坐骑式割草机后翻工况驾驶员伤亡程度的研究
2023-02-09王新彦刘琬玥
王新彦,刘琬玥
(江苏科技大学机械工程学院,江苏镇江 212000)
1 引言
美国航天局卫星数据表明,在2000年到2017年期间,全球绿化面积增长迅速,尤其是中国,贡献率高达四分之一。绿化面积的增长促进了割草机产量的增长,也对其通用性、安全性和智能化水平提出了更高的要求。安全性一直都是人们关注的重点与第一要素,而对于割草机在复杂工作路面容易出现失稳倾翻的状况,更要求我们对割草机驾驶员进行更加完善的保护。
车辆安全分为主动安全性与被动安全性,现如今对于主动安全性的研究居多,车辆的性能也在不断地完善,但在被动安全性方面仍有所空缺[1−2]。文章对割草机在斜坡遇障而发生的失稳倾翻进行研究,建立割草机模型,分析驾驶员在后翻30°斜坡工况下可能受到的伤害与对应损伤指标,并基于模型仿真对驾驶员损伤程度进行预测。
现阶段,分析车辆驾驶员损伤的方法有四种[3]:对现有的事故数据进行分析、用志愿者的遗体做翻滚碰撞分析、同比例的假人模型进行模拟实验、计算机软件建模并进行有限元分析与多刚体动力学分析。
在国外,研究发展史较早的发达国家对车辆驾驶员伤亡研究的力度和进展以及相关的车辆安全技术的研发更加完整,从理论到应用都比较完善[4−8]。2002年至2005年,文献进行了前驱割草机连续翻滚特性的研究。2009年文献收集了来自不同渠道的关于侧翻伤害的信息并且使用哈顿矩阵对它进行分析。2015年,文献建立了一种较为通用的稳定性指标模型。2017年,文献在SAE J2194标准测试下,建立了非线性有限元模型。为了应对试验昂贵费用以及试验结果随机性,文献发明了一套可对多种工程车辆进行ROPS研究的试验台及其配套系统。文献针对重型卡车做了试验,在90°翻车事故中评估驾驶员损伤,以验证SAE规定的合理性。在国内,2014 年,文献[9−14]运用MADYMO 软件建立SAE J2114台车翻滚试验仿真刚体模型。对比分析乘员系与不系安全带两种情况下的乘员头部伤害情况。2014年,文献使用Hypermesh软件对已有的整车三维模型和试验平台车进行分析计算。2017年,文献根据ISO21299标准建立了参数化预测模型,对割草机的容身空间进行分析。2018年,文献充分考虑汽车在行驶过程中的横向坡度、后向坡度,并对坡度进行合成,以此提出一种基于15 自由度的汽车动力学模型。2019年,文献建立了基于偏航的6自由度ZTR 割草机连续翻滚特性的预测模型。同年,文献建立了几何非线性有限元模型与多刚体有限元模型对割草机侧翻工况下对驾驶员损伤进行预测。
车辆的安全性一直是国内外学者的研究热点,在主动防止安全事故发生的同时,对车辆被动安全性能的要求也越来越高[15−17]。翻车事故是一种事故率低但危害性较大的事故形式,一直都是车辆碰撞安全性研究的一个难点。计算机仿真建模因其高效、可重复、低成本等特点,成为研究驾驶员损伤的首要措施。其中,多刚体动力学因其高效性而广被人们所采纳,但是其精度低;有限元分析则能够准确地对车辆碰撞翻滚的过程进行高精度模拟,并能够解决复杂问题,成为人们现在研究车辆翻滚仿真的主要工具。国内外对翻车试验的研究主要面向公路车辆的侧翻工况,对割草机的研究较少。文章在分析比较了国内外翻车试验的基础上,运用有限元建模方法对割草机在坡道行驶时发生的后翻进行了分析研究。
2 割草机建模
根据ZTR割草机实车结构,基于国际标准ISO21299(2009E),建立三维实体模型,并添加人体模型,建立割草机后向翻滚的有限元模型。仿真分析得出割草机后向工况下ZTR割草机后向翻滚的临界点,分析翻滚过程中的运动规律,得出驾驶员的损伤情况,并分析人体损伤最大的部位。
2.1 割草机后向翻滚模型
首先根据坐骑式割草机实车所提供的数据,对三维模型进行赋值,省略对总体质量影响不大的零件;其次,为保证结果的精确性,在Hypermesh中对三维模型进行网格划分,尤其对那些很可能与地面接触的部件以及翻滚碰撞过程中可能出现大变形的部件都进行较小的网格划分[18]。翻转平台所有单元施加固定约束,使割草机只受重力无初速度的在平台上翻滚。割草机纵向后翻仿真模型,如图1所示。
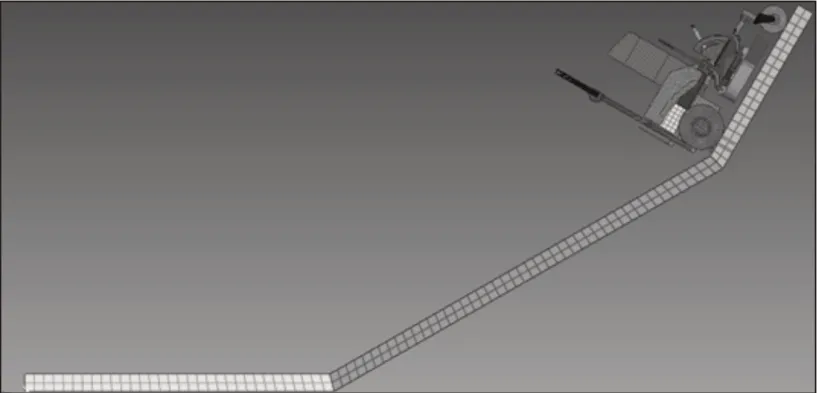
图1 坐骑式割草机后翻仿真模型Fig.1 Mounted Mower Back Turning Simulation Model
2.2 驾驶员损伤模型
文章中所使用的假人模型采用LSTC 自带的HybridⅢ第50百分位假人[19],对假人标定后将其在Oasys primer中导入到已有的割草机模型中,设置假人H点与割草机R点重合,调整至正确坐姿并使其处在两点式安全带的保护下,如图2所示。
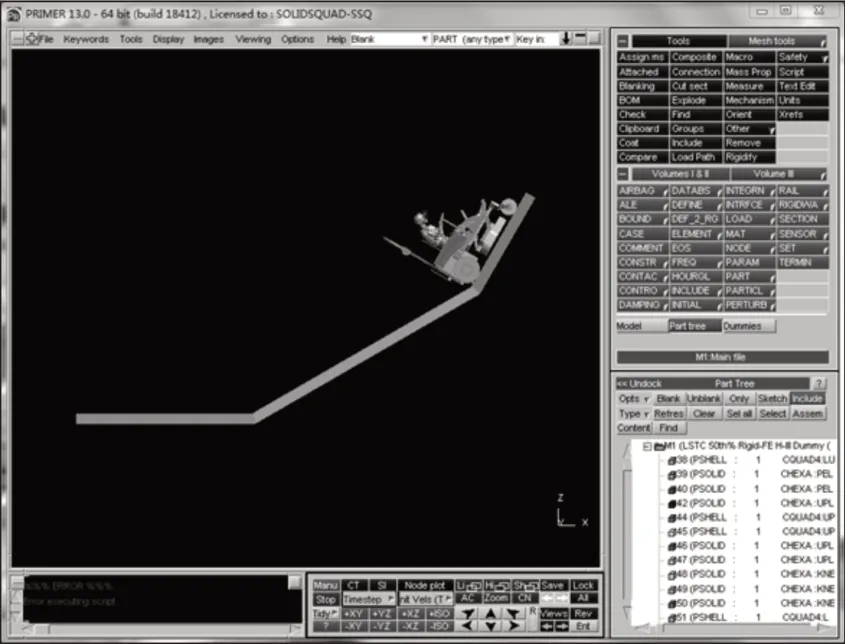
图2 驾驶员损伤模型Fig.2 Driver Injury Model
2.3 驾驶员损伤评价指标
根据已有文献的调查和分析结果,得出翻滚碰撞过程中驾驶员最容易受伤以及受损严重的部位,对比损伤评价指标预测驾驶员伤亡程度。在翻滚方面,现有的研究缺乏统一的标准和法规,文章参照FMVSS208乘员碰撞保护法规对割草机驾驶员的损伤程度进行评价分析。具体准则如下:
(1)头部损伤评价指标
以头部伤害指标(即HIC值)评价头部损伤程度,其中,HIC值由式(1)求得。

式中:a(t)—头部质心的合成加速度(即假人头部中心1号节点的加速度),其实时数据由模型的仿真数据测得;t1、t2—任意时间历程36ms 以内的两时刻;HIC—所有计算值的最大值。评级指标要求头部加速度a(t)安全阀值为80g,头部损伤值HIC安全阀值为1000。
(2)颈部损伤评价指标
在车辆翻滚碰撞过程中,假人模型的颈部在变形过程中承受轴向拉压力及相应的弯矩。法规中规定颈部的轴向拉力安全阀值为3.3kN,轴向压力的安全阀值为4kN。假人模型颈部所受弯矩由式(2)得到。

式中:Mocy—颈部所受的总力矩;My—颈部在Y方向的力矩;Fx—剪切力。法规规定:颈部承受的弯曲力矩安全阀值为108.6N·m,外翻(伸长)力矩安全阀值为57N·m。
(3)胸部损伤评价指标
在车辆翻滚碰撞过程中,人员与车内约束系统会发生二次碰撞,外力做功挤压胸部使其变形,从而对胸部造成损伤。因此,以胸部压缩量作为胸部损伤的评价指标。
根据评价指标的要求胸部和脊骨之间有压缩的偏差安全阀值为50mm。
3 仿真分析
3.1 后翻过程分析
割草机在后向坡道上行驶时,如等速上坡,随着道路坡度的增大,前轮与地面法向作用力逐渐减小。当道路坡度增大到一定程度时,前轮与地面的法向作用力降至零,割草机将失去平衡,并可能后向翻倒。
割草机上坡时,随着坡度的不断增大,前轮与地面的接触力逐渐减小,如图3所示。当坡度到达临界点时,前轮与地面的接触力为零,即FZ1=0,此时割草机的行驶稳定性遭到破坏。
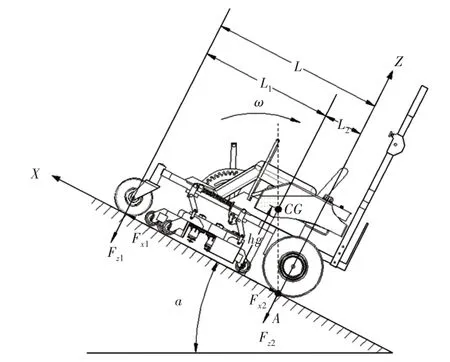
图3 坐骑式割草机理论模型Fig.3 Theoretical Model of Mounted Mower
表1中,无驾驶员坐骑式割草机在210ms时发生失稳,处于临界状态。在600ms时,ROPS底部与地面接触。800ms时,发动机护栏底部触地。880ms 时,ROPS 与地面完整接触。970ms 时坐骑式割草机整个车身弹起。1130ms时,割草机再次与地面接触,并沿坡道向下滑移。整个过程中,ROPS发生弹性变形,未侵入驾驶员的生存空间。

表1 坐骑式割草机后翻过程Tab.1 Mounted Mower Back Turning Process
仿真结果显示:坐骑式割草机在坡道发生后向失稳翻滚时,无驾驶员模型翻滚过程中产生了45.06mm的变形量,满足该装置吸收能量的要求下的最大弯曲变形量(46.9mm)。
3.2 人体损伤分析
在Oasys primer中完成乘员约束系统建模,导入假人并对其姿态进行调整,完成安全带的创建后再在hypermesh 中建立约束,进行仿真计算。
坐骑式割草机后翻驾驶员动态响应,如表2所示。割草机在200ms时发生失稳,割草机在710ms时割草机发动机护栏底端触地,在850ms时ROPS顶端与地面接触,1000ms时ROPS发生塑性变形且假人的腿部完全脱离初始位置,1250ms时假人腿部翻折到最大位置,1600ms之后,整个模型以及假人保持同样的姿态沿着斜坡滑移。
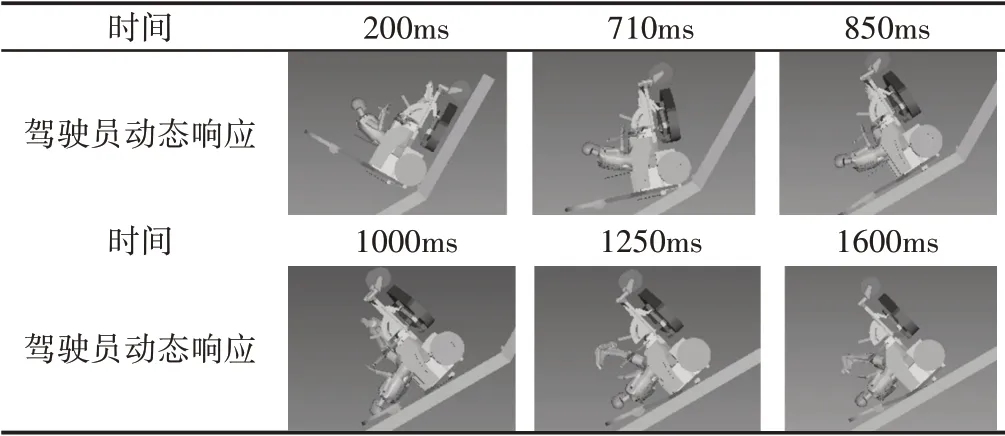
表2 坐骑式割草机后翻驾驶员动态响应过程Tab.2 Dynamic Response of Mounted Mower Driver
仿真结果显示:带有驾驶员的割草机模型在翻滚过程中,ROPS发生永久性变形,翻滚保护装置产生了501.148mm的变形量,超出了吸能要求下的最大弯曲变形量(46.9mm),驾驶员容身空间被侵入,驾驶员头部暴露在危险区域,容易受到损伤。
由图4可见,驾驶员头部加速度有三次明显的激增。第一次A点发生在坐骑式割草机ROPS 顶部触地,ROPS 与斜坡完全接触。第二次B点与第三次C点均发生在割草机ROPS变形到最大之后,整个模型以及假人之后不出现姿态的变化。

图4 头部加速度曲线Fig.4 Head Acceleration Curve
图5可看出,驾驶员的颈部有两次超出安全阀值,第一次D点为坐骑式割草机刚刚失稳,驾驶员由于惯性,维持原有坐姿,从而受到较大的颈部轴向拉力。第二次E点发生在割草机ROPS变形到最大之后,整个模型以及假人不再出现姿态的变化。
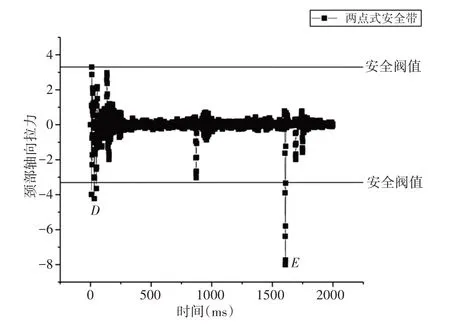
图5 颈部轴向拉力曲线Fig.5 Neck Axial Tension Curve
由表3可见,后翻过程中驾驶员受到的颈部伤害较大,轴向拉力严重超出安全阀值。头部3ms加速度严重超出安全阀值,驾驶员可能受到较为致命的伤害。
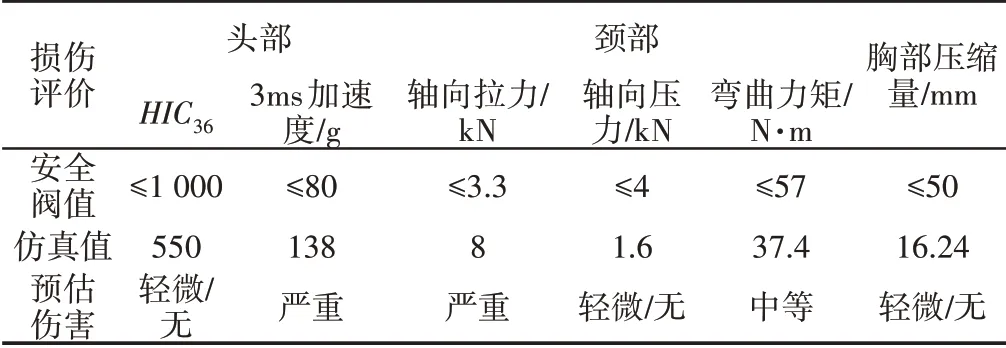
表3 驾驶员损伤预测值Tab.3 Predicted Driver Damage Value of Mount Lawn Mower
4 结论
这里采用Hypermesh建立了坐骑式割草机模型,分析了割草机在爬坡发生后翻时,翻滚保护装置的动态响应。
在Oasys 中依据C−NCAP 对驾驶员进行姿态调整及准确定位,并通过仿真分析对驾驶员在后翻过程中的伤亡进行了研究,并获得了驾驶员各部位的损伤值。
(1)在翻滚过程中,驾驶员头部损伤值未超过安全阀值;头部加速度仿真值超出安全阀值72.5%,导致驾驶员头部所受惯性力过大,容易与割草机其他部件或地面发生碰撞引起损伤;驾驶员颈部受到的轴向拉力仿真值超出安全阀值142.42%,预估受到严重的损伤。胸部压缩量比较小,预估不会受到损伤。
(2)后翻过程中,坐骑式割草机ROPS变形量小于最大变形量;带有驾驶员的割草机模型的ROPS发生永久变形,驾驶员的生存空间被侵入。
(3)坐骑式割草机对驾驶员的保护并不全面,仍需加强。坐骑式割草机后翻中驾驶员的损伤值,能够为更全面地为保护驾驶员提供帮助,有效降低驾驶员损伤程度,促进园林车辆安全性能的更新与提高,为坐骑式割草机驾驶员保护该领域提供了理论基础。
