磁悬浮轴承电容传感器*
2023-02-02陶加杨徐龙祥
陶加杨, 徐龙祥
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引 言
磁悬浮轴承系统中转子由磁场力支承,轴承和转子之间没有接触,因此没有机械磨损,无需润滑,通过主动控制,可以实现稳定的悬浮[1]。在该闭环控制系统中,用于反馈的信号是多样的,位移、电流、速度、磁通量、电磁力等物理量均可以作为反馈控制信号[2],目前磁悬浮轴承多采用位移传感器。由于磁轴承的悬浮特性,要求传感器是非接触式位移传感器。常用的非接触式位移传感器有电涡流式、电感式、电容式以及光电式等[3],而目前国际上使用的磁轴承系统大都采用电涡流传感器。电容式传感器虽然也是典型的非接触式位移传感器,但在磁悬浮轴承系统中需要将被测目标即旋转轴作为动极板,这使得电极的引出非常困难,并且可能会降低其可靠性,限制了电容传感器在磁悬浮轴承位移检测中的应用[4]。另外,浮地检测会导致传感器的输出零点和灵敏度的改变,甚至会引起随时间变化的噪声信号[5]。
本文提出使用同面散射式电容传感器作为磁悬浮轴承位移检测,通过印刷电路板工艺,将两电极制作于同一平面[6],成功解决了磁悬浮轴承电容传感器引线引出的问题。对于浮地检测,通过电路设计,使两电极的激励信号为同幅反相的激励信号,能够很好解决由于浮地带来的灵敏度改变等问题。
1 结构设计
1.1 基本原理
根据平行板电容传感器的测量原理可知,在如图1(a)所示的电容两极板之间加一金属物体,电极面积为A,在忽略电极的边缘电场的影响时,两电极之间的电容值计算公式为C=ε0εrA/2d。由公式知,传感器的电容值与金属的位置无关,在极板间距一定的情况下,电容值只与金属的厚度有关系。将图1(a)从中间剖开,并分别向两端旋转90°,得到如图1(b)所示的一种新的电容传感器结构,图1(a)中金属物体的厚度变化2δ在图1(b)中等效于被测物体靠近或远离电极的距离为δ,因此通过简单的结构变化,将图1(a)中用于测量金属厚度的传感器变化为测量金属位移的传感器,同时在不考虑电极边缘效应的情况下,灵敏度将缩小1倍。
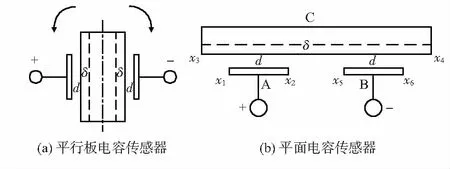
图1 电容传感器基本原理
在考虑边缘效应的情况下,电极A,B之间的电容将变得更加复杂,除了有通过被测物体产生的电容CAC,CBC,还有由于电极边缘效应产生的电容CAB1和CAB2,其中,CAB1为传感器正面的电容,CAB2为传感器背面的电容,与传感器基底有关。设电极长度为L,其计算公式分别为[7,8]
(1)
CAC=CBC
(2)
由于磁悬浮轴承系统中,悬浮气隙一般在500 μm的范围之内,通过上式计算可以发现在该范围内CAB1远小于CAC和CBC,因此CAC和CBC起主导作用。根据实际情况x4≫x1,x2≫x3,x1≫x3,x4≫x2式(2)可进一步化简为
(3)
因此,传感器的电容可以近似等于CAC和CBC串联与CAB2并联,总电容和位移的关系式为
(4)
磁悬浮轴承系统中,为提高控制系统反馈环节的性能,一般采用差动式传感器来提高检测灵敏度和线性度[9],因此本文设计的磁悬浮轴承用电容传感器也采用差动式结构。
1.2 仿真验证
磁悬浮轴承系统中,被测转轴处于悬浮且高速旋转状态,将转轴接地几乎不可能实现,因此在通过电容传感器对浮地目标进行测量时,需要重点考虑外界干扰对测量系统稳定性的影响。对此,本文在上述结构基础上,提出采用双激励源对电容传感器进行激励,两激励信号应为同幅反相正弦信号,通过理论分析,在激励信号下,电容充放电电流从一个电极流向另一个电极,而不会因为外界环境变化导致电流流向其他地方,以此保证传感器检测的稳定性。
为研究外界接地物体对电容传感器的影响,分别在采用单激励和双激励情况下,对传感器电场进行仿真分析,仿真结果如图2所示。从仿真结果可以发现,如果采用单激励方式,外界接地物体的靠近,对传感器电场分布的影响非常明显,甚至在被测物体和接地物体之间存在电场,电场强度E≈3.7×103V/m,说明电容器的充放电电流有一部分通过外界传导到了大地,因而对传感器的检测产生影响。如果采用双激励方式,电容传感器的电场几乎不会随着外界物体的靠近而发生变化,说明采用双激励方式,可以有效避免外界对传感器的干扰,从而提高传感器的稳定性。
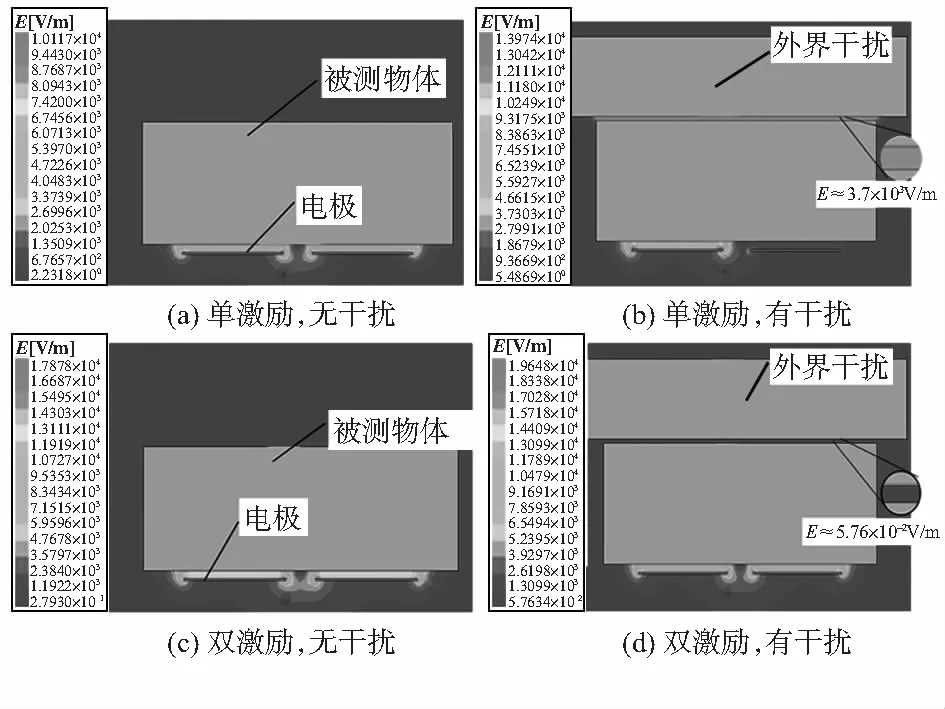
图2 电场分布仿真
如图3所示为电极面积不变的情况下,电极间距分别为0.2,0.5,1.5,2.5 mm时电容—位移的关系仿真结果。
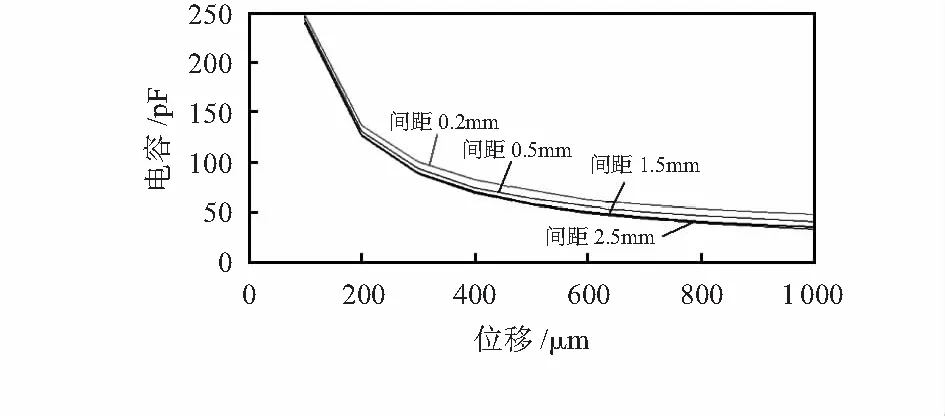
图3 电容—位移关系仿真
通过MATLAB对仿真结果进行拟合,结果如表1所示。根据拟合结果可以看出,电容由两部分组成,前面一部分是位移的反比例函数,后面一部分的常数为传感器背面的电容值,而这也符合前面的分析结果。由此可见,电极间距的改变主要影响传感器背面的电容值,电极间距越大,背面电容越小。虽然通过改变电极间距不会对传感器电容的变化率ΔC/Δd产生太大影响,但会改变传感器的总电容值,从而影响传感器电路的输出电压范围。

表1 电容—位移拟合结果
2 电路设计
2.1 激励源
由于电容传感器的容值比较小,通过LCR电桥初步测量,电容值不足10 pF,所以检测电路的工作频率一般较高。为实现高精度电容测量,提取位移值的载波必须是幅值和频率稳定的正弦信号,因此稳定性好,且幅值精度高的正弦波激励信号对于传感器的性能非常重要[10]。本文采用直接数字合成(direct digital synthesis,DDS)集成芯片AD9834生成所需的同幅反相的正弦激励信号。
AD9834为75 MHz、低功耗的DDS器件,内置2个28位频率寄存器,2个12位相位寄存器,1个16位控制寄存器,包含1个10位高阻抗、电流源数模转换器。如图4所示,通过外部控制器对芯片的内的寄存器进行配置,输出高阻抗电流源,经过负载电阻得到正弦激励信号。然后通过功率放大器对信号进行放大得到幅值频率稳定的激励信号源。

图4 信号发生器
2.2 前级电路
目前,微小电容的主要检测方法有跨阻放大检测法、充放电法以及电荷转移法[11]等。基于运算放大器的前级调制电路原理如图5所示,在正输入端输入的激励信号由于“虚短”使得传感器的电极与正输入端信号相同,从而达到了传感器两电极激励信号同幅反相。前级调制电路的输出为

图5 前级电路
(5)
式中Vo为前级调制电路的输出,C为传感器电容,Cr为参考电容,Vs为信号源。
(6)
因此,前级输出电压幅值与位移呈反比例关系,为得到线性度较高的传感器输出,可采用差动方式,即
(7)
式中V为差动输出电压,d0为平衡位置位移。对上式进行级数展开并化简后,得

(8)
可见在小范围内,输出近似与位移呈线性关系。
2.3 解调电路
对于前级调制输出的幅值与位移有关的正弦信号,需要经过后级的解调电路将位移信号解调出来,解调电路方案如图6所示。前级信号经过过零比较器后输出的方波信号控制模拟开关输入信号的选通,设输入信号为Si,则经过开关检波后输出的信号为

图6 解调电路
(9)
3 实验结果
对本文设计的传感器进行标定,由于传感器采用差动方式,在不同的差动距离的情况下,传感器的灵敏度和线性范围会有所不同,如图7(a)所示为电极尺寸5 mm×12 mm,电极间距1.5 mm,差动总位移1 100 μm情况下的标定结果。从标定结果可以看出,传感器在1 100 μm的测量范围内输出与位移呈非线性关系,在大约0~250 μm 和800~1 100 μm的范围内非线性明显,只有在250~850 μm的范围内,输出电压与位移近似呈线性关系,因此在该范围内取一段进行标定,拟合结果如图7(b)所示。可以看出,在250~600 μm测量范围内,传感器的线性度较好,灵敏度约13.7 mV/μm,可以通过调节放大倍数得到控制系统要求的20 mV/μm,传感器的线性度为1.5 %,重复性误差0.5 %。

图7 实验结果
表2所示为传感器不同差动总距离时的标定结果。

表2 测量范围与线性度
可以看出,在结构一定的情况下,测量范围越大,线性度越差。虽然输出电压与位移呈非线性关系,但由于差动结构,在整个测量范围之内存在一段近似线性的测量区间能够基本满足磁悬浮轴承控制系统的要求。调整差动总距离,可以有效提高传感器的线性测量范围。如果要使传感器的线性度更好,测量范围更大,仅通过差动结构是不够的,可以增加线性化电路,来提高系统的线性度与线性范围。
4 结束语
本文针对电容传感器在磁悬浮轴承系统中的应用问题,在传统平行板电容传感器的结构基础上进行改进,以解决磁悬浮转轴难接线的问题,通过仿真分析了结构方案的可行性,同时比较分析了单激励和双激励的传感器电场分布,结果表明:双激励源可以使传感器在测量浮地物体时更好地抵抗外界导体的干扰,从而提高传感器的测量稳定性。在此基础上,设计了传感器检测电路,包括基于前级激励信号模块、调制模块以及后级开关检波与低通滤波模块。对传感器进行静态标定,标定结果表明:在整个测量范围内存在一段线性度较好的区间基本能够满足磁悬浮轴承控制系统的要求。同时通过提高差动总距离,能够使传感器的线性范围增加。
