基于横向安全评估的智能客车防侧翻自主决策控制研究
2023-02-08郭春港王洪亮徐伟业
郭春港,王洪亮,徐伟业
(210094 江苏省 南京市 南京理工大学 机械工程学院车辆工程系)
0 引言
随着无人驾驶技术发展,由感知-决策-执行构成的技术方案被越来越多的智能车辆所采纳,但智能域决策的行车指令是否将导致车辆事故[1],尤其是侧翻事故,尚且存疑。目前国内外对车辆横向安全,尤其是防侧翻控制研究较为广泛。
防侧翻控制关键技术之一就是识别出侧翻时刻,即侧翻指标[2]。常用的主要有车厢侧倾角、侧向加速度、LTR 和侧翻时间(Time To Rollover,TTR)。以车厢侧倾角和侧向加速度作为侧翻指标的[3-4],常常对传感器的精度和可靠性要求较高,且从单一车辆状态来评价,有失全面性。侧翻发生时必然发生载荷的横向转移,且最明显的特点就是一侧车轮离地,LTR 就是根据此特点提出来的[5]。但是,传统的LTR 只能反映车辆的侧翻状态,不能实现预警功能。TTR[6-7]指当前与未来侧翻发生时刻的时间间隔,该方法可以实现侧翻预警,然而其算法计算量较大,对处理器有一定要求。
针对防侧翻控制方法,主要集中在主动悬架、主动转向和差动或全轮制动,以及几者的结合。主动悬架[8-9]主要是使侧倾刚度可变,但受限于机构,防侧翻效果有限。主动转向和差动制动被证明都是比较有效的抗侧翻手段,但单一使用时[10-11],执行机构的工作量较大,实际应用上可能会超出上限,因此采用主动转向和差动制动的联合控制较多[12],采用全轮制动的较少。江苏大学的解建[13]虽采用了转向和全轮制动的联合控制,但没有考虑转向时制动对路面附着系数的要求。而且目前大都是针对有人驾驶车辆进行的控制算法设计,或是针对智能车的单纯的主动控制,缺少预测环节。智能车相较于传统汽车最明显的一点就是,在未来有限时间内汽车所有的动作都是被规划好的,意味着按照规划好的车辆动作来预测未来车辆安全情况,更加具有参考意义。
本文以某款中型智能网联客车为研究对象,针对非绊倒侧翻,研究主动转向和全轮制动控制方案,主要包括:(1)搭建车辆三自由度模型,设计状态观测器实现状态重构;(2)基于传统LTR,推导具有预测作用,并将其作为侧翻指标,监测车辆是否会发生侧翻;(3)考虑转向时制动对路面的要求,提出一种防侧翻联合控制算法,在即将侧翻时可主动施加转向和制动,以防止侧翻发生。
1 客车动力学模型
为进行防侧翻自主决策控制,本文首先搭建了用于描述侧倾、横摆和侧向的三自由度车辆模型。考虑到实际应用中状态量不易获得的问题,基于卡尔曼滤波技术设计状态观测器,对状态进行重构。同时基于传统LTR 提出具有预测作用的,并进行敏感量分析。
1.1 三自由度车辆模型
图1 展示了包含智能客车侧向、横摆、侧倾三自由度的汽车模型受力情况。为简化分析,在建立数学模型之前,作出以下假设:(1)忽略汽车的俯仰运动;(2)忽略空气动力学因素对汽车的影响;(3)忽略前轮纵向力对侧向和横摆运动的影响,且左右轮胎纵向力相等;(4)纵向车速远大于侧向车速,即u>>v;(5)前轮转角和车厢侧倾角较小,因此可以认为 cosδ≈1,sinδ≈δ;cosφ≈1,sinφ≈φ。

图1 车辆受力分析Fig.1 Vehicle force analysis
根据牛顿第二定律,将绕X 轴、绕Z 轴和沿Y 轴的平衡方程写成状态空间形式,如式(1):


其中:γ=Ix+msh2;θ=Ix+(m-ms)h2;Ix,Iz——簧上质量的侧倾转动惯量、整车横摆转动惯量;φ——车身侧倾角;ms——簧上质量;h——侧倾中心与簧上质量质心的距离;ks,cs——悬架等效侧倾刚度和等效侧倾阻尼;ω——汽车横摆角速度。
1.2 基于卡尔曼滤波的状态观测器设计
式(1)的所有状态向量仅可以通过惯性传感器获得,其他状态向量由于传感器价格或设计难度等原因不易获得,同时考虑到传感器常常受到干扰,测得的数据噪声较大,因此利用卡尔曼滤波技术进行状态估计。
考虑以下被估计系统:

式中:H——观测矩阵;ϖ,V——模型误差和观测噪声,且有

那么基于卡尔曼滤波技术的状态观测器设计步骤如下:
(1)设定初始状态变量为

(2)根据建模误差与传感器特性,为Q 与R赋值;
(3)状态观测器的时间更新部分将利用前向欧拉法,得到离散化状态方程:

其中,G=I+ΔtA,F=ΔtB;Δt 为时间离散单位。那么时间更新部分为

(4)卡尔曼滤波状态观测器状态更新部分为

式中:——状态x 的估计。
1.3 侧翻指标
在侧翻发生时,往往是内侧轮胎先离地,而内侧轮胎离地的直接原因是垂向载荷在客车的侧倾和侧向运动下发生了横向转移,LTR 可以很好地描述这种转移,因此本文也将基于LTR 进行侧翻指标的推导。LTR 的表达式为

式中:FL,FR——汽车左、右两侧的轮胎垂直载荷。简单分析易知,LTR∈[-1,1],且越接近0 说明车辆的侧翻稳定性越好,越接近±1 说明车辆越容易发生侧翻。因此,为了防止侧翻发生,需要将LTR 限制在一个合理的阈值LTRth之内。一般选择LTRth=0.8~0.9,本文在进行大量仿真后,将LTRth设定为0.85,可以在防止侧翻的情况下,降低控制器介入频率。
同样是受限于传感器及测量成本,轮胎的垂向力并不容易获得,因此本文通过分析侧倾运动的受力情况,将两侧轮胎差值通过其他的汽车状态参数表达出来。由图1(a),考虑到簧下质量占客车总质量的比例较大,根据牛顿力学原理,对簧下质量质心应用力矩平衡,有

结合状态方程(1)得到LTR 的状态空间表达式:
式中:C=PQ,D=PR;

但传统的LTR 只能用来衡量当前时刻的侧翻危险程度,往往无法对未来时刻进行预警,而预警控制措施有利于预防侧翻事故的发生,因此本节在基于传统的LTR 下,提出了侧翻预警指标LTRp。由式(5)的离散化状态方程,假设t0时刻状态量记为x0,输入记为δ0,则下一时刻,即在t0+Ts的状态量可以表示为

再由系统状态x1和系统输入可以得到预测状态量x2如下:

在未来的有限时间内,智能车的前轮转角都已规划好,将其按时间Ts离散化,因此通过k 次迭代,可以得到kTs秒后的车辆状态的预测值xk:

1.4 LTR 敏感量分析

同时,横摆角速度可由式(21)近似得到:

将式(19)—式(21)代入式(14),得到稳态横向载荷率LTRs:

式(22)表明,纵向车速和前轮转角对LTRs有着直接的影响。可以看出,LTRs与纵向车速的平方成正比,这说明在高速时若提前进行制动,在转向时可以有效地降低LTR;同时也与前轮转角成正比,因此主动地回正前轮也可以起到降低LTR的作用,这为后续防侧翻控制策略和控制器设计提供了依据。
1.5 车辆模型验证
为了验证1.1 节所建立的三自由度车辆模型正确性,在MATLAB/Simulink 中建立了仿真模型,同时在车辆动力学仿真软件TruckSim 中也建立起参数相同的车辆模型,作为仿真模型的数据参考。所选取的智能客车其结构参数如表1 所示。

表1 某型智能客车结构参数Tab.1 Structural parameters of a certain type of intelligent bus
设定工况为常见的双移线工况,车速为恒定的40 km/h,模型运行结果如图2 所示,其中实线为TruckSim 模型,点线为三自由度线性模型。对比发现两者仿真结果非常逼近,误差率如图3 所示。

图2 模型验证对比结果Fig.2 Comparison results of model verification

图3 各状态量误差率Fig.3 Error rate of each state quantity
2 防侧翻自主决策控制算法研究
当智能客车高速行驶时,因遭受网络攻击或突然出现障碍物,智能域可能会发出一大角度转向指令,由于客车具有比普通乘用车更高的质心,显然该指令极易引起车辆侧翻,造成严重的交通安全事故。本文所研究的防侧翻自主决策控制算法,就是在识别出危险指令后,将其转化为“安全”指令,即保证不会引起侧翻后,再下发执行。
2.1 防侧翻控制策略
由1.4 节分析得知,降低LTR 的有效手段是提前制动和前轮快速回正。在电子助力转向(Electric Power Steering,EPS)技术支持下,已经可以实现快速转向。与纵向车速的二次方成正比例关系,因此在高速时,提前制动可以更加有效地降低LTR,降低车辆侧翻风险。然而考虑到转向时的纵向最大附着系数下降,且可用于制动的时间较短,因此单独制动难以迅速降低LTR,故制动控制发挥的作用有一定的限度。但制动控制一方面可以作为转向控制的辅助手段,降低转向EPS 的工作量,另一方面可以与转向控制互为冗余,提高控制器对故障的鲁棒性,故制动控制在降低LTR上又变得很有必要。
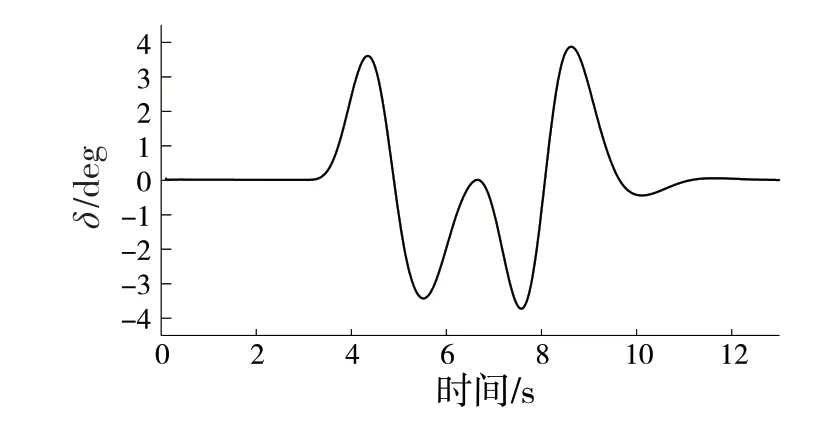
综合考虑,本文采用以主动转向为主,主动制动为辅的联合控制策略。系统整体框架如图4 所示。首先根据整车可提供的横摆角速度、纵向车速信息以及智能域控制器下发的转向指令,由状态观测器算出侧向车速、侧倾角、侧倾角速度,再由LTR 预测器计算出侧翻指标LTRp,并与设定好的阈值LTRth比较,若LTRp 图4 系统控制框架Fig.4 System control frame 滑模控制(Silding Mode Control,SMC)已广泛应用于汽车领域[14]。SMC 可在动态变化中控制系统,使被控系统沿特定状态轨迹作小幅、高频运动,即滑动模态。滑模控制对非线性系统有很好的控制效果,同样适用于对LTR 的控制。上节分析指出,通过修正前轮转角指令可快速降低LTR,因此本文采用滑模控制方法对转角指令进行修正。 定义变量LTRr和滑模变量s: 式中:τ——时间常数,LTRth——所设计的横向载荷转移率阈值,满足0<LTRth<1。 在给定LTRth的情况下,通过设计τ使LTRr快速逼近LTRth。滑模变量s 设计为LTR 的误差积分,显然,防侧翻自主决策算法的控制目标即是当t →∞时,保证s →0,即使LTR →LTRr,最终保证LTR →LTRth。 定义如下切换控制: 本文以制动减速度为操纵变量,以全轮制动的方式,采用PID 的控制方法,以期实现将LTR 快速稳定在LTRth附近。PID 控制器的微分方程为 为了防止出现制动车轮抱死导致失去转向能力甚至侧滑等危险情况,利用附着椭圆对输出的ab进行限制。在车辆坐标系下,车轮制动力需满足不等式约束条件: 同时除以m 得: 式中:μ——道路附着系数,由于其观测非本文的研究重点,故不详述,具体方法见文献[15];ay——车辆侧向加速度,可以由惯性传感器获得。 为了验证底盘域控制器防侧翻自主决策控制算法的有效性,在双移线工况进行了离线仿真[16-17],将无控制、施加转向控制和施加联合控制下的智能客车运行情况进行对比分析。仿真中SMC 控制器的基本参数设置为:τ=0.02,ρ=0.009 5,PID 控制器的基本参数为KP=-3,KI=-2,KD=0.08,并设定智能域控制器的加速度指令恒为0。 设定初始车速为80 km/h,客车在如图5 所示的双移线工况输入下,仿真结果如图6 所示。由图6(a)可以看出,整个过程在无控制下分别于4.8,6.5,9.2,10.9 s,超出设定阈值。由于是线性模型并且求得的是数值解,因此存在│LTR│>1 的情况,同时防侧翻控制器开始介入,并将LTR 稳定在0.85附近。就控制效果而言,联合控制与转向控制相差不大,但从图6(b)、图6(c)知,在联合控制下,车速下降了11 km/h 左右,在10.75 s 左右的转角指令为2.2 deg,而纯转向控制此时为1.3 deg,这是因为制动使车速下降,在保证不侧翻的情况下前轮可以获得更高的转向角度,意味着联合控制具有更小的转向半径和更强的转向能力。 图5 双移线工况前轮转角输入Fig.5 Front steers input of double lane-change 图6 双移线工况仿真结果Fig.6 Simulation results of double lane-change 从图6(d)也可见,按照原智能域控制器的指令驾驶,在不考虑侧翻的情况下,车辆的侧向位移最大值为9.3 m,当采用纯转向控制时,最大侧向位移仅7.6 m,而联合控制则为8.4 m,跟踪误差降低了8.6%,说明联合控制在一定程度上降低了与规划路径的偏差。因此,采用制动与转向的联合控制可以在避免发生侧翻的前提下,在一定程度内提高路径跟踪能力。 本文针对高速下无人驾驶客车智能域的大角度指令可能会引起侧翻问题,设计了一套基于横向安全评估的防侧翻自主决策控制系统,包括全维状态观测器、LTR 预测器和防侧翻控制算法模块。状态观测器根据横摆角速度估计出侧向车速、侧倾角和侧倾角速度,并用于计算侧翻指标,判定车辆未来是否会发生侧翻。控制系统拦截侧翻倾向大的指令,并由所提出滑模控制主动转向和考虑路面附着系数的全轮制动的联合控制算法,计算出具有横向安全品质的前轮转角和制动减速度,随后下发执行。仿真结果表明,所提的联合控制算法能很好地防止侧翻,与单一的转向控制相比,联合控制可以减少前轮回正角度,同时降低了横向路径跟踪偏差。
2.2 基于滑模变结构的前轮转角控制方法


2.3 基于PID 的制动控制算法



3 防侧翻控制算法仿真验证

4 结语
