Data-Driven Deep Learning for OTFS Detection
2023-02-02YiGongQingyuLiFankeMengXinruLiZhanXu
Yi Gong ,Qingyu Li ,Fanke Meng ,Xinru Li ,Zhan Xu,*
1 School of Information Communication and Engineering,Beijing Information Science and Technology University,Beijing 100876,China
2 School of Economics and Management,Xi’an University of Posts and Telecommunications,Xi’an 710100,China
3 Tianjin Yinyuan Information Technology CO.,LTD.,Tianjin 300202,China
Abstract: Recently,orthogonal time frequency space(OTFS) was presented to alleviate severe Doppler effects in high mobility scenarios.Most of the current OTFS detection schemes rely on perfect channel state information(CSI).However,in real-life systems,the parameters of channels will constantly change,which are often difficult to capture and describe.In this paper,we summarize the existing research on OTFS detection based on data-driven deep learning(DL) and propose three new network structures.The presented three networks include a residual network(ResNet),a dense network (DenseNet),and a residual dense network (RDN) for OTFS detection.The detection schemes based on data-driven paradigms do not require a model that is easy to handle mathematically.Meanwhile,compared with the existing fully connected-deep neural network (FC-DNN) and standard convolutional neural network(CNN),these three new networks can alleviate the problems of gradient explosion and gradient disappearance.Through simulation,it is proved that RDN has the best performance among the three proposed schemes due to the combination of shallow and deep features.RDN can solve the issue of performance loss caused by the traditional network not fully utilizing all the hierarchical information.
Keywords: data-driven;deep learning;OTFS;detection
I.INTRODUCTION
High-speed communication scenarios such as the Internet of vehicles(IoV),high-speed railways,and unmanned aerial vehicles (UAV) are crucial in future wireless communication systems.When the terminal is in high-speed motion,the channel exhibits properties of double-selective fading,including frequencyselective fading due to the multipath effect and timeselective fading due to the Doppler shift [1].The traditional orthogonal frequency division multiplexing(OFDM) technology can resist inter-symbol interference (ISI) [2].However,in the time-selective channel,the high Doppler shift would cause inter-carrier interference (ICI),which results in a significant performance penalty[3].
Different from the OFDM technology,the orthogonal time frequency space (OTFS) [4] is a waveform designed in the delay-Doppler(DD)domain.The DD domain channel response directly represents the aggregate characteristics of various channel reflectors in the wireless communication environment [5].Moreover,the fast-changing channel is transformed into the DD domain by OTFS[6].Therefore,all symbols of a unit experience a nearly identical and slowly varying channel response[7,8].Meanwhile,the OTFS system can be realized by adding a preprocessing module and a postprocessing module based on the current timefrequency(TF)domain multi-carrier technology such as OFDM.In this way,OTFS technology ensures great compatibility with current systems[9,10].Moreover,the signal detection scheme is crucial to take full advantage of the OTFS system.
1.1 RELATED WORK
In [11],the unitary transform was used to update the time and DD domain’s external information to realize cross-domain signal detection.The least squares minimum residual detection scheme for the OTFS system was proposed in [12].An improved message passing (MP) detection scheme was shown in [13],which applied matched filtering to reduce the complexity.In [14],a maximal ratio combining (MRC)-based OTFS detection scheme was proposed.A vector approximate message passing(VAMP)-based scheme was presented for OTFS iterative detection in literature [15].In [16],a variational Bayesian approach was applied to iteratively maximize the evidence lower bound(ELBO),which enabled low-complexity maximum a posteriori (MAP) detection.In the literature[17],two improved detection schemes of MP algorithms were proposed,including the iterative combining MP(ICMP)and turbo MP(TMP).In[18],a unitary approximate message passing(UAMP)OTFS detector was proposed.
However,those signal detection schemes for OTFS systems often require accurate channel state information (CSI).In real-life wireless communication systems,the channel conditions change rapidly.And most channel environments are nonlinear,which is difficult to be characterized by analytical mathematical models[19,20].Therefore,it is challenging to establish accurate mathematical models of wireless channels.Even worse,in some scenarios,such as underwater wireless optical communication(UWOC)and molecular communication,no unified and analytically tractable channel model currently exists to study[21].
Deep learning(DL)is widely used for signal detection in wireless communication systems.Furthermore,data-driven DL-based schemes expressing the implementation of receivers as automatic decoders,which can jointly consider multiple receiver modules,have been extensively studied recently.Data-driven DLbased signal detection schemes can reconstruct the transmitted signal without explicit channel estimation.In addition,signal detection schemes based on datadriven DL do not need a model that is easy to handle mathematically.The data-driven DL enables efficient data feature extraction directly from large amounts of data,essentially avoiding the issues posed by channel modeling[19].Meanwhile,the data-driven DL-based signal detection schemes are robust to the variation of channel parameters and are effective solutions to process the channel uncertainty[22].
In previous studies [23],we proposed a fully connected-deep neural network (FC-DNN)-based scheme for OTFS detection and achieved better performance than the traditional minimum mean square error(MMSE)detection algorithms.However,the fully connected structures adopted by the FC-DNN network require many parameters to be trained.This leads to a sharp increase in the demand for the training time and the amount of training data.Furthermore,the FCDNN is only applied to deal with the one-dimensional signals,and the local correlation between the delay and Doppler domains cannot be well utilized.
Therefore,followed by a convolutional neural network(CNN)was presented for OTFS detection in our previous work[24].To take full advantage of the local correlation between the delay domain and the Doppler domain,we choose three-dimensional data as the input.The first and second dimensions are the values in the Doppler domain and delay domain of the DD domain received signal,respectively.The third dimension is the superposition of the real and imaginary parts of the signal.The CNN-based OTFS detection scheme has better performance than the FCDNN-based detection scheme.
1.2 Our Contributions
This paper organizes existing OTFS detection schemes based on data-driven DL.In data-driven schemes,directly learning and optimizing the parameters of the DL model just from the received signal without being affected by the accuracy of the channel model.In addition to the already proposed schemes based on FCDNN and standard CNN,we propose three new network structures for OTFS detection.The presented networks include a residual network(ResNet),a dense network (DenseNet),and a residual dense network(RDN).These three schemes can well alleviate the gradient explosion and gradient disappearance problems in FC-DNN and CNN to achieve better performances.Meanwhile,these DL-based schemes have good robustness to the parameter variation of the wireless channel.Among the proposed three schemes,the RDN has the best performance.The presented RDN comprises a dense feature fusion (DFF) module and multiple residual dense blocks (RDBs).RDB is used to fuse features locally adaptively,and the DFF module adopts global residual learning and global feature fusion (GFF) to fuse global features adaptively.The output of any RDB can directly access any layer of the latter RDB and then obtain a continuous state for transmission.Through simulation,the performances of the presented OTFS detection schemes are demonstrated and the excellent robustness of the data-driven DL-based OTFS detectors is also proved.
The main contributions are summarized as follows:
• We summarize the OTFS signal detection schemes based on data-driven DL.Due to the adoption of the data-driven paradigm,the proposed DL-based OTFS detectors enable efficient data feature extraction directly from large amounts of data and can essentially avoid the issues posed by channel modeling.
• We first propose a ResNet-based OTFS detection scheme.By calculating residuals,the ResNet has the advantage of being easy to learn and optimize.The proposed ResNet can alleviate the gradient explosion and gradient disappearance problems in traditional FC-DNN-based and standard CNNbased OTFS detectors through skip connections.
• We second propose a DenseNet-based OTFS detection scheme.The proposed DenseNet directly connects all layers,which enhances feature reuse feature propagation.Compared with ResNet,the proposed DenseNet better alleviates the vanishing gradient problem.
• We third propose an RDN-based OTFS detector.RDBs of the proposed RDN are applied to extract local features,and then the DFF module is used to perform hierarchical feature extraction and global feature fusion.Through this,the proposed RDN can solve the problem of performance loss caused by traditional networks not fully utilizing underlying hierarchical features.
II.SYSTEM MODEL
Here we introduce the basic principles of OTFS.As shown in Figure 1,OTFS modulation consists of inverse symplectic-finite Fourier transform(ISFFT)and Heisenberg transform,and OTFS demodulation consists of Wigner transform and SFFT[4].

Figure 1. OTFS modulation and demodulation process.
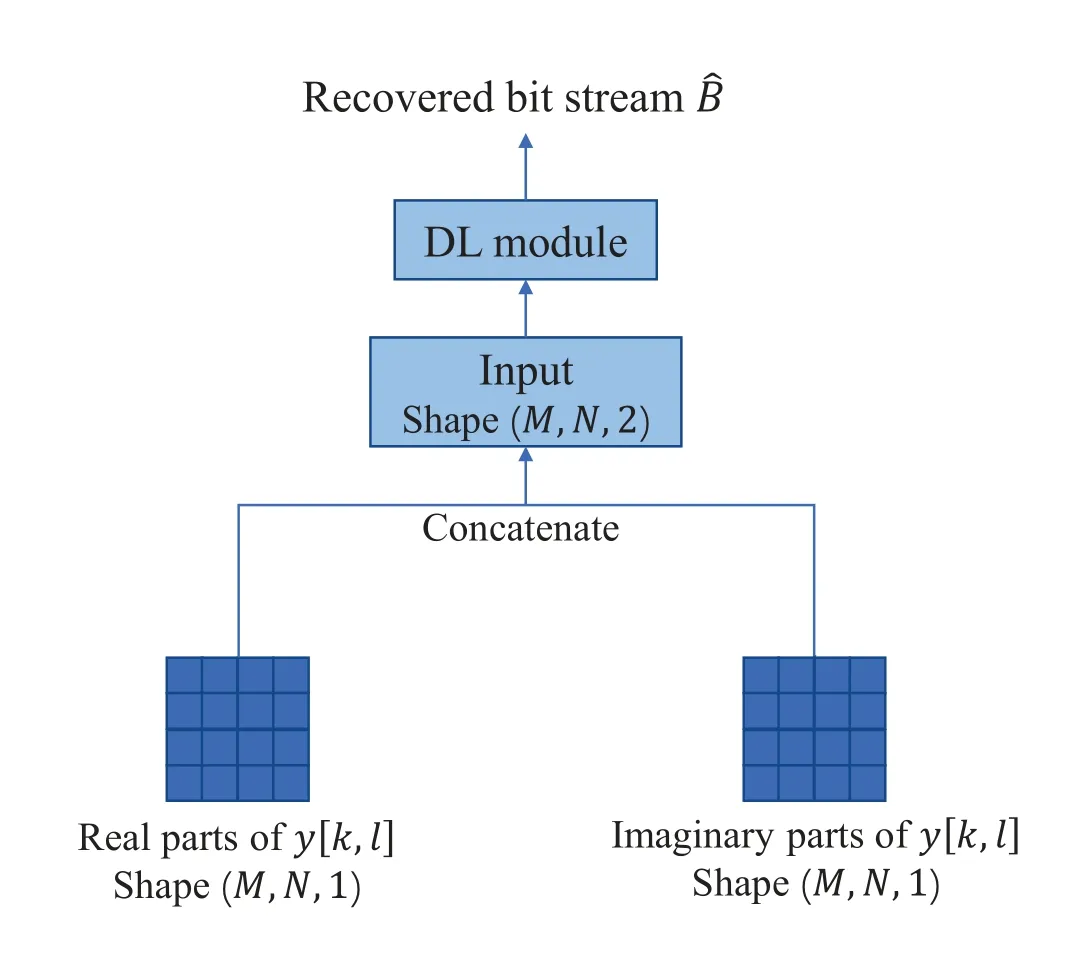
Figure 2. Shape of the input signal.
The principle of the ISFFT module is represented as
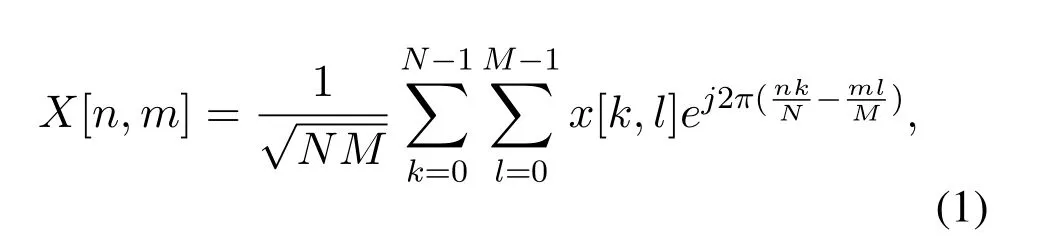
whereNandMrepresent the quantity of symbols and subcarriers,andx[k,l] is the DD domain transmitted signal.
The process of the Heisenberg transform module is represented as
wheregtx(t)represents the transmit pulse,ΔfandTrepresent the subcarrier spacing and the duration,respectively.
s(t)passes through the wireless channel can be expressed as
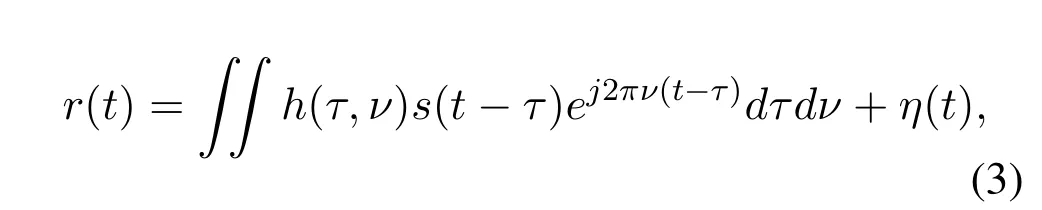
whereη(t)represents the Gaussian noise,h(τ,ν)represents the channel.The transmitted signal arrives at the receiver along multiple paths,each with its own delay and Doppler shift.AssumingPpropagation paths in wireless communication systems,h(τ,ν) is expressed as
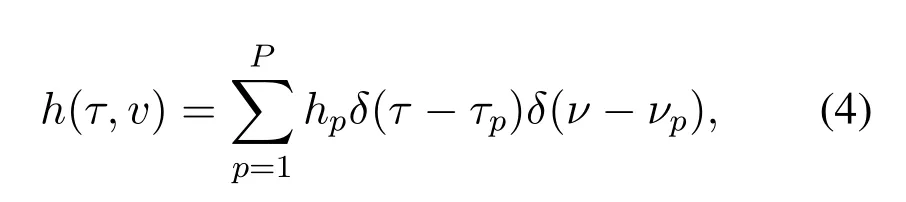
wherehp,τp,andνprepresent the channel gain,delay,and Doppler shift of thep-thpath,respectively,where we have
The Wigner transform is used to receive the signal.Firstly,the cross-ambiguity function ofr(t) and the received pulsegrx(t)is computed,which is written as

Next,the second step is samplingY(t,f),which is represented as

The principle of the SFFT module is represented as
By [25,26],the relationship betweenx[k,l] andy[k,l]is represented as
whereω[k,l] is the DD domain effective channel noise,andNiis an integer(Ni <N).
As equation (10) shown,y[k,l] can be viewed as a circular shift withx[k,l] scaled by the corresponding channel gain.x[k,l],y[k,l],and effective channel noiseω[k,l] are converted to vector formsx ∈CMN×1,y ∈CMN×1,andω ∈CMN×1,respectively.The equation(10)can be represented in terms of vectors[18]as

whereHis the effective channel response.
III.PROPOSED DL-BASED OTFS DETECTION SCHEMES
3.1 Shape of the Input Data
Firstly,the details of the input data of the proposed neural networks are demonstrated.The symbols of OTFS systems are multiplexed in the two-dimensional DD domain,and the DD domain symbols have local correlations in the delay domain and Doppler domain.Therefore,two-dimensional convolutional layers are chosen to build our networks.The two-dimensional convolution kernels operate in the delay dimension and Doppler dimension.
The input data of the presented neural networks is shown in Figure 2.The real part and imaginary part ofy[k,l] are superimposed as two channels,so that DD domain complex-valued data are converted to real values to obtain the inputD ∈RM×N×2.In this way,kernels in convolutional layers can better learn the correlations in the input data.
3.2 Structure of the Presented Three DLbased OTFS Detectors
The architectures of the presented OTFS detection algorithms based on ResNet,DenseNet,and RDN are shown in this subsection.The input signal is introduced in the previous subsection,which isM×N×2.The output data of all three DL-based detectors is the recovered transmitted bit stream.
3.2.1 ResNet-based OTFS Detection
Here,we introduce the proposed OTFS detection scheme based on ResNet.
The structure of the presented ResNet is shown in Figure 3.The input to the ResNet isD.When the signal is input,there is a two-dimensional convolutional layer,in which the two-dimensional convolution operates over the delay and Doppler dimensions.The operation of the convolutional layer can be represented as

whereC0is the extracted feature,Fconvstands for the operation of the convolutional layer,andDis the input data.The kernel of this convolutional layer is 3×3,and the number of kernels isQ0.Then there are seven residual blocks,whose structures are shown in Figure 4.The ResNet is characterized by establishing connections between convolutional layers using skip connections.Through the skip connections,the ResNet can effectively alleviate the gradient disappearance,and gradient explosion problems of standard CNN[27].By ignoring the common information between the input and the target,residual blocks focus on learning the mapping from the input to the residual,so as to reduce the learning difficulty and improve the learning efficiency[28].The operation of the residual block can be expressed as
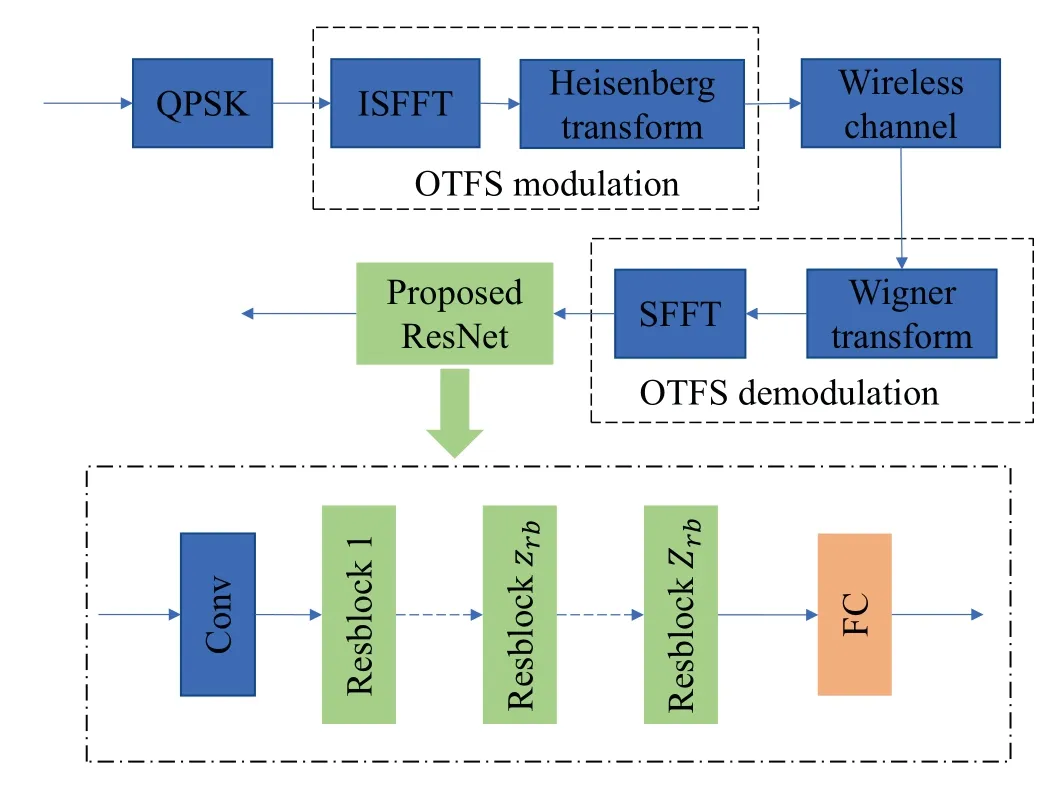
Figure 3. Structure of the proposed ResNet-based OTFS detector.
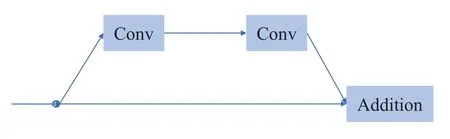
Figure 4. Structure of the proposed residual block.

Figure 5. Structure of the proposed DenseNet-based OTFS detector.
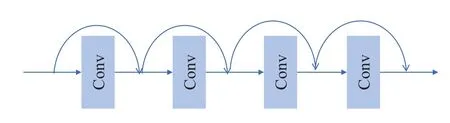
Figure 6. The structure of the proposed dense block.

whereCrb(x)represents the extracted feature by residual block,F(x) denotes the output of two convolutional layers,andxis the input of the residual block.In this way,the network degradation problem and gradient disappearance problem due to the increase of layers in the deep neural network are alleviated,and the performance of the network is effectively improved.All convolutional layers in theZrbresidual blocks use kernels of size 3×3,and the quantity of kernels isQrb.In addition,each convolutional layer of the ResNet is followed by a ReLU as the activation function.The input to the final fully connected layer is the output of the last residual block,which is represented as

whereCZrbandFZrb(.) represent the features extracted and the operation from theZrbresidual block,CZrb-1denotes the features extracted from theZrb-1 residual block.The fully connected layer is applied to integrate the features extracted by residual blocks,which can complete the recovery of the bitstream as

wherewFC,RNandbFC,RNis the weight and bias of the fully connected layer in the proposed ResNet,respectively.RNrepresents the recovered bit stream by the ResNet.
3.2.2 DenseNet-based OTFS Detection
Then,there are three dense blocks after the convolutional layer.The structure of the dense blocks is shown in Figure 6.The characteristic of the dense block is to establish connections between convolutional layers through dense connections.The output of each layer is applied as the input of all subsequent layers.In this way,the feature information of each layer in the network can be used maximally.Each dense block of the presented DenseNet has four densely connected convolutional layers.The operation of the dense block can be expressed as

where([C0,C1,...,Cn-1])represents the concatenation of the output features from the first layer to then-1th layer,Gnis a nonlinear conversion function[29].This design makes the transfer of features and gradients in the network more efficient,and the feature maps can be fully utilized.After both the first and second dense block is a transition layer.The transition layer consists of a convolutional layer and a pooling layer,which is used to compress the network.The operation of a transition layer is represented as

whereFpoolingandF1×1Convrepresent the operations of a pooling layer and a 1×1 conventional layer,respectively,CtransitionandCdbdenote the features output by the transition layer and a dense block,respectively.Meanwhile,Ctransitionis also utilized as the input for the next dense block.
The end of the presented DenseNet is a fully connected layer with 2×M ×Nneurons,which can be represented as

wherebFC,DNandwFC,DNdenote the bias and weight in the fully connected layer,DNdenotes the recovered bit stream by the proposed DenseNet,Zdbis equal to 3,andCZdbrepresents the feature extracted by the last dense block.All convolutional layers in the presented DenseNet containQdbkernels.Except that the convolutional layer of the transition layer is 1×1,the 3×3 convolutional layer is used in other structures.Similarly,each convolution layer is followed by a ReLU function.
3.2.3 RDN-based OTFS Detection
Here,the architecture of the presented data-driven RDN-based detection algorithm for OTFS is introduced.The proposed RDN is utilized to process the received DD domain signal.The framework of the RDN-based OTFS detection is shown in Figure 7.The presented RDN consists of one convolutional layer,multiple RDBs,the DFF module,and one fully connected layer.The convolutional layer at the beginning of the RDN is used to extract preliminary features as shown in equation(12).
The proposed RDN employsZrdbRDBs to extract hierarchical features,and the output of thezrdb -thRDB is represented as
The queen gave orders that everything should be done as she desired; and then the maiden dressed herself in seven clean snow-white shirts, and held her wedding with the lindorm

whereFRDB,zrdbdenotes the operation of thezrdbthRDB.
The structure of RDBs in the presented RDN is shown in Figure 8.RDB is a module constructed by combining residual learning and dense connection,which enhances feature reuse and helps to extract the deep features of the proposed RDN fully.An RDB consists of three parts: local feature fusion (LFF),densely connected layers,and local residual learning.The densely connected layer is used to extract local features.In the densely connected layers,the information fusion of each layer will combine the input of all previous layers,and the features of the current layer will be propagated to all subsequent layers using a cascade method,which is more efficient[30].It can effectively alleviate the disappearance of gradient and strengthen the propagation of all features so that the probability of feature reuse is greater.The output of theq-thconvolutional layer of thezrdb-thRDB is written as
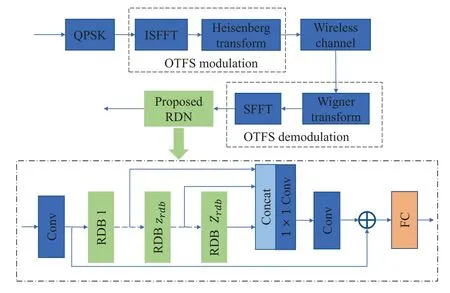
Figure 7. The architecture of the proposed RDN-based OTFS detection.
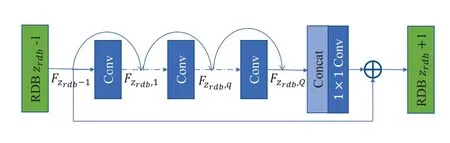
Figure 8. The structure of the proposed RDB.
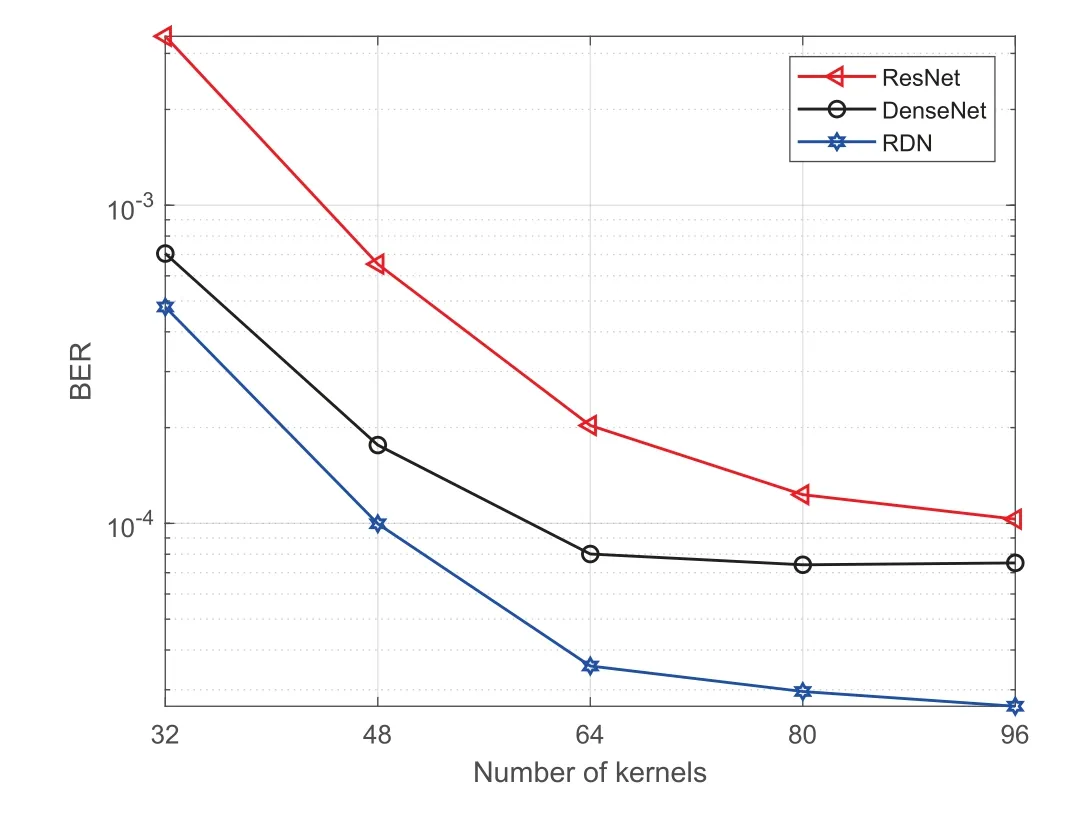
Figure 9. BER curves of the three DL-based OTFS detectors with different number of kernels.

Figure 10.BER curves of the five DL-based OTFS detectors with different amount of training data.
wherewzrdb,qandbzrdb,qis the weight and bias of theq -thconvolutional layer of thezrdb -thRDB,respectively.fis the activation function,and we choose ReLU as the activation function in the proposed RDN.It can be seen from equation(14)that the features extracted by the previous RDB and the output of each layer of this RDB are directly connected to all subsequent layers.This extracts the local features while preserving the feedforward characteristics.
Dense connections stitch together the features extracted from each layer as input to subsequent modules.However,if these feature maps are directly sent to subsequent modules,it will significantly increase computational complexity.In order to more efficiently and fully utilize the feature information conveyed by dense connections,the RDB adopts an LFF module.In the LFF module,a 1×1 convolutional layer is applied to adaptive feature extraction and makes each channel complement each other’s feature information[31].In addition,the LFF module can also make the network easy to train.The output of the LFF module is represented as

Since multiple convolution operations exist in each RDB,to make the information flow be further improved in the network and promote the transfer of information and gradients,a local residual learning layer is added after the LFF layer.The local featureCzrdb,LFis then superimposed on the output of thezrdb -thRDB with residual skip connections to simplify further the network learning process,which can be expressed as

The next step is to fuse the hierarchical feature information extracted by all RDBs at the global level.In the GFF module,the spliced feature maps are dimensionally reduced and fused through a 1×1 convolution operation,and then a 3×3 convolutional layer performs further feature extraction on the fused feature map to obtain deeper feature information.The output of the GFF module is written as

whereFGFFdenotes the operation of a 1×1 convolution layer and a 3×3 convolutional layer,[C1,...,CZrdb]is the feature extracted by the 1-thRDB to theZrdb-thRDB.
Then,by using the global residual learning operation to fuse the original input with the extracted features,richer deep features are obtained as

Finally,one fully connected layer is used to extract all features of the global residual learning module without causing information loss,which can achieve the recovery of transmitted bit stream as shown as

wherewFCandbFCis the weight and bias of the fully connected layer,respectively.ˆBrepresents the recovered bit stream.
IV.SIMULATION RESULTS
4.1 Parameters Selection and Setting
Firstly,we analyze the parameters of the presented ResNet,DenseNet and RDN.The RDN includes three RDBs,with four densely connected convolutional layers in each RDB.In this way,the three presented networks in simulation have approximately the same number of convolutional layers.Next,the number of kernels in the convolutional layers of the three networks is discussed.The bit error rate (BER) performances of three presented DL-based schemes with different numbers of convolution kernels are simulated.In this simulation,we choose the SNR of 20 and EVA channel[32].
As shown in Figure 9,when the quantity of kernels in convolutional layers is less than 64,the performances of the presented three networks increase significantly with the number of kernels.However,with the number of kernels greater than 64,the BER performances of the DenseNet and RDN hardly increase with the quantity of kernels.Meanwhile,the performance of the presented ResNet only increases slightly with the increase in the number of kernels.Therefore,the convolutional layers with 64 kernels are selected for the three presented networks.In addition,except that the kernel size of the convolutional layer used for LFF and GFF is 1×1,other convolutional layers apply 3×3 kernels.The number of neurons in the fully connected layer is the same as the number of bits in a frame at the transmitter,which is 2048 in this paper.
Then,the training data requirements of the data-driven DL-based OTFS detection schemes are analyzed.We simulate BER performances of five DLbased OTFS signal detection schemes with an SNR of 20 under different training set sizes in the EVA channel.The five schemes include two traditional FC-DNN-based and standard CNN-based schemes,and the proposed ResNet-based,DenseNet-based,and RDN-based schemes.The adopted FC-DNN is a classic five-layer network including three hidden layers,and its specific parameters are shown in Table 1.The standard CNN includes 15 convolutional layers and a fully connected layer,and its detailed parameters are shown in Table 2.As shown in Figure 10,standard CNNs and ResNets require the smallest amount of training data to achieve optimal performances,and the training set size is about 45,000.Due to the convolutional layer’s local connection and weight sharing,the number of parameters of these two networks without dense connection structures is small.While the FC-DNN,DenseNet,and RDN require a large amount of training data,their optimum performances are achieved at a training set size of about 60,000.This is reasonable considering that the numbers of trainable parameters of the adopted FC-DNN,DenseNet,and RDN are larger than that of the other two networks.Both fully connected and densely connected structures will increase the number of parameters[33].In summary,a training set number of 45,000 is chosen for simulation.
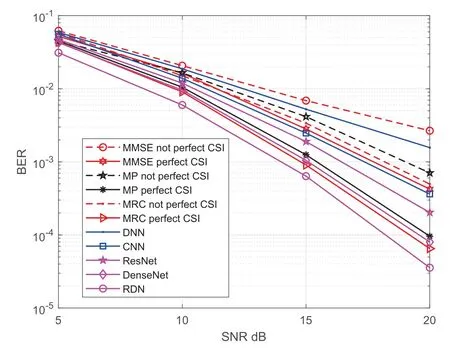
Figure 11. BER performances of the OTFS detectors in the EVA channel.

Figure 12. BER performances of the OTFS detectors in the TDL-B channel.
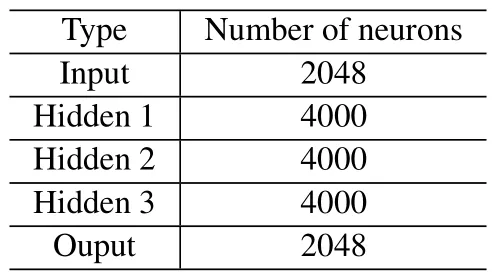
Table 1. Parameters of the applied FC-DNN.
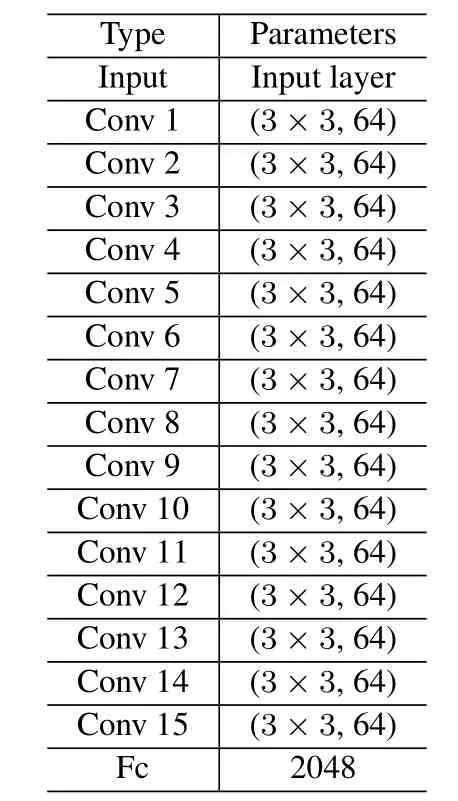
Table 2. Parameters of the applied standard CNN.
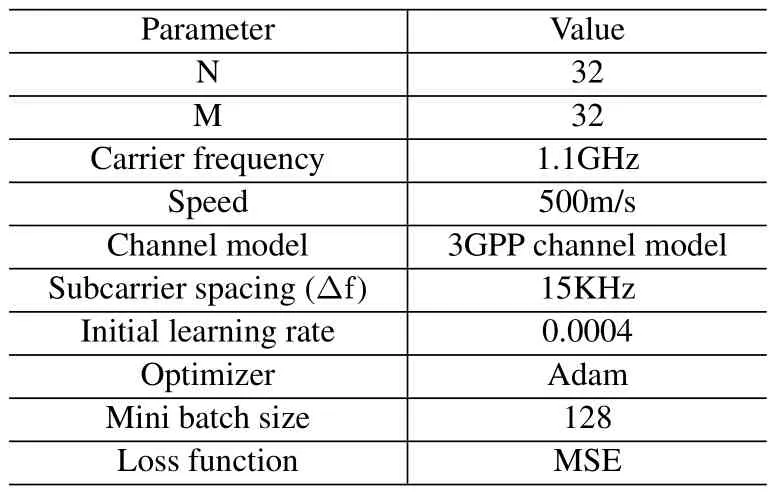
Table 3. Simulation parameters.
4.2 Performance Comparison
Here,the BER performances of the presented DLbased OTFS signal detection schemes are analyzed.Three traditional OTFS detection algorithms are used as comparison schemes under perfect CSI,including minimum mean square error(MMSE),MP,and MRC.In addition,considering that perfect CSI is impractical in real-life wireless communication systems,the three traditional OTFS signal detection schemes in imperfect CSI are also applied as comparison schemes.Theapplied CSI error model[34]can be expressed as
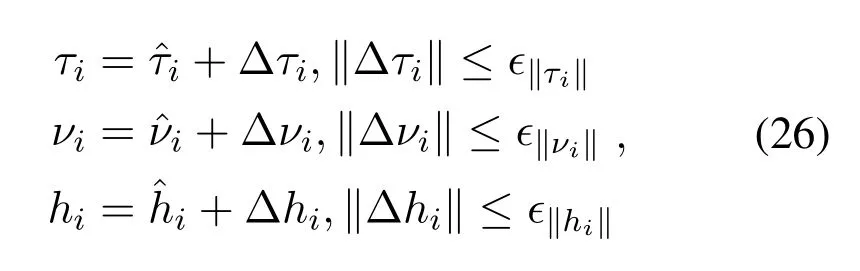
where Δτi,Δνi,and Δhiare the channel estimation errors,ϵ‖τi‖,ϵ‖νi‖,andϵ‖hi‖are the error bounds.We chooseϵ=0.04 in simulation,which is a moderate error[17].
Specific simulation parameters are demonstrated in Table 3.
Then,the BER performances of those OTFS signal detection schemes in the EVA channels are simulated.As shown in Figure 11,the data-driven FCDNN-based detection scheme outperforms the MMSE algorithm with imperfect CSI.However,the FC-DNNbased scheme has the worst performance of the five data-driven DL-based schemes because it is prone to obtain local optimal solutions.The performances of the CNN-based,ResNet-based,DenseNet-based,and RDN-based algorithms all outperformed those of the three traditional methods with imperfect CSI.This demonstrates the advantage that the data-driven paradigm is not affected by channel estimation errors.In addition,the BER performance of the standard CNN-based OTFS signal detection is not as good as that of the ResNet-based,DenseNet-based,and RDNbased schemes.Since the standard CNN has serious gradient explosion and gradient disappearance problems,which are especially obvious in deep networks.Likewise,the proposed ResNet-based OTFS detection schemes outperform the MMSE-based OTFS detector.The performance of the DenseNet-based OTFS detector is close to that of the MP and MRC algorithms under the EVA channel.Moreover,the RDN-based scheme outperforms other OTFS detectors.When the BER is×10-4,the presented RDN-based detection algorithm can achieve a 1dB and 2dB performance gain compared to the MRC-based and MP-based OTFS detection algorithms under perfect CSI,respectively.
In order to better reflect the channel features of the band of the fifth-generation(5G)system,3GPP modeled a channel model with the applicable frequency range from 0.5 GHz to 100 GHz [35].The channel model provides high-resolution characteristics of electromagnetic wave propagation angle and delay.For the current 5G system,this model can accurately reflect the propagation characteristics of electromagnetic waves.We study the performance of the eight signal detection algorithms in the TDL-B [35] channel,and the simulation results are demonstrated in Figure 12.Similar to the results obtained for the EVA channel,the performances of the proposed three OTFS detectors based on ResNet,DenseNet,and RDN are better than those of the traditional MMSE,FC-DNN,and standard CNN in the TDL-B channel.Among all OTFS detectors,the MP-based algorithm has the most degraded performance.This result is reasonable considering that the MP algorithm does not guarantee convergence in TDL-B channels with a higher number of paths.Meanwhile,the complexity of the MP algorithm increases significantly as the number of paths adds.Therefore,the MP algorithm is only suitable for scenarios where the number of channel paths in the scenario is small.The DenseNet-based detectors are slightly weaker than the RDN-based algorithm and MRC-based algorithm with perfect CSI,and significantly better than other detectors.The proposed RDNbased scheme still outperforms the conventional MRC algorithm under TDL-B channel.Meanwhile,the complexity of those data-driven DL-based solutions is independent of the number of paths,so these DLbased detectors are suitable for scenarios with both small and large numbers of channel paths.
4.3 Robustness
In real-life wireless communication systems,the parameters of channels are constantly changing.Therefore,the DL-based OTFS detectors need to have good robustness to the variations of channel parameters before they can be applied to real-life communication systems.The data-driven DL-based schemes were shown to have excellent robustness in the past[36,37].The robustness of the five OTFS detection schemes based on data-driven DL is investigated in the following experiments.
First,we study the robustness to channel mismatch of the five OTFS detection schemes based on datadriven DL.All the five networks are trained in the ETU[32]channel and tested in the EVA channel.The baseline schemes are that the five networks are both trained and tested in the EVA channel.As shown in Figure 13,the performance degradations of the five DL-based signal detection schemes are low when the channels are mismatched.For example,when the BER of the proposed RDN-based detector is 2.2×10-5,the difference of channel mismatch is only 0.4dB compared to the case of no mismatch.It proves that the OTFS detection schemes based on data-driven DL have excellent robustness to channel mismatch.
OTFS was presented to solve the communication problem caused by the Doppler shift in high mobility scenarios.In high mobility cases,the speed tends to be constantly changing.Therefore,these DL-based OTFS detection schemes must be robust to speed changes before they can be applied to reallife systems.Here,we study the robustness to speed changes of the detection schemes based on data-driven DL.All the five DL-based schemes are trained in the EVA channel with a speed of 500km/h and tested in the EVA channel of 300-700km/h.Simulation results are shown in Figure 14.As shown,all the five algorithms show that the BER performances vary little with speed,proving that the presented schemes have good robustness to channel parameter variations.
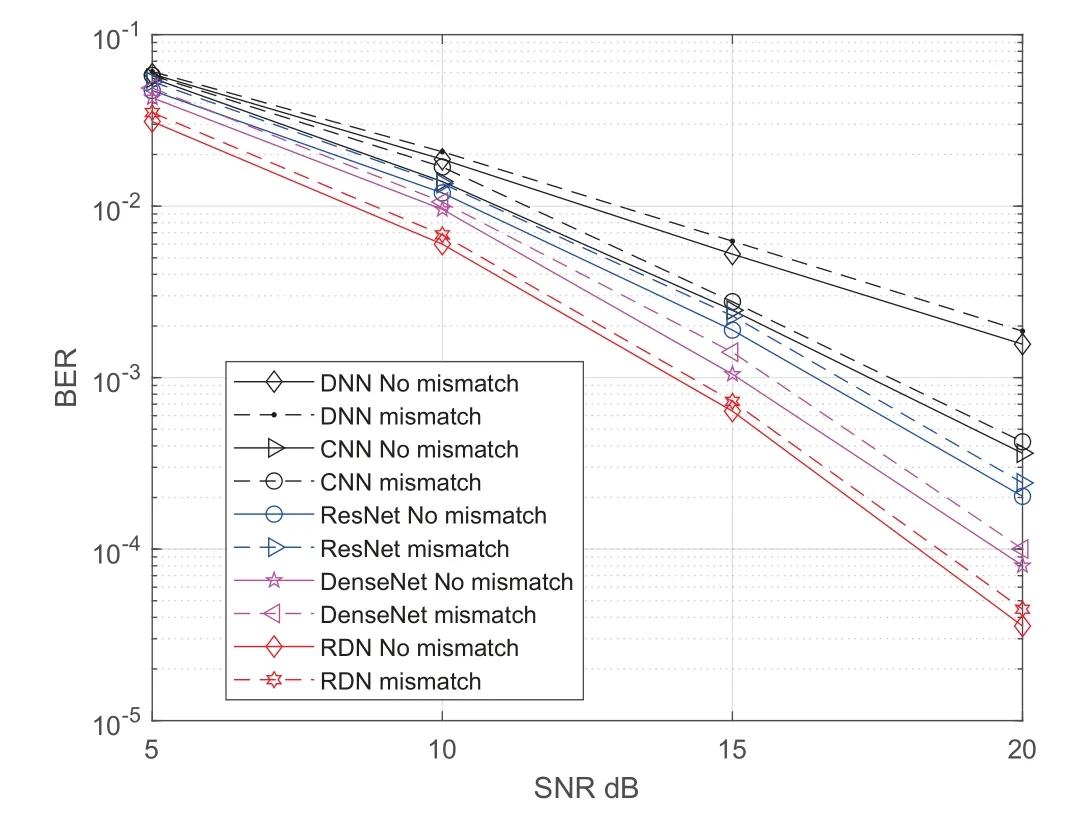
Figure 13. BER performances of the five DL-based OTFS detectors with channel mismatch.

Figure 14. BER performances of the five DL-based OTFS detectors in different speeds.
4.4 Complexity Analysis
Considering that the time requirements for offline training are relatively loose,the complexity of offline training is not the main problem[38].
In the online test phase,the computational complexity of a convolutional layer iswhereMNis the block size in OTFS system,Kiis the kernel size of thei -thconvolutional layer,Fi-1is the quantity of kernels in the previous layer,andFirepresents the quantity of kernels in the current layer.The computational complexity of a fully connected layer isO(Qi-1Qi),whereQi-1andQiare the numbers of neurons in the previous layer and current layer,respectively.Hence,the computational complexity of the presented three networks is,whereQis the quantity of neurons in the fully connected layer andIis the quantity of convolutional layers.The asymptotic complexity of all the three presented networks isO(MN),which is linear in block size of OTFS systems.
V.CONCLUSION
In this paper,we organize the existing OTFS detection scheme based on data-driven DL and propose three new network architectures,including ResNet,DenseNet,and RDN for OTFS detection.The proposed three network structures can alleviate the gradient explosion and gradient disappearance problems existing in the traditional FC-DNN and standard CNN to achieve better performance.The proposed RDN extracts local features through each RDB,and then the DFF module performs hierarchical feature extraction and global feature fusion to achieve better performance.Simulation results show the great performance of the proposed three OTFS detection schemes compared to traditional ZF,MMSE,and MP,and RDN performs the best.We also show that the performances of the data-driven DL-based schemes vary little with channel mismatch and channel parameter variation,demonstrating their excellent robustness.
ACKNOWLEDGEMENT
This work is supported by Beijing Natural Science Foundation (L223025),National Natural Science Foundation of China (62201067),R and D Program of Beijing Municipal Education Commission(KM202211232008);The authors would like to thank the Key Laboratory of Modern Measurement and Control Technology,Ministry of Education,Beijing Information Science and Technology University,and the Key Laboratory of Modern Measurement and Control Technology,Ministry of Education,Beijing Information Science and Technology University,Beijing,China.
杂志排行

China Communications的其它文章
- Secrecy Transmission of NOMA-OTFS Based Multicast-Unicast Streaming
- Orthogonal Time Frequency Space Modulation in 6G Era
- Joint Multi-Domain Channel Estimation Based on Sparse Bayesian Learning for OTFS System
- BER Performance Analysis of OTFS Systems with Power Allocation
- OTFS-Based Efficient Handover Authentication Scheme with Privacy-Preserving for High Mobility Scenarios
- Channel Estimation for OTFS System over Doubly Spread Sparse Acoustic Channels