过程.
步骤2更新过程.
步骤3后验状态均值和协方差被更新.
2.3 相关定义
不考虑系统及测量噪声,针对离散的非线性系统(4)对应的连续系统的状态方程为,f(0)=0,其中x(t)∈Rn表示该连续系统的状态.
定义1若上述连续系统在邻域U ⊂Rn内是Lyapunov稳定的,且对预先指定的时间常数Ta,若当t>Ta时,对任意的初始状态x(0),均有x(t)=0恒成立,则称该系统是预定时间稳定的.
2.4 问题描述
面向微小卫星集群飞行任务,针对预设定的姿态操作时间T>0与任意的初始姿态δ(0)与初始角速度ω(0),考虑大模型误差对微小卫星姿态控制性能的影响与执行器能力受限τi,min≤τi≤τi,max,i=1,2,3,其中τi,max与τi,min分别为执行器的最大、最小控制能力,设计鲁棒性强的状态估计方法实现姿态与角速度的高精度估计,同时设计姿态控制器τ在预定时间T内实现对高动态、强时变期望姿态δd的高精度跟踪控制,即对任意的t≥T,有δe=0成立.
3 状态容差估计方法
在本小节中,将对系统及测量噪声均为非高斯噪声的非线性系统(4),提出一种容差估计方法实现对状态xk的高精度估计.该估计方法的核心在于设计一种中心误差熵稀疏高斯埃尔米特求积滤波器.该滤波器包含时间更新及量测更新步骤,其时间更新与稀疏高斯埃尔米特求积滤波器相同,其测量更新根据中心误差熵准则重新设计.测量更新方程包含回归模型建立和后验状态更新两个步骤,具体如下.
步骤1回归模型构建.
定义一步预测误差为
并将量测方程zk=h(xk)+νk线性化近似为
式中
且其协方差为
步骤2基于中心误差熵准则的后验状态更新.
中心误差熵准则一般表示为
对上式计算梯度并令其等于0,可以得到
式(21)中的状态后验更新可以被继续推导为类似卡尔曼滤波的递推形式,即
式中:
后验协方差更新表示为
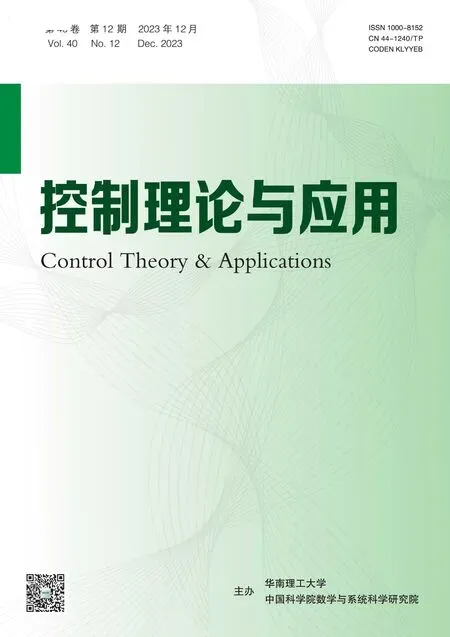
至此,可将中心误差熵稀疏高斯埃尔米特求积滤波器的算法步骤总结如表1所示.该算法是基于一类通用的非线性系统(4)设计而成.非线性系统(4)既可以用来描述单个微小卫星的姿态确定与控制系统,也可以用来描述微小卫星集群中星与星之间的相对位姿动力学.因此,表1可以应用微小卫星集群中星与星之间的相对位姿估计,实现相对位姿状态的容差、高精度估计.
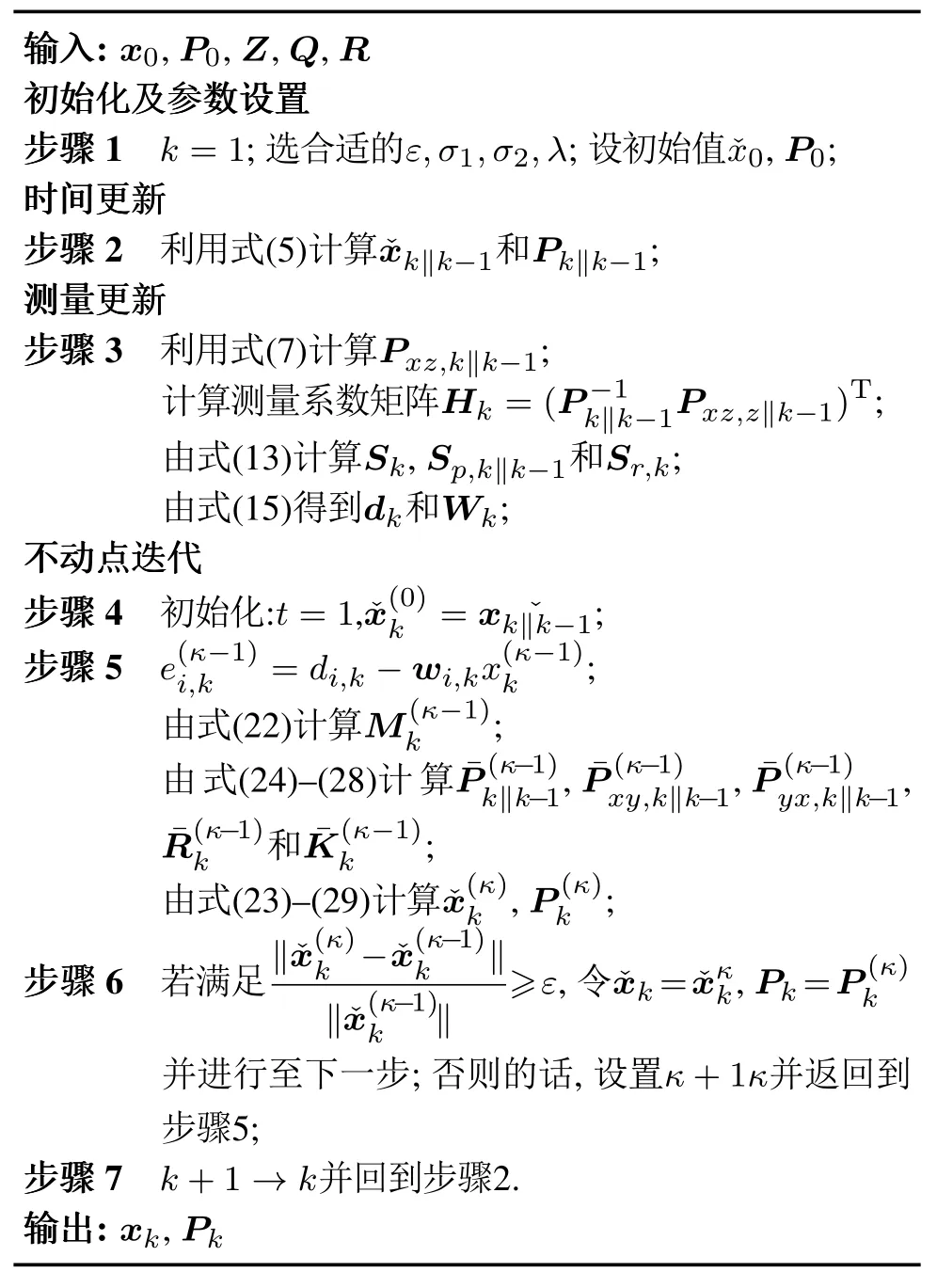
表1 中心误差熵稀疏高斯埃尔米特求积滤波器Table 1 Central error entropy sparse Gaussian Hermi-______tian quadrature filter
4 姿态快速精细跟踪控制方法
由于Φ(δe)是可逆矩阵,此时令Z=Φ-1(δe),则式(1)可转化为
针对微小卫星的执行器控制能力受限问题,设计姿态控制器为
式中:u=[u1u2u3]T∈R3为该控制器的控制输入,当i=1,2,3,satui被定义为
引入变量ς=[ς1ς2ς3]T=u-τ,则式(32)可改写成为
式中dF=-Ψς+d是未知的,它表示作用于微小卫星姿态控制系统的综合干扰力矩项.
针对转化的姿态跟踪控制系统(35),本小节将提出一种姿态快速精细跟踪控制方法实现姿态的预定时间控制,该方法由一种预定时间观测器与一种预定时间姿态跟踪控制器组成,两者的具体设计如下所述.
4.1 预定时间观测器设计
为了消除式(35)中的综合干扰力矩项dF对姿态跟踪控制精度的影响,本文将设计一种预定时间观测器估计dF,然后在姿态控制器设计补偿控制量补偿dF.为此,引入一个新变量xa∈R3,且xa满足
定理1设计综合干扰项dF的估计器为
4.2 预定时间姿态跟踪控制器设计
定理2针对由建模误差与外部干扰引起的不确定力矩τd与执行器能力受限τi,min≤τi≤τi,max作用下的微小卫星姿态跟踪控制系统,采用姿态控制器(33),若设计其控制输入u为
则仅需设定观测器(38)的收敛时间T1<T,此时姿态跟踪误差δe与角速度跟踪误差ωe是预定时间稳定的,两者将在预定时间T内收敛至原点,对t≥T,有δe=0与ωe=0成立,即微小卫星姿态δ将在预定时间T内跟踪上期望姿态δd.
证根据文献[22]则有如下不等式成立:
V2两边对时间求导数并把式(35)代入可得
进一步地,利用不等式
可化简式(46)为
注2预定时间姿态控制器(42)的正常数δ需满足不等式δ≥从而保证ρ=0.5.为此,姿态控制器(42)的控制参数可按照如下方式选取: 首先,非合作目标操控任务需求确定姿态跟踪控制时间常数T.然后,结合V2(0)选择合适的正奇数q1<q2,以确定δ的值,并使其满足
此外,考虑到V2(0)和姿态控制系统的初始状态值相关,可能会出现V2(0)=0的情况.为此,在工程中可以在初始时间段施加小的激励信号来避免这种情况的发生.
5 仿真校验
为验证上述容差估计与快速精细控制方法的有效性,把该方法应用于某型微小卫星姿态确定与控制系统进行了仿真验证.该微小卫星的标称转动惯量为轨道角速率为ω0=0.0012 rad/s,三轴上的控制能力范围为τi,max=0.15 Nm与τi,min=-0.15 Nm,i=1,2,3.该卫星配置了陀螺仪以测量其角速度,并采用星敏感器测量姿态,其中陀螺仪的测量模型为ω=ωg-b-ηg和其中:ωg为陀螺仪的测量值;b为陀螺仪的漂移变率;ηg和ηb为不相关的零均值高斯噪声;其协方差分别为
以姿态,角速度和陀螺漂移作为姿态确定系统的状态,即x=[δTωTbT]T,则微小卫星的姿态确定系统方程为
通过采样将姿态确定系统(50)转化为式(4)的形式,其中测量方程为星敏感器的测量方程:δopt=δ ⊗δn,式中:δopt为星敏感器的测量输出修正罗德里格参数;δn为星敏感器的测量噪声修正罗德里格参数.此时,可使用表1估计微小卫星的姿态.
5.1 微小卫星姿态容差估计仿真验证
假设陀螺常值漂移为b(0)=[1 1 1]T(°)/h,陀螺随机噪声为σg=0.5(°)/h与σb=0.5(°)/h.为了验证容差估计方法的有效性,在仿真中本文设计的滤波器(center error entropy sparse Gaussian Hermite quadrature filter,CEESGHQF)与经典的稀疏高斯埃尔米特求积滤波方法(sparse Gaussian Hermite quadrature filter,SGHQF),文献[19]提出的滤波方法(maximum correntropy sparse Gauss Hermite quadrature filter,MCSGHQF)进行了对比.星敏感器测量噪声被设置为如下两种情况.
在情况1中,上述3种方法获得的三轴姿态角估计的平均均方根误差(average root mean square error,ARMSE)见表2.在理想的高斯测量噪声下3种方法有相类似的估计精度,都有很小的估计误差,估计精度均已达到0.001度的量级.因为经典的SGHQF方法是MCSGHQF方法在参数σ →∞和本文设计的CEESGHQF方法在参数λ=1,σ1→∞时的特例.
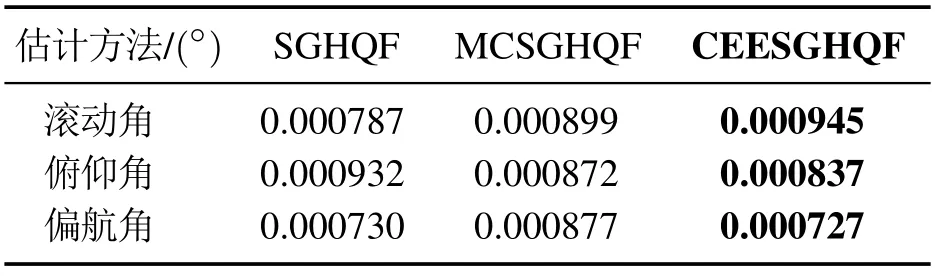
表2 情况1下采用各算法得到的三轴姿态角ARMSETable 2 Three axis attitude angle ARMSE obtained by each estimation approach in Case 1
在情况2中,为了平衡精度和稳定性,MCSGHQF的参数被设置为σ=25,CEESGHQF 的参数被设置为λ=0.99,σ1=3,σ2=20.表3给出了各个方法估计的三轴姿态估计的平均均方根误差.使用上述3种方法所得到的姿态估计均方根误差如图1所示.

图1 情况2下三轴姿态角的稳态均方根误差Fig.1 RMSE of steady-state three-axis attitude angle estimation in Case 2

表3 情况2下采用各算法得到的三轴姿态角ARMSETable 3 Three axis attitude ARMSE of each estimation approach in Case 2
从结果中可以看出,经典SGHQF方法在非高斯噪声下估计精度较差,稳态精度在0.1度量级.此外,从图2可知,MCSGHQF方法具有更强的鲁棒估计性能,微小卫星的三轴姿态的估计精度相比SGHQF方法分别提高了72.83%,75.85%和72.66%.然而,本文设计的CEESGHQF方法,由于中心误差熵准则的优越性展现出了更加平稳的滤波性能和更高的估计精度,相比较MCSGHQF三轴姿态的确定精度分别提高了18.52%,23.87%和26.78%.此外,CEESGHQF方法增强了经典的SGHQF方法的鲁棒性,有效降低环境干扰,传感器异常等带来的冲击噪声影响,提高了存在异常测量误差情况下的姿态确定精度.同时,在理想高斯噪声情况下,所提出鲁棒算法也能在合适参数下逼近经典SGHQF方法的精度.
图2 情况2下稳态三轴姿态角估计平均的均方根误差Fig.2 ARMSE of steady-state three-axis attitude angle estimation in Case 2
5.2 微小卫星姿态快速精细跟踪控制仿真验证
在微小卫星姿态跟踪控制仿真中,选取控制器(42)的控制参数为m1=0.7895,p1=1.4615,β1=0.2,β2=0.5,q=并令姿态初始值为δ(0)=[0.0126-0.00131-0.0145]T,角速度的初始值为ω(0)=[0 0 0]Trad/s,姿态跟踪操作时间预设定为T=15 s,观测器的收敛时间预设定为T1=2 s,且期望姿态与外部干扰分别设定为
式中γ=‖δe‖.
当应用控制器(42)于该型微小卫星的姿态跟踪控制任务时,姿态的跟踪误差如图3所示.姿态跟踪误差在预定的收敛时间T=15 s内收敛.此外,如图4所示的综合干扰项估计误差可知,设计的观测器能在预定时间T1=2 s内估计出综合的外部扰动项dF.使用本文设计的控制器(42)能够保证微小卫星顺利跟踪上期望的姿态,并且在姿态跟踪过程中,控制力矩始终在执行器的控制能力范围-0.15≤τi≤0.15 Nm内,i=1,2,3,如图5所示.因此,本文设计的预定时间控制器能有效克服外部扰动力矩以及执行机器能力受限给控制系统带来的负面影响.
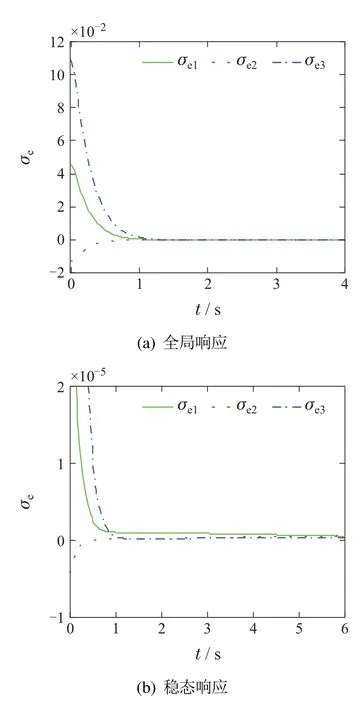
图3 控制器(42)作用下的姿态跟踪误差Fig.3 Attitude tracking error under the controller(42)

图4 干扰观测器(37)的干扰观测误差Fig.4 Disturbance observation error of the observer(37)
为进一步验证本文设计的快速精细姿态跟踪控制器(42)的有效性,该控制器与文献[20]提出的预设时间姿态控制方法进行了对比仿真试验.当不考虑执行器控制能力受限问题时,两种方法能够实现一致的姿态跟踪控制精度与控制速率.当考虑执行器控制能力受限时,由于文献[20]未能显式处理执行器能力受限问题,因此其姿态跟踪控制速率将下降,如图6所示,在5 s内完成姿态跟踪操作.而本文提出的预定时间姿态跟踪精细控制器将在2 s 内姿态跟踪操作,相比文献[20]其姿态跟踪控制速率提升了60%.
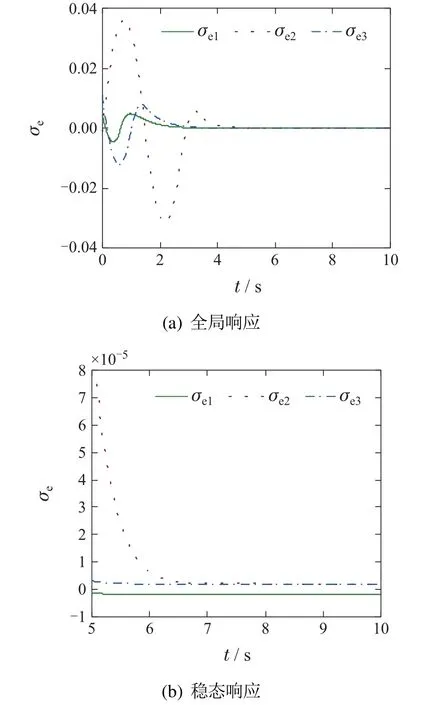
图6 使用文献[20]的控制方法获得的姿态跟踪误差Fig.6 Attitude tracking error under the controller in[20]
6 结论
面向微小卫星集群飞行任务,针对模型误差大的微小卫星单星姿态确定及其控制问题,本文提出了一种容差状态估计与快速精细控制方法.该方法设计了一种中心误差熵稀疏高斯埃尔米特求积滤波器,容差估计并修正姿态确定系统模型误差的,在微小卫星有限的计算能力下实现了厚尾非高斯量测噪声下的姿态高精度估计,平衡了估计精度与算力.该滤波器应用于微小卫星集群状态估计时,可实现星间相对位姿状态的容差与高精度估计.同时,该方法设计了一种基于干扰观测器的预定时间姿态跟踪精细控制器,在执行器控制能力受限条件下实现了对高动态,强时变姿态的快速跟踪控制.
需要指出的是,在第5部分中容差状态估计方法与快速精细跟踪控制方法的性能是逐项而非一体化验证的.当它们应用于微小卫星姿态控制系统设计时,形成的闭环姿态控制系统如图7所示.因此,为了验证容差状态估计方法与快速精细跟踪控制方法的工程应用价值,下一步需进行就图7所示的闭环控制系统进行全数字及半物理仿真试验.
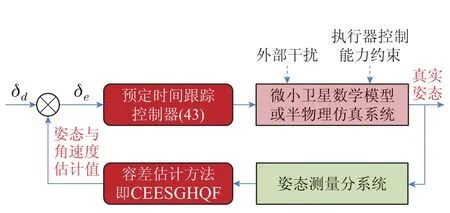
图7 本文提出的容差状态估计方法与快速精细跟踪控制方法作用下的卫星姿态闭环控制系统Fig.7 The closed-loop attitude tracking control architecture from the proposed state tolerance estimation and fastly precise control approach