复杂气象条件下考虑结冰风险的无人机飞行策略
2023-01-31郭琪磊桑为民牛俊杰袁烨
郭琪磊,桑为民,牛俊杰,袁烨
1.西北工业大学 航空学院,西安 710072
2.中国民用航空飞行学院 工程技术训练中心,广汉 618307
3.中国空气动力研究与发展中心 结冰与防除冰重点实验室,绵阳 621000
4.中国商用飞机有限责任公司 上海飞机设计研究院,上海 201210
近年来无人机在物流运输、灾后救援、遥感测绘、航拍监测、电力巡检等诸多领域发挥着重要作用[1-2]。然而结冰问题日益成为威胁无人机飞行安全的重要因素。结冰问题是指航空器在积冰气象环境下飞行时,由于云层中过冷水滴撞击在其表面形成积冰而导致气动性能下降的现象[3]。根据美国联邦航空局(FAA)统计,2003─2008年间,有380余起飞机结冰相关的飞行事件[4],而在无人飞机中,由于结冰造成的事故约占总事故的25%[5]。
无人机相比有人机而言遭遇结冰后更易导致严重后果,原因在于无人机抗结冰能力差,失速响应时间更短,且可用于防除冰的能量更加有限,限制了防除冰装置效能。因此,若能根据无人机实际应用场景和结冰气象环境,快速准确地预测无人机的结冰情况,进而对无人机航迹进行优化就显得尤为重要。无人机日益深化的应用场景要求其能够在复杂的气象条件下执行飞行任务。就结冰问题而言,美国联邦航空条例(FAR)25部附录C中定义了大气结冰条件,指出航空器结冰主要受结冰气象环境影响,如液态水含量(Liquid Water Content,LWC)、平均有效水滴 直 径(droplets Median Volumetric Diameter,MVD)、相对湿度(Relative Humidity, RH)、环境温度、压力以及云层范围等[6]。
目前主要是通过考虑上述与结冰相关物理量的演化预报和诊断计算,利用结冰预报算法诊断飞机结冰情况。国际民航组织(International Civil Aviation Organization, ICAO)根据产生积冰时周围大气的温度、湿度等条件,构建了可预测结冰趋势的IC积冰算法[7]。美国国家大气研究中心(Na⁃tional Center for Atmospheric Research, NCAR)考虑到大气的环境温度、云中过冷水含量以及云滴的中位数体积直径等参数而提出了积冰严重性指数[8]。美国空军全球天气中心开发的RAOB积冰算法[9],将温度划分为不同的区间,并结合相应温度区间内不同的温露差和温度垂直递减率,进而区分积冰强度和积冰类型。美国国家大气研究中心提出的RAP积冰算法[10],该算法根据某一高度层的温度与相对湿度,将积冰定为4种类型。McDonough等[11]基于模糊逻辑和积冰情景决策树分类方法建立了潜在积冰预报算法(Forecast Ic⁃ing Potential algorithm, FIP)。Bernstein等[12]将与结冰有关的湿度、温度、云量、云水等要素与结冰可能性和结冰强度相联系,从而提出当前结冰潜势(Current Icing Potential,CIP)算法。随后在CIP算法基础上结合地面观测和探空资料,提出改进CIP算法,并计算了全球各地的结冰及过冷大水滴的气候分布[13]。王洪芳等[14]对比多种积冰算法,采用中尺度数值模式和预报产品,建立了飞机积冰预报模型。李佰平等[15]在CIP方法基础上提出了综合温度、湿度、云顶温度等要素的改进结冰潜势模糊逻辑诊断方法。然而上述各结冰预报算法均根据温度、相对湿度、云量等结冰气象参数对结冰潜势做出模糊诊断,进而预测出航空器结冰的可能性与结冰强度,但没有对航空器结冰风险做较为准确的量化评价。因此规划出满足结冰影响和其他飞行约束条件及性能指标的最佳飞行航迹,进而在复杂的气象环境中能够有效保证无人机的可靠性和行进安全就显得尤为重要。
本文提出一种复杂气象条件下考虑结冰风险的无人机航迹规划方法。首先,构建基于中尺度WRF (Weather Research and Forecasting)模式的结冰气象预测模型,通过基于最佳参数化方案组合的结冰气象模拟获得模拟时段内目标区域的温度、压力、LWC空间分布及时序变化。其次,构建基于代理模型的水滴收集质量快速预测方法。在获取FAR 25部附录C中连续最大结冰条件下40个采样点处水滴收集质量分布的基础上,基于本征正交分解(Proper Orthogonal Decomposition,POD)降阶模型和Kriging插值算法,建立温度、压力、LWC、MVD等结冰气象参数与水滴收集质量之间的代理模型,可快速预测出目标区域水滴收集质量的空间分布与时序变化。最后,针对现有结冰预报算法未能量化结冰风险的缺点,根据飞机结冰强度划分等级,以不同结冰强度下水滴收集质量阈值为结冰安全约束,利用基于粒子群优化(Particle Swarm Optimization, PSO)的结冰容限航迹规划方法进行考虑结冰风险的无人机飞行策略研究。本文所提出的复杂气象条件下考虑结冰风险的无人机飞行策略方法可根据数值预报的实时结冰气象环境,快速地定量预测出目标区域的结冰风险,并为无人机规划出安全合理的航迹路线。
1 理论方法与数值模型
1.1 WRF模式配置
本文中结冰气象预测采用WRF模式,版本为4.1.2。WRF模式是由美国国家环境预测中心(National Centers for Environmental Prediction,NCEP)和美国国家大气研究中心等联合开发的中尺度天气数值预报系统。该模式采用可压非静力动力框架和地形追随坐标系,水平方向采用Arakawa-C型网格划分计算域,具有多重网格嵌套功能和丰富的大气物理过程参数化方案。结合各国气象机构提供的全球气象数据和资料同化技术,WRF模式广泛应用于不同时间/区域尺度天气现象模拟、空气质量建模、大气海洋和理想化模拟等领域[16],用于结冰气象分析也有优异表现[17-18]。
云层中上升气流的强度是决定水凝体微观物理特性的主要因素,已有研究表明在热带地区温度低至−18 ℃的强上升气流中仍然发现有明显的过冷液滴存在[19]。此外,由于热带地区云层的云底温度较高,而暖空气比冷空气需要更大的饱和含水量,因此相较于中/高纬度地区,热带地区云层中水汽含量也会更大[20]。海南位于中国南海北部,地处热带北缘,四面环海,海陆效应明显,强对流活动强烈且频繁[21]。因此海南地区高空云层中的航空器飞行安全也容易受到结冰问题威胁。
本文中结冰气象预测区域位于中国海南乐东地区(18.69N, 109.16E),模拟时段为UTC 2021-05-01T00:00至UTC 2021-07-31T00:00。WRF模式输入资料采用NCEP发布的全球预报系统(Global Forecast System, GFS)生成的实时预报数据,其水平精度为0.25°×0.25°,时间分辨率为6 h。出于节省计算资源的考虑,模式采用2层嵌套方式,并遵循双向嵌套策略,即粗糙的外部模型域(D01)为精细的内部嵌套域(D02)提供边界条件,而嵌套域在计算后将信息反馈到模型域。此外,嵌套区域水平网格分辨率分别为3 km(网格数为200×200)、1 km(网格数为190×190),垂直方向均匀划分为34层。
基于前期大量数值试验并参考相关文献,所确定WRF模式参数化方案如下所述:边界层参数化采用Yonsei University(YSU)方案[22],积云参数化采用Kain-Fritsch(K-F)方案[23],长波/短波辐射分别采用RRTM (Rapid Radiative Transfer Model)方案[24]与Dudhia方案[25],近地面层采用MM5相似方案[26],陆面过程采用Noah陆面模型[27]。为优化WRF模式参数化方案,采用4种微物理过程进行敏感性分析工作,分别为WSM6方案[28]、Purdue-Lin方案[29]、Thompson方案[30]、Morrison方案[31],具体4种微物理过程方案特征如表1所述。
表1 4种微物理过程方案特征Table 1 Characteristics of four microphysics schemes
基于WRF的结冰气象预测模型的评价指标分别采用绝对平均误差(Mean Absolute Error,MAE)、相对平均误差(Root Mean Absolute Er⁃ror, RMAE)以及相关系数(Pearson correlation coefficient,r),具体定义为
式 中:ymeas和ypred分 别 为 观 测 值 与 预 测 值;yˉmeas和yˉpred分别为观测值与预测值的均值;Np为样本数量。
1.2 基于POD和Kriging的代理模型
本征正交分解(Proper Orthogonal Decomposition,POD)方法的核心是使用特殊正交基函数的叠加来实现未知参数的近似[32]。基本理论为假设某一空间Ω中存在物理场y=y(x,t),可表示为一系列特征基函数与相关时间系数的线性组合:

式中:x和t为参数变量;αk(tk)为经验系数;Φk(x)为特征基函数。借助Sirovich[33-35]引入的方法,取N个样本集合为一组快照。找到这组快照所张成空间Ψ中的一组规范正交基使得集合中的元素在这组基上投影最大,即
其中:( · , · )表示内积运算。

将式(6)代入式(5)可以得到一个新的特征值问题:

式中:A为N×N的协方差矩阵,其中各元素为Ai,j=(U(i),U(j));λ(1),λ(2),…,λ(N)为矩阵A从大到

矩阵A特征值的大小可以表征其对应正交基在整个样本空间中所占能量的比重。因此进行物理场重构时便可以仅保留部分正交基函数就能够表征原物理场的主要特征。假设选用M个正交基函数,且有M≤N。在进行矩阵分解得到最佳正交基后,对选取的正交基与样本进行内积即可得到对应的系数向量:

因此,重构的物理场可以使用正交基的线性叠加表示为

给定n个输入参数样本点及其相对应的系统响应值其中X(i)为m维向量。Kriging模型假设目标函数值与设计变量之间的真实关系可以表达为[36]

式中:F(β,X)为全局近似模型,为确定性部分;H(X)为一维随机过程,其均值为0,方差为σ2,协方差表示为

其中:Z(X(i),X(j))为输入参数变量X(i)和X(j)的相关函数,其与两点间空间位置密切相关,并随着空间距离增大而减小。
式中:θq为第q个输入参数分量xq的距离权值。
构建Kriging代理模型的关键在于寻找最佳的θ向量,通过最大似然法将该问题转化为如下的带约束优化问题:
式中:Z(θ)为相关函数矩阵,其第i行第j列元素为Z(X(i),X(j));σ2为方差估计值,其表达式为
其中:F为所有元素均为1的向量。
在求得最优θ向量后,对任意一个新的输入参量向量X(0),对应的Kriging模型的估计值为

式中:z为n维相关向量,其第i个元素为Z(X(0),X(i))。
1.3 基于PSO的结冰容限航迹规划方法
本文中对无人机飞行策略的考察主要从航迹规划角度出发。无人机航迹规划是指在综合考虑无人机自身物理约束及飞行区域中威胁和障碍物分布等诸多约束条件下,为无人机在给定的飞行区域中规划出一条连接飞行起点和目标终点的满足所有约束条件的最优或次优的可飞路径[37],其中成功求解航迹规划问题的关键在于航迹规划算法研究。
粒子群优化(Particle Swarm Optimization,PSO)算法是通过模拟鸟群觅食过程中迁徙和群聚行为的一种全局随机优化技术[38],由于其基于种群的特性、易于实现和快速收敛等优势,因此被广泛应用于求解航迹规划问题。PSO算法的基本原理为:假设D维搜索空间内,K个粒子均被赋予位置和速度向量,即pi=[pi1,pi2,…,piD]Τ和Vi=[vi1,vi2,…,viD]Τ。寻优过程中每个粒子都通过跟踪个体极值Pi和全局极值Pg来更新位置。在第k次迭代过程中,可由已知的和可对粒子状态进行更新,即

式中:w为粒子的惯性权重系数;c1和c2为正实数,分别表示粒子的认知和社会加速度系数;r1和r2为分布于[0,1]区间的随机数。
在基于PSO的结冰容限航迹规划问题中,采用文献[39]中提出的方法建立规划空间模型。如图1所示,构建全局笛卡儿坐标系Oxy表示无人机航迹的规划空间,其中点st和ta分别表示所规划无人机航迹的起始位置和终点位置,阴影区域表示规划空间中的禁飞区、障碍物、威胁源等。在所构建的坐标系中,起始位置st和终点位置ta沿x方向可以等分为ns+1等分,其中ns为规划航迹导航节点数,为决策者预定义的常量。
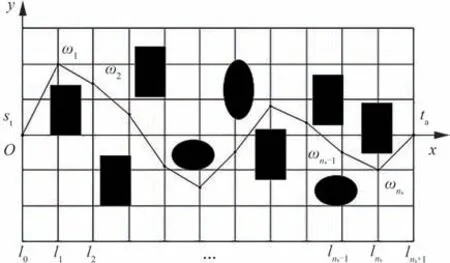
图1 所构建的二维航迹规划空间Fig. 1 Constructed 2D path planning workspace
本文中,所规划航迹需满足以下条件:① 所规划航迹航程最短;② 所规划航迹需满足指定的结冰风险。因此单机航迹规划问题的数学模型表示为
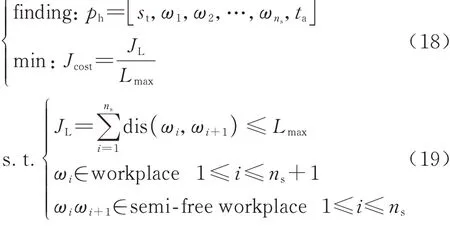
式中:ωi为任意待选航迹ph中的导航节点;JL为任意待选航迹的航程长度;Lmax为无人机的最大飞行航程;dis(ωi,ωi+1)为待选航迹ph中导航节点ωi与ωi+1之间的欧式距离;workplace为整个规划空间;semi-free workplace为规划空间中满足结冰风险的半自由规划空间。
鉴于本文的单机航迹规划问题为约束优化,引入任意待选航迹phm中粒子总的违反约束度TDm,在粒子初始化阶段,为增加解的多样性,TDm只需满足容限要求即可,而在航迹迭代优化阶段,则要求待选航迹phm满足最小航迹要求和结冰安全约束要求,即TDm=0[40]。总的违反约束度TDm的计算式为
式中:Ds,m为该粒子违反航迹安全性能约束的程度;Df,m为该粒子违反无人机最大飞行航程限制的程度;Vm,j为待选航迹phm中第j个节点满足结冰安全约束情况;Lm为待选航迹phm的航程长度。
基于PSO的结冰容限航迹规划算法流程如算法1所示。
2 数值模型验证
2.1 基于WRF模式的结冰气象预测
目标区域内结冰气象预测分别采用表1中所示4种微物理过程所形成的参数化方案组合进行模拟,并通过误差分析确定最佳参数化方案。4种参数化方案所获得的压力和温度预测值与东方气象观测台站处的观测值对比如图2与图3所示。图中黑色线为东方气象台站观测值,蓝色线为Purdue-Lin方案预测值,洋红色线为WSM6方案预测值,红色线为Thompson方案预测值,绿色线为Morrison方案预测值,1 hPa=100 Pa。可知,尽管在个别时刻点处,4种微物理过程方案的预测值在数值精度上与实际观测值存在偏差,但总体上4种微物理过程方案均可以十分准确地预测东方气象观测台站位置处压力和温度的时序变化趋势。
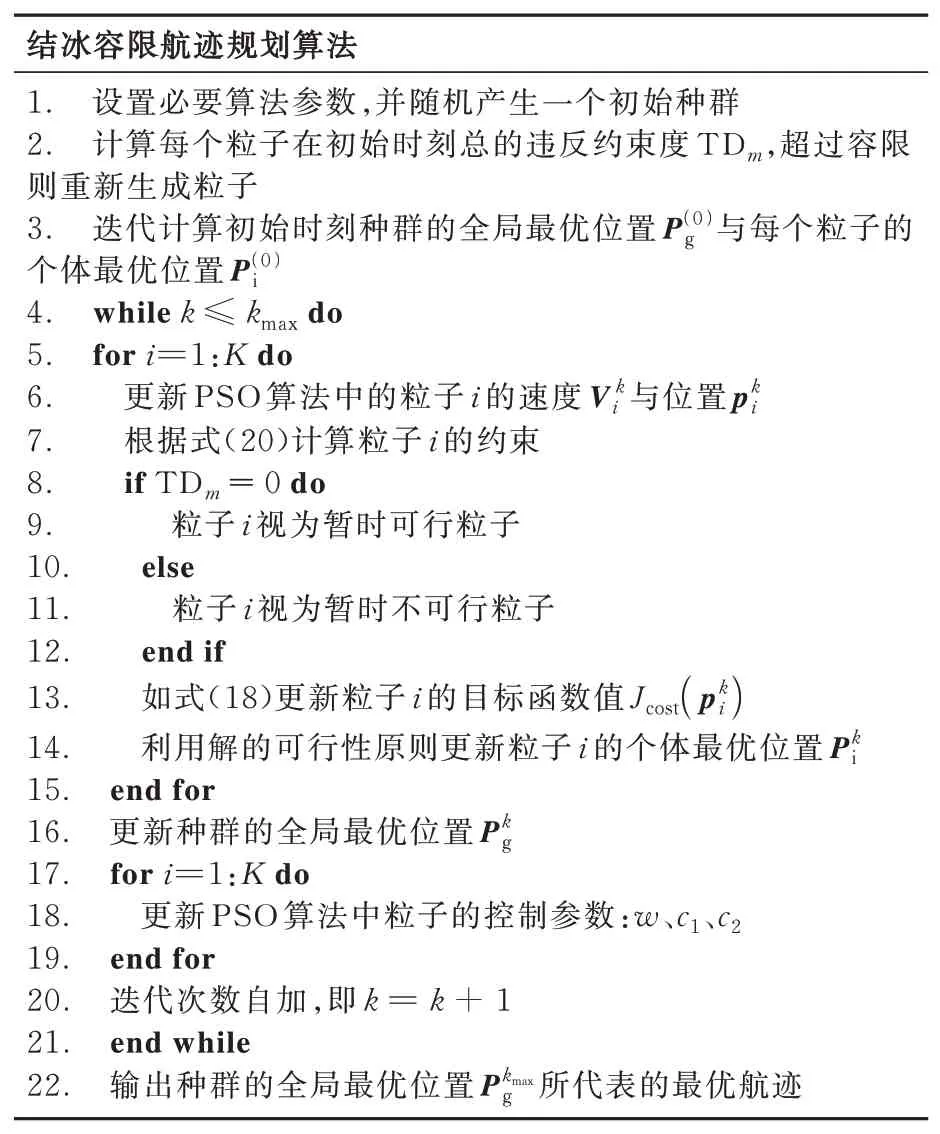
算法1 基于PSO的结冰容限航迹规划Algorithm 1 Ice tolerance route planning based on PSO
表2为不同微物理过程方案预测下误差分析。由表中所述误差可知,各参数化方案组合在压力和温度预测中均有出众的表现,MAE仅约为0.80 hPa和0.98 K,RMAE也均小于0.08%和0.35%,说明各方案组合在压力和温度预测中具有足够的数值精度。而各方案在压力和温度预测中的相关系数r也分别高达0.89和0.91,体现出了预测值与实际观测数据极强的相关性。
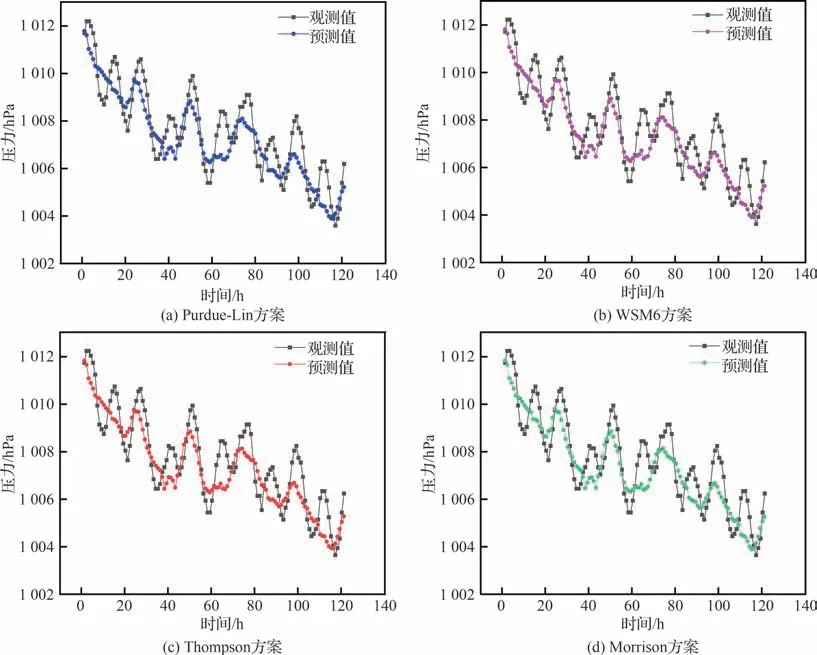
图2 不同微物理过程方案下压力对比Fig. 2 Comparison of pressure in different microphysics schemes
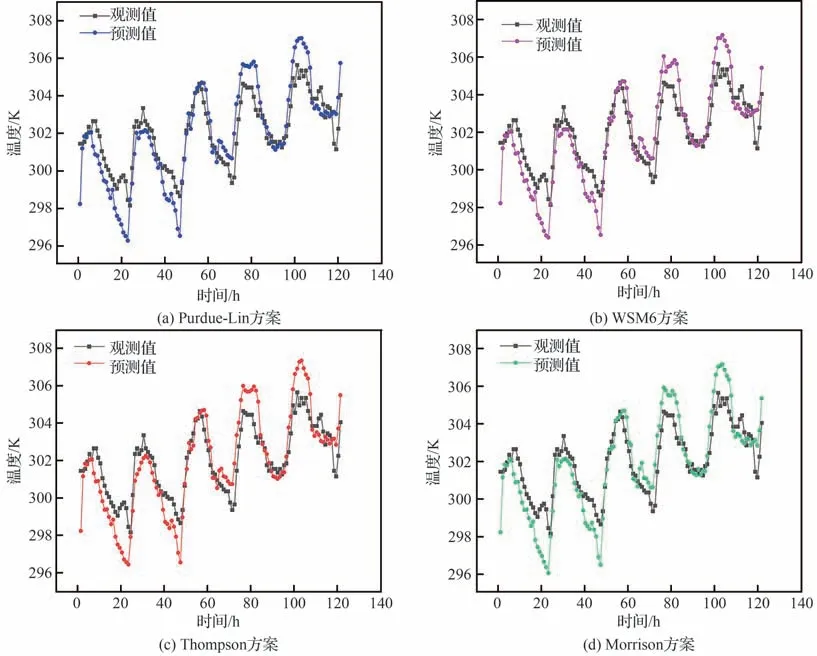
图3 不同微物理过程方案下温度对比Fig. 3 Comparison of temperature in different microphysics schemes
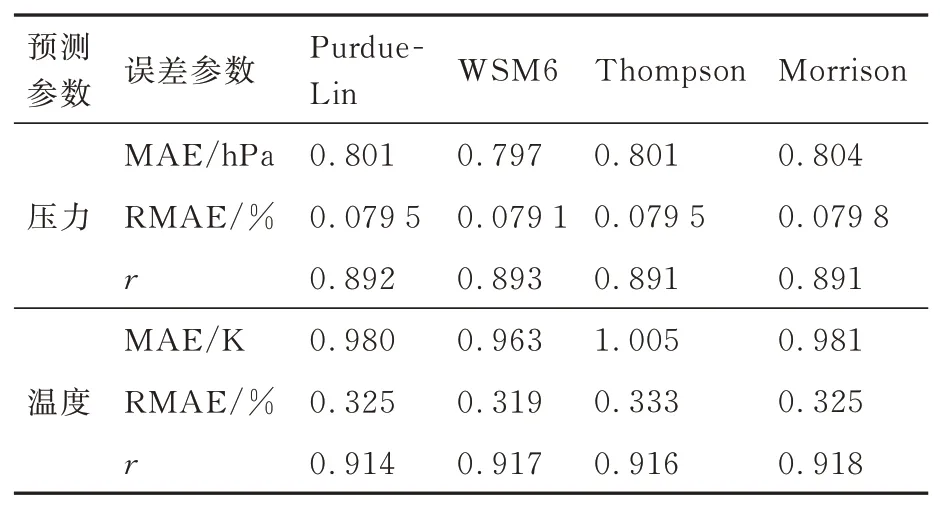
表2 4种微物理过程方案预测下误差分析Table 2 Error analysis of four microphysics schemes prediction
上述4种微物理过程方案组合在结冰气象预测中,压力和温度的预测值与实际观测值在数值精度和数据相关性方面均有出色的表现。考虑相较于其他3种方案,Morrison方案不仅可以较好预测云水、云冰、雨、雪、霰等5种不同水成物的质量浓度,还可以给出云冰、雪、雨和霰等粒子的分布图谱,这为后续研究中准确预测云中过冷水滴MVD提供了便利。因此,本研究选定Morri⁃son方案为最佳微物理过程方案,并用于目标区域的结冰气象预测。
图4为LWC时序变化与文献[41]中结果对比。图中黑色圆点为实际观测值,蓝色线为本文中WRF模拟结果,红色线为文献[41]中模拟结果。可知本文中数值模拟结果虽然在数值精度上与实际观测值存在偏差,但能够较好反映出实际观测值的时序变化。此外本文和文献[41]中LWC的MAE分别0.084 g/m3和0.099 g/m3,本文预测LWC的表现优于文献[41]中结果。因此本文所构建WRF模式参数化方案组合能够准确预测出云层中的液态水含量。
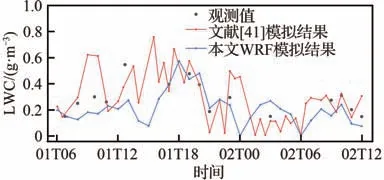
图4 时序变化下LWC对比Fig. 4 Comparison of LWC variation with time
2.2 基于代理模型的水滴收集质量快速预测
根据1.2节中所述的代理模型,构建水滴收集质量快速预测方法,相应的壁面水滴收集质量计算式为

式中:LWC为云层中液态水含量;V∞为来流速度;β为局部水收集系数,且有β=A0Ain,其中A0与Ain分别为自由流场中由4条水滴轨迹所围成的面积及在翼型表面所围成的曲面面积。
对FAR 25部附录C中连续最大结冰条件进行优化拉丁超立方采样(Optimal Latin Hypercube Sampling, OLHS),获得40个工况采样点,采样点分布如图5所示。以NACA 0012翼型为模型,其弦长C为0.533 4 m,攻角AOA为4°,来流速度V∞为50~100 m/s。分别对40个采样点处水滴撞击特性进行数值模拟,获得不同工况下的水滴收集质量分布,其中部分采样点工况如表3所示,表中T为温度、H为高度。
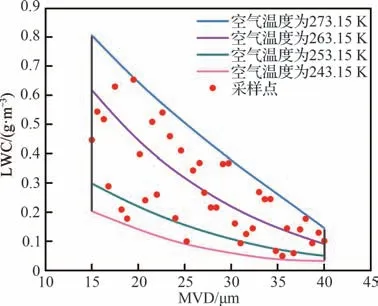
图5 连续最大结冰条件下采样点分布示意图Fig. 5 Schematic diagram of sampling point distribution under continuous maximum icing conditions
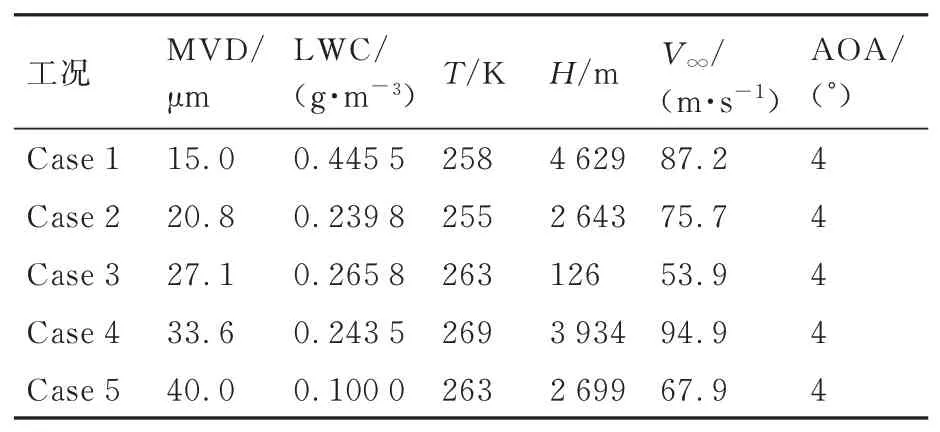
表3 部分采样点工况Table 3 Working conditions of partial sampling points
图6为表3中采样点工况下水滴收集质量在翼面处分布对比,其中Y为与弦线垂直的方向,翼型前缘点为坐标原点。可知在翼型前缘处水滴收集质量最大:受来流角度影响,水滴收集质量的最大值出现在翼型前缘下沿。而在前缘点之后沿着翼型表面水滴收集质量逐渐减小,相应地下翼面处水滴收集质量变化相较于上翼面更为缓慢,水滴撞击极限也相对更大。水滴收集质量峰值与撞击极限分布受LWC、MVD、温度T、高度H、来流速度等因素综合影响,其中水滴收集质量极值分布受LWC和来流速度的影响较大,如Case 1与Case 4。而由于直径较大、速度较大的液滴具有较大的惯性,在撞击机翼表面时液滴轨迹不易发生改变。因此水滴撞击极限范围通常随MVD和来流速度增大而增加,如Case 4与Case 5。
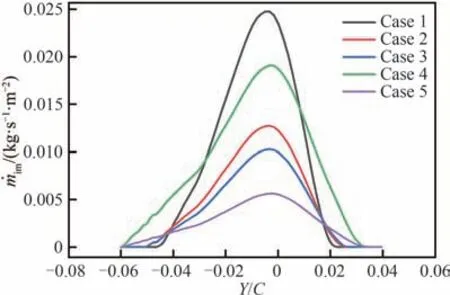
图6 不同工况下水滴收集质量沿翼面分布对比Fig. 6 Comparison of water droplet collection distribution along airfoil surface under different conditions
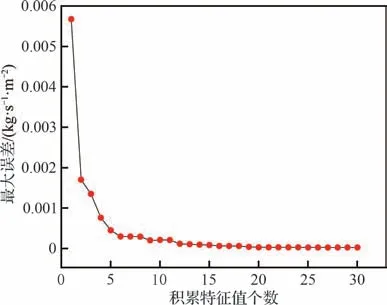
图7 水滴收集质量最大误差随积累特征值变化Fig. 7 Variation of the maximum error of water droplet collection with cumulative eigenvalues
图7给出了壁面处水滴收集质量最大误差随积累特征值的变化。图中可以看出随着积累特征值的增加,最大误差迅速减小,当积累特征值达到20时,水滴收集量最大误差减小至接近于0。说明采用POD方法可利用少量特征基函数对原物理场进行重构。因此在本文中,使用前20个特征基函数进行降阶,即可满足精度要求。而非采样点(即预测点)处的特征系数,可通过对前20个系数分别进行Kriging多维插值获得。在建立代理模型后,选用9组工况进行验证,分别考虑到影响结冰的温度、高度、MVD、LWC和速度等5个参数,具体验证算例工况如表4所示。图8示出了快速预测结果与数值模拟结果的水滴收集质量对比。可以看出无论是水滴收集质量的峰值还是分布范围,快速预测结果均与数值模拟结果符合良好,说明所构建的代理模型可以快速且准确地预测出翼型表面水滴收集质量。
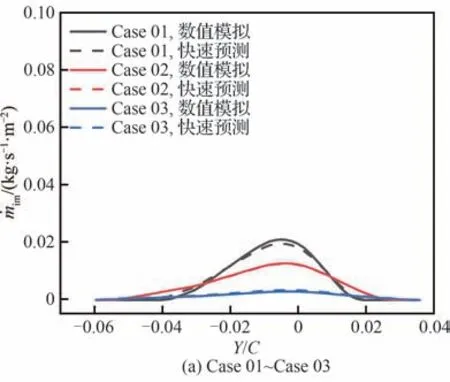
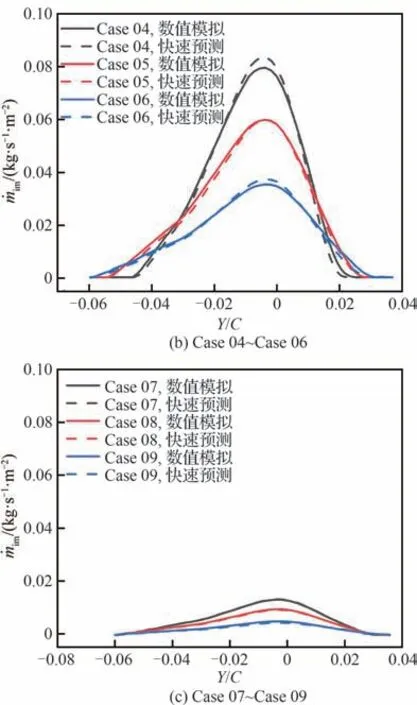
图8 数值模拟与快速预测水滴收集质量对比Fig. 8 Comparison of water droplet collection between fast-prediction and simulation
3 结果与讨论
本文采用WRF模式对海南乐东地区进行了结冰气象模拟,模拟时段为UTC 2021-05-01 T00:00至UTC 2021-07-31T00:00,每次模拟的前12 h作为模式的起转时间。参数化方案与模式输入资料的选择详见本文1.1节。
无人机结冰主要受气象因素(如大气温度、飞行高度、LWC、MVD)以及飞行状态(如速度)等因素影响。基于WRF模式的结冰气象预测可获得无人机在某一飞行环境中的大气温度、气压与LWC等参数。需要说明的是在本文中,当大气温度<273.15 K时,则认为液态水为过冷态,过冷水温度与大气温度保持一致。根据图5所示连续最大结冰条件与预测所得的LWC,进行插值则可以获得目标区域内MVD。图9~图11分别为UTC 2021-05-26T21:00、UTC 2021-06-05T01:00以及UTC 2021-07-11T08:00在高度层eta=25处目标区域内压力、温度与LWC分布云图。
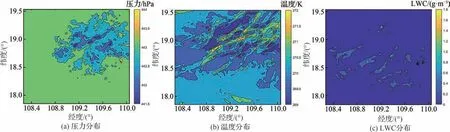
图9 UTC 2021-05-26T21:00(eta=25)气象参数分布Fig. 9 Meteorological parameter distribution at UTC 2021-05-26T21:00 (eta=25)
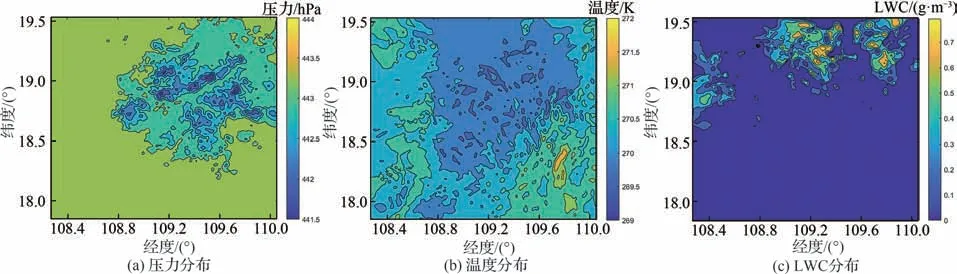
图10 UTC 2021-06-05T01:00(eta=25)气象参数分布Fig. 10 Meteorological parameter distribution at UTC 2021-06-05T01:00 (eta=25)
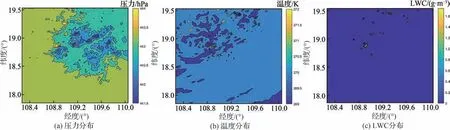
图11 UTC 2021-07-11T08:00(eta=25)气象参数分布Fig. 11 Meteorological parameter distribution at UTC 2021-07-11T08:00 (eta=25)
以上述3组结冰气象条件为基础,假定无人机飞行速度为50 m/s,利用所构建的基于POD与Kriging的水滴收集质量代理模型,分别对目标区域内水滴收集质量进行快速预测,获得水滴收集质量空间分布如图12所示。
采用结冰强度作为考虑无人机航迹规划问题中的结冰安全约束要求。结冰强度是指单位时间内航空器表面所形成的冰层厚度,亦称之为结冰速率。美国联邦航空条例与航空信息手册(AIM)将结冰强度划分为4个等级,用以说明结冰情况的严重性。在本文研究中,将结冰速率乘以冰的密度即可获得水滴收集质量,取冰的密度为917 kg/m³,且认为冰的密度始终为常数。飞机结冰强度等级划分及水滴收集质量等效转换结果如表5所示。
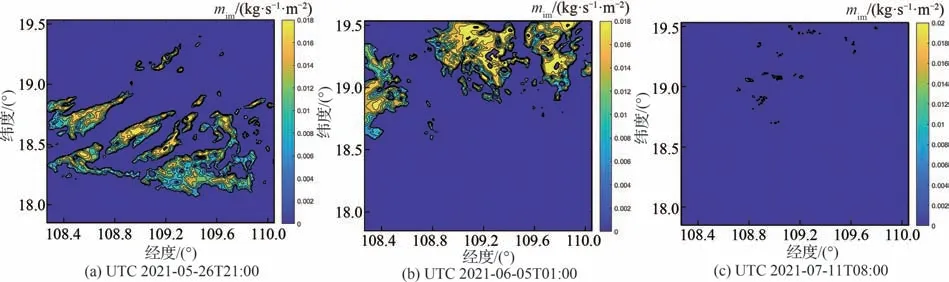
图12 水滴收集质量空间分布Fig. 12 Spatial distribution of water droplet collection
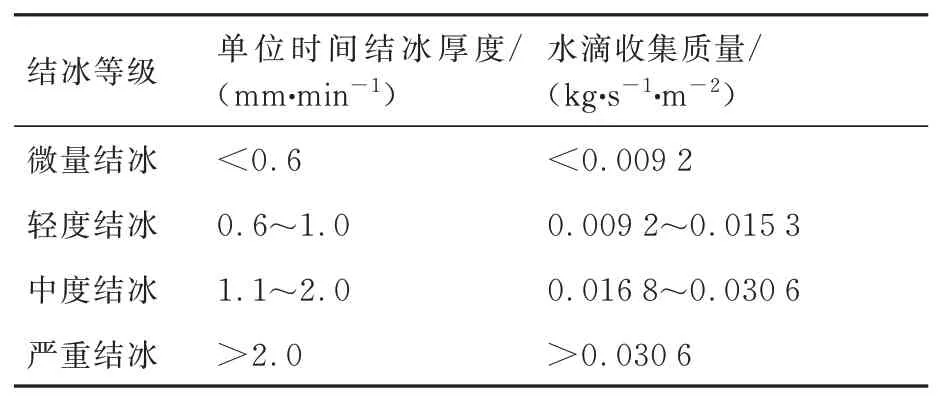
表5 飞机结冰强度等级划分Table 5 Aircraft icing intensity classification
以图12中目标区域内3组水滴收集质量分布作为无人机航迹规划空间。由于3组航迹规划空间内最大水滴收集质量均未超过0.02 kg/(s∙m2),意味着最大结冰强度等级为中度结冰,因此分别选取表5中微量结冰与轻度结冰等级上极限,即水 滴 收 集 质 量 为0.009 2 kg/(s∙m2)与0.015 3 kg/(s∙m2)作为无人机航迹规划中结冰安全约束。当所规划航迹点水滴收集质量小于上述上极限时,认为该航迹点满足结冰安全约束;否则违反结冰安全约束,该航迹点应该规避。
利用所构建的基于PSO的结冰容限航迹规划方法分别规划出上述3种情况下满足最小航迹要求和结冰安全约束要求的离散航迹点,最终得到无人机可飞路径。图13~图15分别为3种情况下所规划航迹示意图,图中洋红色线条表示满足轻度结冰强度的航迹路线,绿色线条表示满足微量结冰强度的航迹路线,红色方块点与绿色五角星点分别代表所规划航迹路线的起始点与终止点。从图中可以看出,在规划满足微量结冰强度的航迹路线时,由于结冰安全约束要求较强,所规划航迹可规避开结冰可能性高的区域,然而代价是航迹距离相应增大。而在规划满足轻度结冰强度的航迹路线时,由于结冰容限更高,因此可规划出满足给定结冰安全约束要求的最短航迹。3种规划航迹的航程如表6所示。
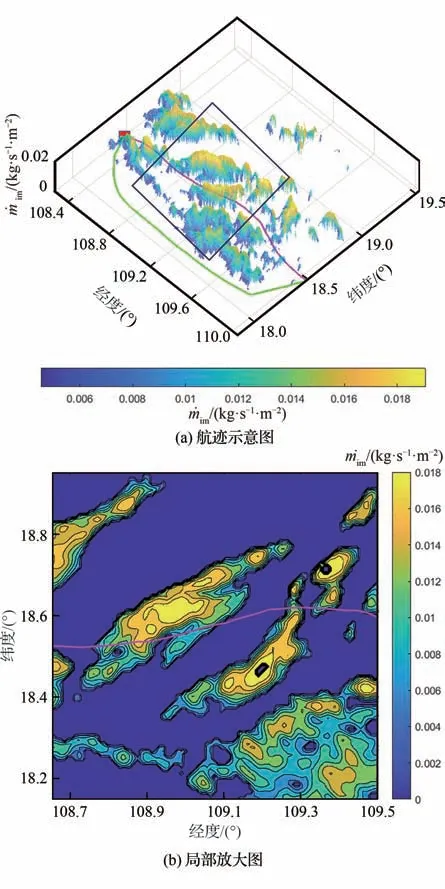
图13 UTC 2021-05-26T21:00(eta=25)航迹规划Fig. 13 Route planning at UTC 2021-05-26T21:00(eta=25)
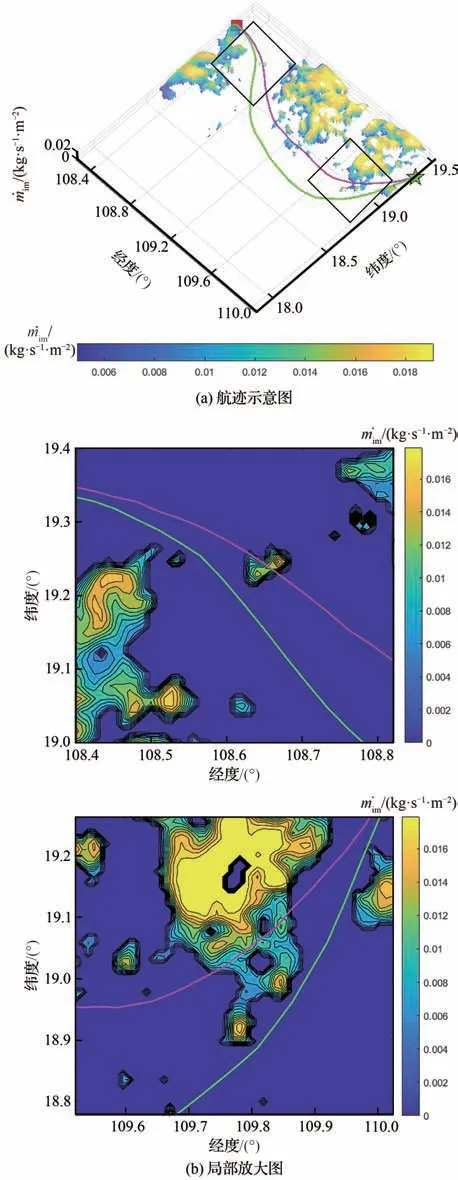
图14 UTC 2021-06-05T01:00(eta=25)航迹规划Fig. 14 Route planning at UTC 2021-06-05T01:00(eta=25)
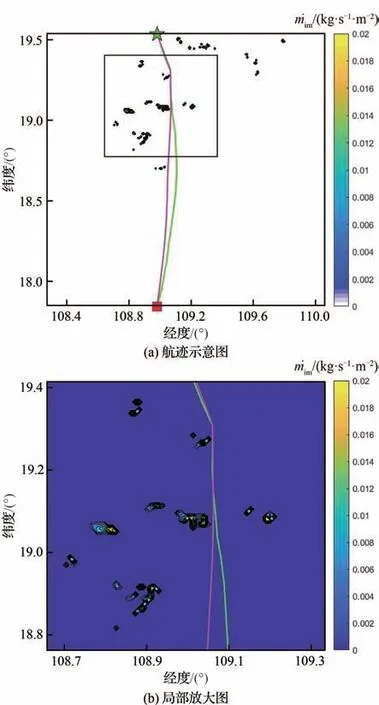
图15 UTC 2021-07-11T08:00(eta=25)航迹规划Fig. 15 Route planning at UTC 2021-07-11T08:00(eta=25)
由式(23)可知,水滴收集质量与气象条件、飞行条件及几何外形结构有关。图16为UTC 2021-06-05T01:00时刻不同飞行速度下的水滴收集质量分布,与图12(b)相比较,水滴收集质量分布几乎保持一致;然而随着飞行速度增大至75 m/s和100 m/s时,空间分布中最大水滴收集质量可达到0.035 8 kg/(s∙m2)和0.052 7 kg/(s∙m2),根据表5所示结冰强度等级划分,此时已出现严重结冰条件。
表6 3种规划航迹的航程Table 6 Voyage of three route trajectories
以图16(a)中飞行速度为75 m/s目标区域内水滴收集质量分布作为无人机航迹规划空间。由于此时航迹规划空间内最大可能结冰强度等级为严重结冰,因此分别选取表5中微量结冰、轻度结冰与中度结冰等级上极限,即水滴收集质量 为0.009 2、0.015 3、0.030 6 kg/(s∙m2)作 为无人机航迹规划中结冰安全约束。利用基于PSO的结冰容限航迹规划方法,规划得到不同结冰强度等级下的无人机可飞路径,如图17所示。此时,满足微量、轻度与中度结冰等级的规划路径航程分别为253.1、226.6、204.9 km,可知由于满足中度结冰等级时的结冰容限更高,因此规划出满足给定结冰安全约束要求的航迹航程最短。
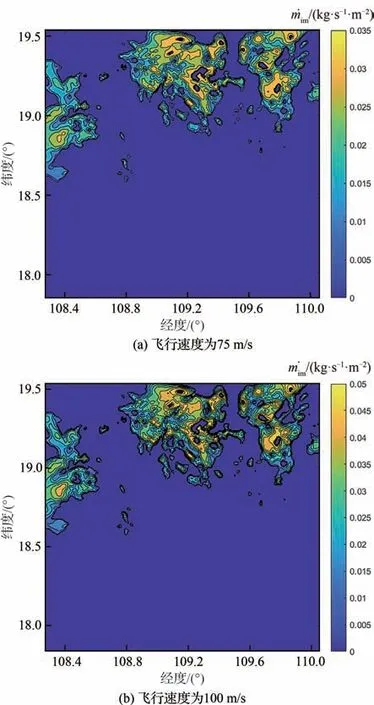
图16 不同飞行速度下水滴收集质量分布Fig. 16 Distribution of water droplet collection at dif⁃ferent flight speeds
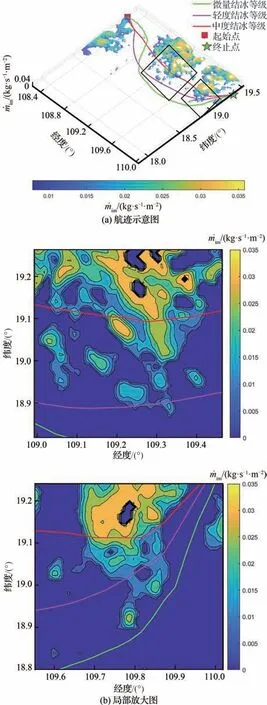
图17 飞行速度为75 m/s时航迹规划Fig. 17 Route planning at flight speed of 75 m/s
4 结 论
为解决无人机在复杂气象条件下易受结冰影响,从而威胁其飞行安全的问题,提出了一种考虑结冰风险的无人机航迹规划方法。基于中尺度天气预报WRF模式对海南乐东地区结冰气象环境进行预测,通过参数化方案敏感性分析确定了最佳参数化方案组合,进而获得该时段内目标区域的温度、压力、LWC空间分布及时序变化。与此同时,利用OLHS方法对FAR 25部附录C中连续最大结冰条件进行采样,并对40个采样点进行水滴撞击特性计算,获得各采样点处水滴收集质量分布;基于POD降阶模型和Kriging插值方法,构建温度、压力、LWC、MVD等气象参数与水滴收集质量间的代理模型。基于结冰气象预测参数与代理模型,获得海南乐东地区水滴收集质量的空间分布与时序变化。最后,分别以不同结冰强度下水滴收集质量阈值作为结冰安全约束,利用基于PSO的结冰容限航迹规划方法对无人机进行考虑结冰风险的飞行策略研究。研究结果表明:
1) 利用WRF模式可获得目标区域内温度、压力、LWC等结冰气象参数,且经对比证实其预测值与实际观测值匹配良好。基于WRF的结冰气象预测可为航空器结冰影响分析提供实时、准确的结冰参数。
2) 基于POD降阶模型和Kriging插值方法,所构建的气象参数与水滴收集质量间的代理模型可较好地体现温度、压力、LWC、MVD等气象参数对于水滴收集质量的影响。虽然获取采样点处样本数据会耗费一定时间,但建立好代理模型后,可以快速准确地预测目标区域内水滴收集质量的空间分布与时序变化。
3) 基于PSO的结冰容限航迹规划方法可在不同结冰安全约束条件下,规划出无人机的最优路径。此外提出结冰容限概念,在粒子初始化阶段,可增大搜索空间并增加解的多样性,使得算法可求解出更为精确的无人机航迹。
