顾及人眼视觉感知特征的三维地籍产权体最优视点选择方法
2023-02-07刘冰洁,朱敏,孙在宏,吴长彬
刘 冰 洁,朱 敏,孙 在 宏,吴 长 彬
(南京师范大学地理科学学院/虚拟地理环境教育部重点实验室,江苏 南京 210023)
0 引言
随着城市化进程不断推进,以地表权利为核心的传统地籍管理模式已不能满足土地资源立体化中地籍管理的要求[1-4],土地立体化开发成为土地利用的新趋势,基于三维GIS的地籍管理研究逐渐涉及地上、地表、地下三部分[5-7]。三维地籍产权体包含大量的空间权属信息和物理信息,不仅需要展示三维地籍对象的外部特征,还需要同时表达权属数据和内部特征[8]。目前,三维地籍可视化研究分为两方面:1)三维地籍产权体的可视化与交互。其核心在于产权体中物理和法律信息的精细化表达[9-11],包括三维地籍产权体的构建[12-14]、拓扑存储[15-18]、可视化[19-21]和空间分析[22-24],以及运用视图变化、透明处理和聚焦等技术展示三维地籍产权体的空间位置、体分割、体占有、三维地籍数据的动态逻辑关系[25,26]及周围环境,并通过虚拟现实技术实现三维地籍产权体的查询、分析和管理等功能[27,28]。2)三维地籍制图表达。包括三维宗地图、地籍图的输出和产权登记,已成为现阶段地籍制图管理的主要表现形式和内容。随着“房地合一”概念的提出及实现,土地证书和房产证书合并为房地产权证书,三维地籍产权体的展示对地籍产权证书的制作十分重要[29,30]。当前的三维地籍管理模式已逐渐形成以电子展示和纸质表达为主的建筑平面图、横截面图、三维地籍产权体的三视图(正视图、侧视图、轴侧图)以及纸质格式文本对RRRs(Rights,Restrictions,and Responsibilities)的描述等形式。虽然虚拟现实与增强表达技术持续发展,交互性高,但基于纸质的三维地籍表达与制图模式具有稳定、简要、富有法律依据等特色,仍是当前及未来的主流方式。因此,如何在纸质等平面媒介上,尽可能形象、直观地描述三维地籍产权体的几何形态和拓扑关系,有效传递产权体视觉信息,使之符合人眼视觉感知特征,对三维地籍可视化研究及三维地籍系统社会化应用尤为重要。鉴于此,本文提出一种顾及人眼视觉感知特征的三维地籍产权体最优视点选择方法,以期为三维地籍制图和三维地籍系统管理提供参考。
1 研究方法
本文提出的顾及人眼视觉感知特征的三维地籍产权体最优视点选择方法分为训练阶段和预测阶段(图1):1)训练阶段。首先,生成包围三维地籍产权体的正二十面体,由正二十面体的12个顶点和各三角形面的重心(20个点)扩散至边界球面,选择正二十面体几何中心平面以上的16个视点构建候选视点集合;其次,对输入的三维地籍产权体,以人观察物体常用的3/4视点计算不同候选视点的舒适性;然后,为确保三维地籍产权体几何特征的覆盖率,计算三维界址点可见性和可见面积比,同时结合所包含的权籍信息量进行人工评分;最后,将人工评分数据和特征因素数值输入多层感知器(Multilayer Perceptron,MLP)中进行训练,以有效避免陷入局部最优解和权重值分配的问题,训练结束后输出三维地籍产权体最优视点选择模型。2)预测阶段。利用训练阶段获取的最优视点选择模型计算出每个视点下三维地籍产权体的得分,得分最高的视点即最优视点,最后输出最优视点下的三维地籍产权体图件。
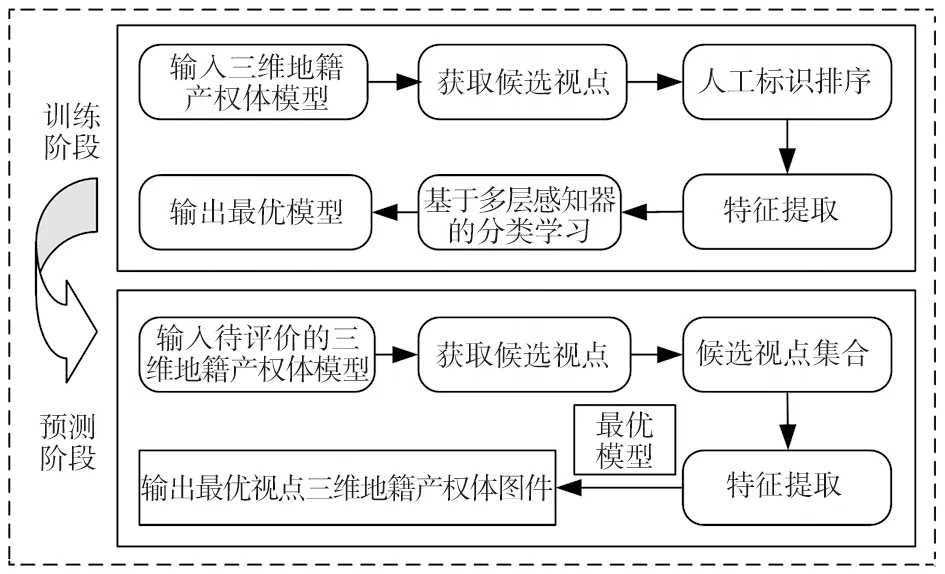
图1 三维地籍产权体最优视点选择实验流程Fig.1 Flow chart of experiment of viewpoint selection for 3D cadastral property units
1.1 候选视点选择
三维地籍产权体包含不同产权和权属信息,由于人眼视角的限制及产权体的遮挡,导致不能通过直接分析产权体的形态和结构确定最佳视点的位置和范围。因此,选择一个能包含最大权籍信息量且符合人体视觉舒适的视点尤为重要,但视点过多会增加计算复杂度,降低视点选择效率;视点过少则会导致重要细节丢失,影响视图选择效果。综合考虑这两种情况,本文制定候选视点选择规则:1)视点范围内的三维地籍产权体信息量较大且符合人体视觉舒适度;2)候选视点布设适量,既能减少算法的计算量又能反映模型特征。
候选视点集合通常由三维地籍产权体的包围球模型采样获得,相比其他包围球的离散网格点,基于正二十面体的球面离散网格点几何特征更均匀,有利于三维地籍产权体空间数据的集成与表达[31],因此,本文选择包围三维地籍产权体的正二十面体的12个顶点和每个三角形面的重心(20个点)作为候选视点。考虑到在三维地籍产权体输出时,通常采用俯视的观测习惯,因此,最终选取的观测视点仅包含正二十面体几何中心以上的16个视点。
1.2 模型特征选择
一个最优视点应包含三维地籍产权体足够多的空间产权信息和权属信息,并帮助观察者快速感知模型,同时,三维地籍产权体最优视点下的视图要有立体感、实际感、舒适感。人眼视觉特征主要包含亮度知觉、颜色知觉、形状知觉、空间知觉、运动知觉五部分。本文从形状知觉的角度,选择三维界址点可见性对产权体视图进行评价,使最优视图更准确地表达物体的整体构造和表面特征;从空间知觉的角度选择可见面积比、视点舒适性衡量立体效果,提高观察者对产权体的形状感知[32,33]。
1.2.1 三维界址点可见性 对于特定视点w,顶点v如果没有被其他元素遮挡,则顶点v对于视点w可见。因此,本文以从视点w可见到的模型三维界址点数量N(w)与三维界址点总数N(s)之比衡量三维界址点可见性V(s,w)(式(1))。
V(s,w)=N(w)/N(s)×100%
(1)
1.2.2 可见面积比 三维界址点可见性并不能反映它与整个三维地籍产权体的尺度关系,且可能导致视图只显示细节信息而忽略总体结构。因此,本文引入可见面积比R(w)(式(2))评价三维地籍产权体的面积尺度,以尽可能多地暴露表面积,并采用投点法近似估算R(w)(图2)。
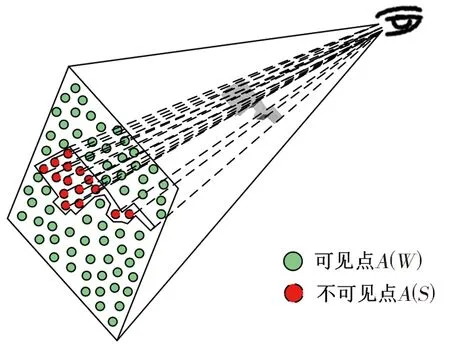
图2 可见面积比求解示意Fig.2 Schematic diagram for solving the visible area ratio
R(w)=A(W)/A(M)
(2)
式中:M为输入模型;在视角w下对模型M投影,A(W)为投影中可见的三维均匀离散点数,A(S)为投影中不可见的三维均匀离散点数,A(M)为投影面的均匀离散点总数,即A(M)=A(W)+A(S)。
1.2.3 视点舒适性 心理学认为在观察某物体时,通常存在最佳视点,该视点所在位置与输入模型竖直方向的夹角dbest在某一个或几个区间内,称为Canonical视点[34],接近人观察物体常用的3/4视点。因此,本文将3/4视点与模型垂直方向向量n的夹角dbest作为评估三维地籍产权体最优视点的影响因子,以此衡量视点的舒适度。假设某三维地籍产权体最优视点所在位置wbest对应向量与模型竖直方向向量n的夹角为dbest,则候选视角w与模型竖直方向向量n的夹角dw越接近dbest越好,即D(w)(式(3))越大,越符合人眼观察物体的舒适度(图3)。
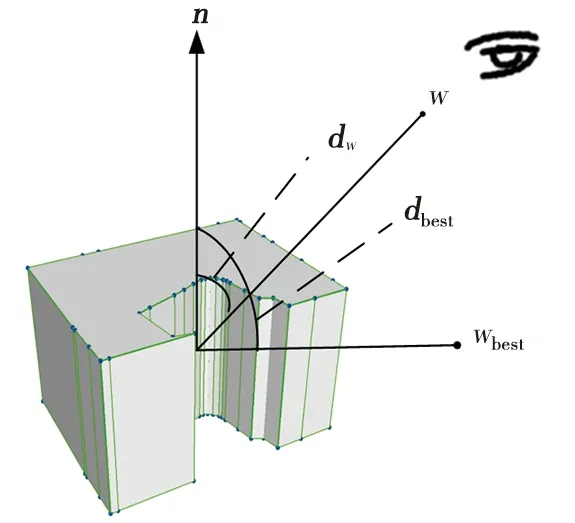
图3 视点舒适性示意Fig.3 Schematic diagram for viewpoint comfort
(3)
1.3 多层感知器(MLP)
本文将三维界址点可见性V(s,w)、可见面积比R(w)和视点舒适性D(w)作为三维地籍产权体的特征因素,每个特征因素对最优视点选择的影响和侧重点不同,二者呈现多元非线性映射关系(式(4))。各特征因素的权重值是最优视点选择的关键,本文选用多层感知器(MLP)训练模型,避免权重值选择陷入局部最优情况,克服固定权重值对最优视点选择的影响。
y=F(V(s,w),R(w),D(w))
(4)
式中:y为视点w的人工评分。
多层感知器(MLP)具体实现步骤为:1)输入训练数据,为每条边的权重和偏置随机分配数值;2)将训练数据样本的输入特征作为输入层,经过前向传播得到输出值;3)利用输出值和样本值计算总误差,再利用反向传播更新权重;4)重复上述步骤,直至输出的误差低于设定阈值。本文根据各视点下的视图,将计算得出的三维界址点可见性、视点舒适性与可见面积比作为输入向量,经过计算输出对应视图得分,最终选出最优视点。
2 实验分析
2.1 实验区概况及实验环境
本文以江苏省常州市新北区为实验区域,该区域土地开发强度大,土地立体化开发密集,具有典型性。以区域内三维地籍产权体(宗地图层、宗地体、三维界址点、三维界址线)进行实验验证,依赖ArcGIS Engine 10.7和DevExpress 2019,基于C#语言实现算法。
2.2 候选视点集生成

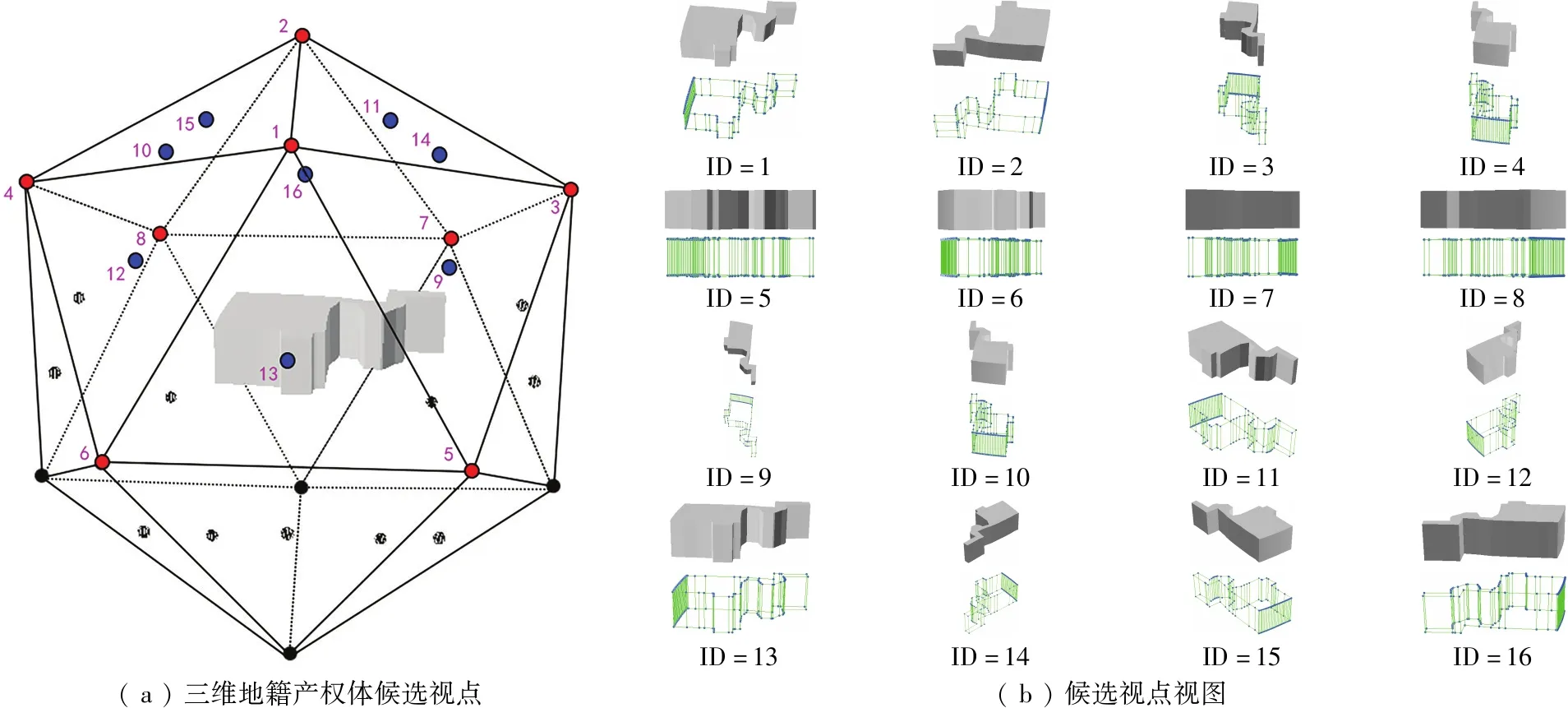
注:红色点为正二十面体顶点,蓝色点为正二十面体各三角形面的重心点,黑色点为位于三维地籍产权体平面几何中心以下的点。图4 三维地籍产权体候选视点对应视图Fig.4 Corresponding views of candidate viewpoints for 3D cadastral property units
2.3 视点人工评分
首先,选择实验区内300个地上(模型a)、地表(模型b)和地下(模型c)三维地籍产权体,计算出每个三维地籍产权体不同视点下的三维界址点可见性、可见面积比、视点舒适性。邀请20位具有地理信息科学、三维地籍相关知识的专家对三维地籍产权体视图进行打分(S1),评分结果分为5个等级:很合适(10分)、合适(8分)、中立(6分)、不太合适(4分)、不合适(2分),将视图的平均得分作为最终得分,然后将得到的人工打分及3个特征因素的值(表1-表3)存入文件型数据库中,利用MLP进行分类学习,生成三维地籍产权体最优视点选择模型。
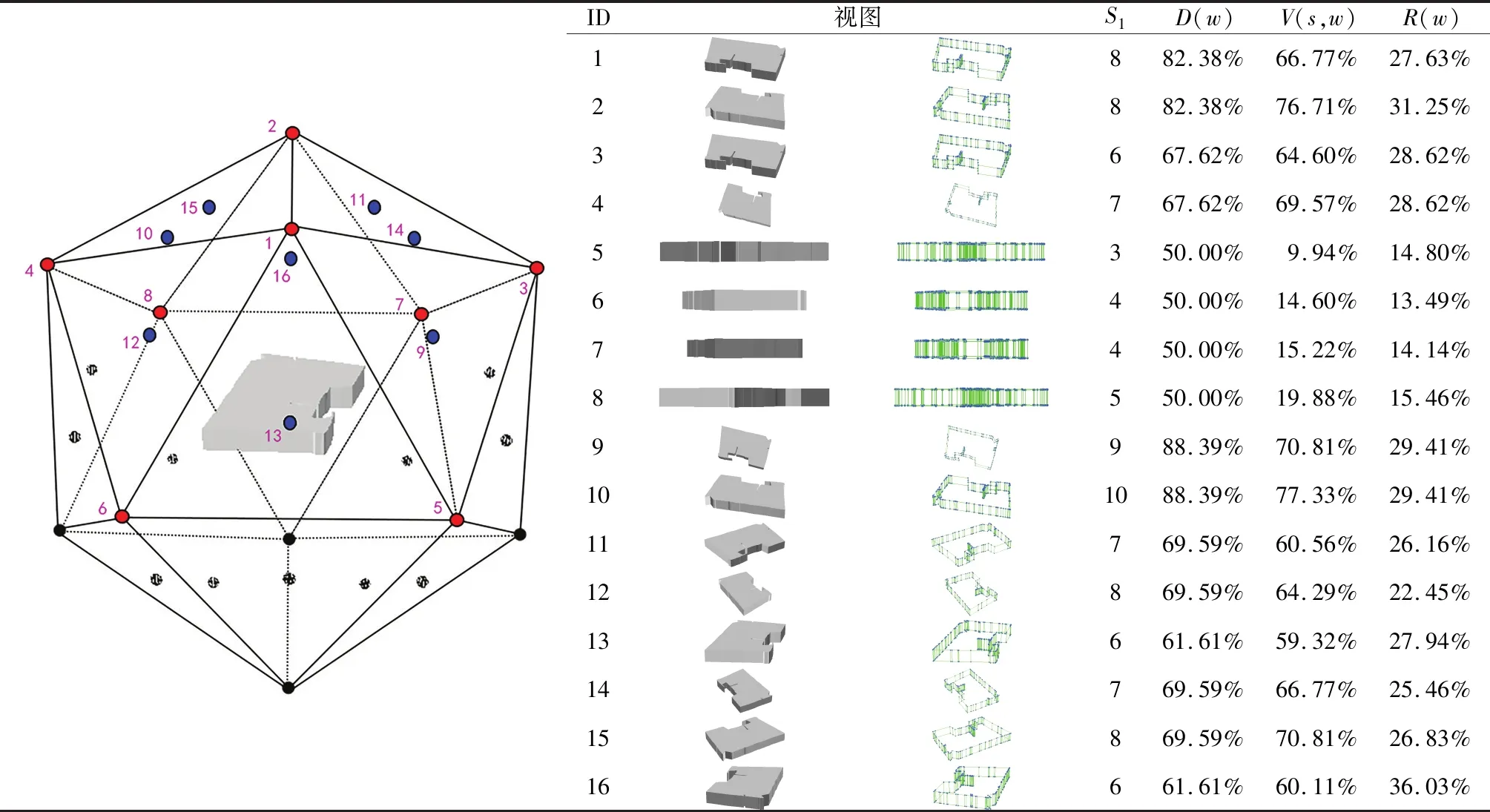
表1 模型a人工评分及特征因素数值Table 1 Artificial scoring and characteristic factor values of model a
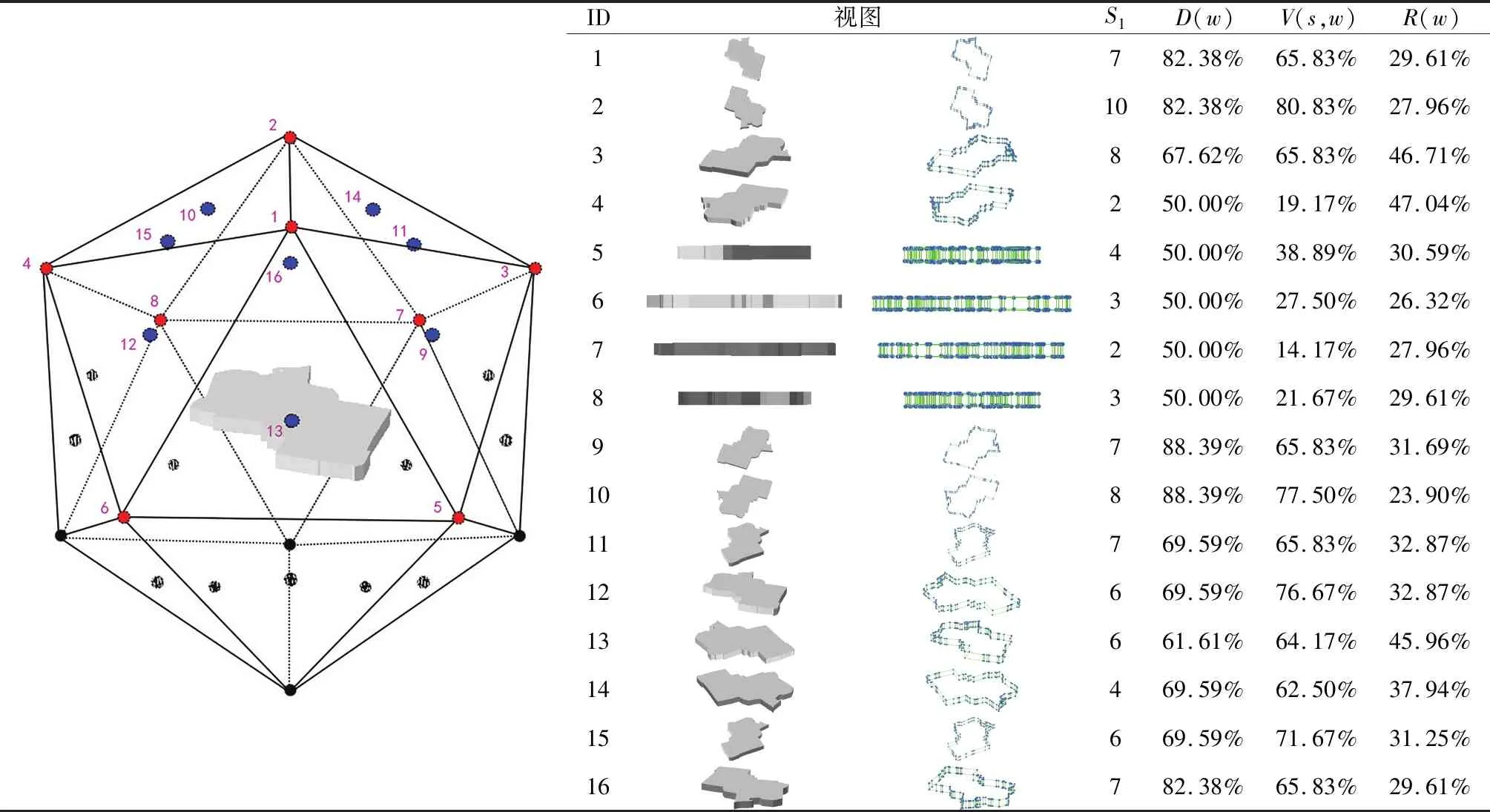
表2 模型b人工评分及特征因素数值Table 2 Artificial scoring and characteristic factor values of model b

表3 模型c人工评分及特征因素数值Table 3 Artificial scoring and characteristic factor values of model c
2.4 最优视点选择
利用上述三维地籍产权体最优视点选择模型对视点分值进行预测,得到视点人工评分和预测得分(图5)。由图5a可以看出,模型a视点10的人工评分和预测得分均为10分,且二者变化趋势大致相同,表明本文基于MLP预测出了适合该类三维地籍产权体的最优视点;从模型b(图5b)和模型c(图5c)的视点得分也可以看出,本文方法对于三维地籍产权体的最优视点选择具有良好的稳定性,符合人眼视觉感知的舒适性。
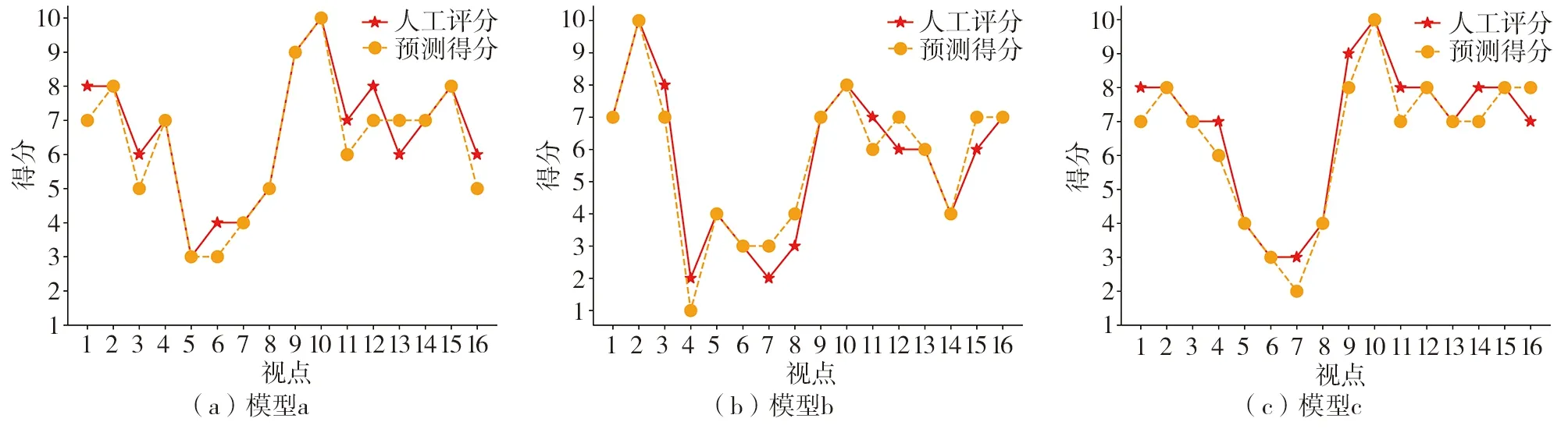
图5 基于多层感知器的三维地籍产权体最优视点选择Fig.5 Best viewpoint selection for 3D cadastral property units based on multilayer perceptron
2.5 不同方法对比
基于可见面片投影面积的视点质量度量方法[35]通过对某视点下观察到的产权体进行二维投影,对投影二维视图包含的信息进行分析和比较以衡量视点质量;Mortara方法[36]对候选视点进行人工评分,从而评价视点质量。将目前常用的上述两种最优视点选择方法与本文方法进行对比(表4)可知,本文方法的三维界址点可见性和可见面积比均优于Mortara方法,3个特征因素均优于基于可见面片投影面积的视点质量度量方法。

表4 不同方法对比Table 4 Comparison of various methods
2.6 三维宗地图输出
三维地籍建库的最终成果以图、表的形式呈现,三维宗地在垂直方向上包含权属信息,因此,三维宗地图输出时应将其顶面、正面、侧面以三视图的形式输出,以便全面、清晰地表达三维地籍产权体。相比随机选定的三维地籍产权体主图,利用本文方法生成三维宗地图(图6)可以更好地表达界址信息,符合人眼视觉感知特征,一定程度上降低了人为选定的工作量,提升了三维权籍制图的可读性。
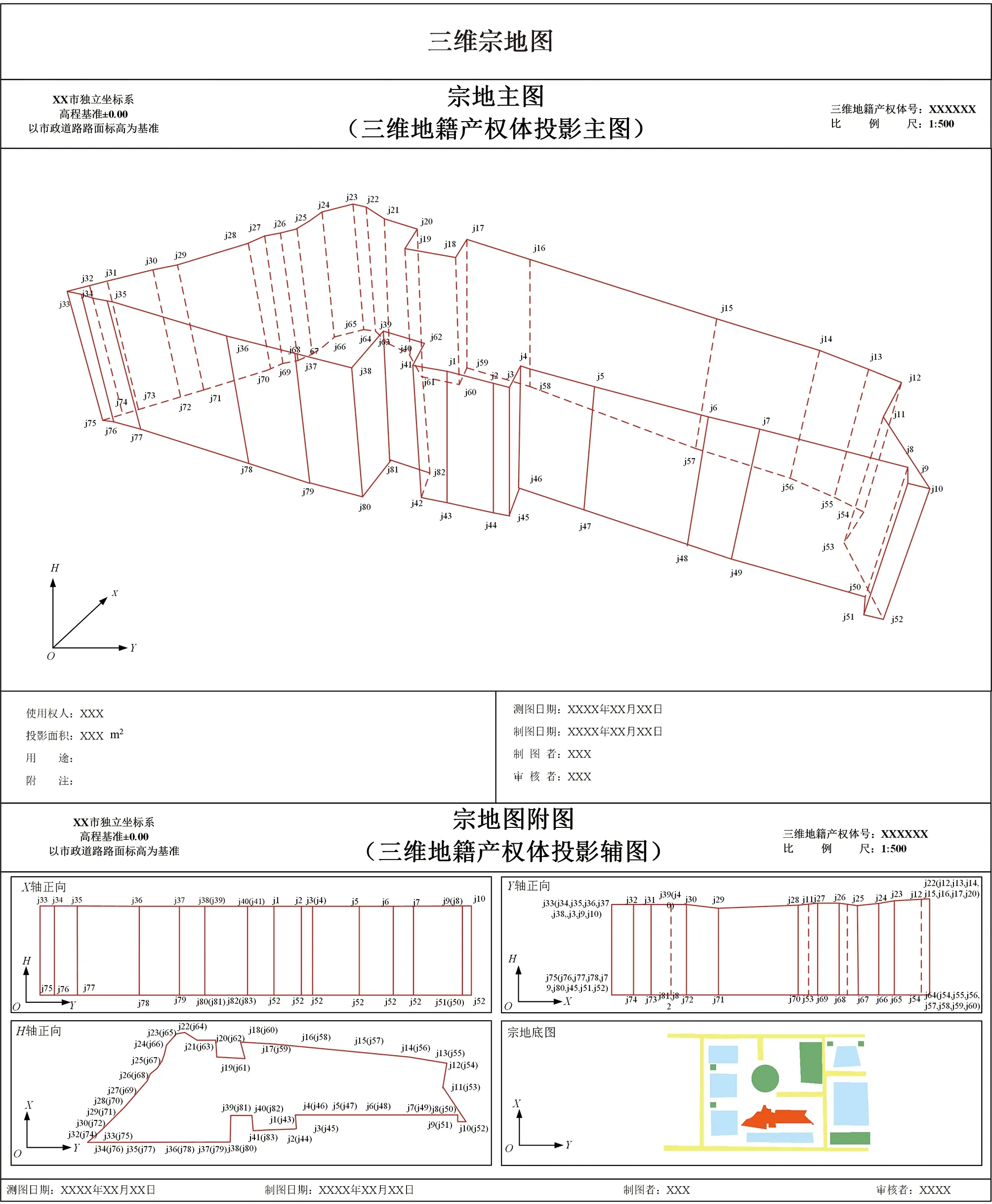
图6 三维宗地图输出效果Fig.6 Output effect of 3D land parcel map
3 结语
本文针对传统三维地籍制图难以满足三维地籍产权体结构多样、信息量传递有限的不足,提出顾及人眼视觉感知特征的三维地籍产权体最优视点选择方法。经过实验验证,该方法具有以下优点:1)选择三维界址点可见性和可见面积比作为特征因素,有效评价了某视点下三维地籍产权体包含的权籍信息量;2)对于特征因素的选择,同时考虑权籍信息量和视点的舒适性与美感,尽量接近人们观察物体常用的视点;3)引入多层感知器有效避免了局部最优解和权重值分配的问题,提高了算法的稳定性;4)最优视点下的视图可实现对正视图、侧视图、轴侧图的有效补充,以传递三维宗地图、三维产权图的更大视觉信息,提升三维地籍制图可读性。
本文仍存在不足之处:首先,采用包围三维地籍产权体正二十面体几何中心平面以上16个视点构建候选视点集合,可能会遗漏更好视点;其次,三维地籍产权体包括土地空间和房产空间,在现有的“房地合一”模式下,地籍产权体可以表示宗地单元,也可以表示房产单元,本文只针对宗地单元,后续研究应着重研究不动产单元三维模型的最优视点,同时综合考虑光照条件、材质信息等,使三维地籍产权体最优视点选择更准确、客观。
