基于VMD-GA-BP 和误差校正的水电机组振动趋势预测
2023-01-30袁成建邓玉敏张雪桂严耀亮李超顺
袁成建,邓玉敏,张雪桂,马 历,严耀亮,李超顺
(1.华中科技大学土木与水利工程学院,湖北 武汉 430074;2.中国长江三峡集团有限公司,湖北 武汉 430014)
0 引言
伴随着我国水电装机规模的不断增大,水电在我国整个电力系统中的占比逐渐增加[1],水电机组的安全稳定运行显得更加重要。而水电机组的大部分问题均可以由机组的振动信号来反映[2],因此水电机组的振动趋势预测研究具有十分重大的理论和工程意义。
水电机组振动信号由于其复杂性和非平稳性特点如果采取直接预测的方式往往难以取得良好的效果,为此需要对振动信号进行事先处理。通常采用的方法包括:傅里叶变换(Fouri⁃er Transform)、小波变换(Wavelet Transform,WT)及经验模态分解(Empirical Mode Decomposition,EMD)等时频分析方法[3,4]。在工程实际应用中傅里叶变换提取信号频谱时,需要利用信号的全部时域信息,这是一种整体变换,缺少时域定位功能;小波变换需要选择合适的母小波,泛用性较差;而经验模态分解存在模态混叠现象。变分模式分解(Variational mode decomposi⁃tion,VMD)[5]作为一种新的信号处理方法,可以有效避免以上情况,根据实际情况实现复杂信号的分解。
机组的振动趋势预测首先需要根据机组的历史运行振动数据建立趋势预测模型,然后根据实时的运行数据来预测机组未来的振动趋势,以达到提前预知机组运行状态信息的目的。为此国内外众多学者都进行了许多相关的研究工作。王青华等人基于自回归滑动平均模型建立了抽水蓄能机组的振动趋势预测模型,实现了对机组上导轴承及上机架的振动趋势预测[6];贾春雷等设计了BP 神经网络,对机组振动值实现了较好预测[7];詹娜等人通过对比BP 神经网络和支持向量机预测效果,指出了支持向量机更加适用于机组振动趋势预测[8]。但上述研究并未考虑振动信号的非平稳性和复杂性,因此预测效果不佳。付文龙等人基于振动信号建立了EEMD-SVR 的状态趋势预测模型,得到了较好的预测结果[9];王洪波等人利用EMD和最小二乘支持向量机实现了对非平稳振动信号的趋势预测[10]。陆丹等人结合EEMD 和神经网络构建了基于EEMDGA-BP 的水电机组状态趋势预测模型,实现了对水电机组振动状态趋势的有效预测[11]。但由于原始信号分解本身存在的一些问题和局限性,上述研究所得预测结果精度有待进一步提升。
为有效判断水电机组运行振动状态变化趋势,本文选择采用VMD 和GA-BP 构建了水电机组的振动趋势组合预测模型。将机组原始的振动信号利用VMD 分解为若干个IMF 分量信号序列,对每一个IMF 分量建立BP 神经网络模型;使用遗传算法(GA)来优化网络各层节点之间的权值和阈值,以实现对每个IMF 分量信号的准确预测;最后将各BP 神经网络的IMF 分量信号预测结果进行叠加,得到振动信号的初步预测结果,并在此基础上,考虑原始振动信号与此IMF 分量信号叠加结果之间的误差值,建立了VMD-GA-BP-E 的振动趋势预测模型对预测误差进行了校正。经过实验验证,本文所提出的振动趋势预测模型相比其他模型有着更高的精确度。
1 理论基础
1.1 VMD算法
为了解决传统经典递归式算法如LMD,EMD等在信号分解时存在的模态混叠与端点效应等问题,Konstantin Dragomirets⁃kiy 等人提出一种完全非递归的信号分解方法:变分模态分解(Variational Mode Decomposition,VMD)。其通过求解频域变分优化问题,可以将复杂程度高、非线性强的非平稳信号分解成多个频率尺度不同且相对平稳的分量信号。其具体的分解过程如下[12-14]:
(2)n=n+1,进入循环。
(3)依据uk和wk的更新公式进更新,直至分解个数达到K时停止内循环。
uk和wk的更新公式如下:
(4)依据λ更新公式更新λ。λ更新公式如下:

(5)给定精度ε,若满足停止条件:

则停止循环,进入步骤(2)继续下一个循环;
其中uk为分解后得到具有一定规律性的单分量平稳信号;wk为每一个单分量信号的中心频率;λ 为拉格朗日乘数;n为迭代次数。
水电机组运行工况复杂干扰因素较多,机组振动信号复杂,且非线性性强。直接进行趋势预测会产生较大的误差,难以满足工程应用需要。应用VMD 算法将振动信号分解为多个分量再进行预测可以很好的避免由于信号的非平稳性导致的预测误差较大的问题,提高趋势预测的精度。
1.2 GA-BP神经网络
BP 神经网络是当前被使用最为普遍的人工神经网络。其一般为三层式结构:输入层、隐藏层和输出层。前向传播过程中,输入信号经过每个神经元的激励之后输出成为下一层的输入,从而一层接一层的传递到最后输出层,由输出层输出结果[15]。然后计算所得结果与给定目标值之间的误差再进行反向传播。并且利用梯度下降等方法来更新网络各层节点之间的权重,然后不断重复此过程以满足目标误差或最大迭代次数。然而,作为一种确定性算法,梯度下降法所得收敛值并非一定为全局最优,与初始参数有关,因此模型的稳定性和确定性受初始参数作用较大。遗传算法是一种模拟生物进化过程的人工智能优化算法[16],可以实现问题的最优解。因此利用GA算法可以有效搜寻BP网络全局最优参数。
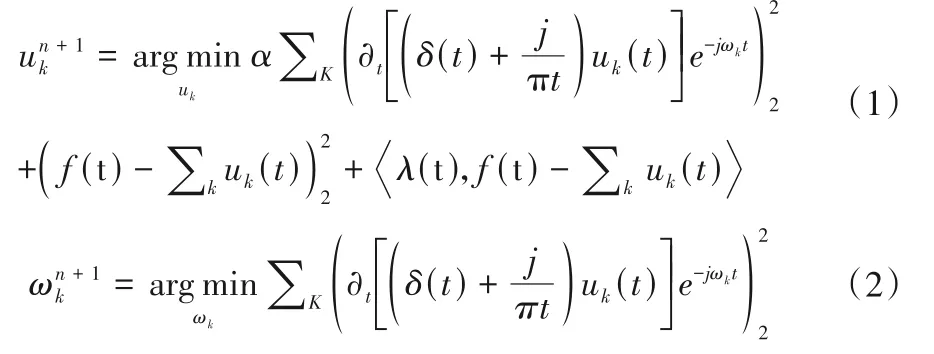
GA-BP算法流程如图1所示。
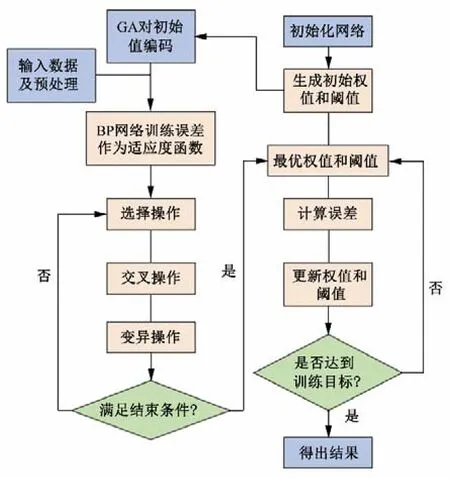
图1 GA-BP算法流程图Fig.1 GA-BP algorithm flow chart
2 基于VMD 和GA-BP 及误差校正振动趋势预测模型
由于机组振动信号本身存在的复杂性和非平稳性,如果直接采用预测模型对振动进行预测,所得结果往往不能满足实际的精度要求。因此,本文利用VMD方法的对非平稳信号的强大处理能力并结合GA-BP 神经网络提出基于VMD-GA-BP 的水电机组振动趋势预测模型。模型流程示意图如图2所示。该模型主要可以分为VMD 信号分解、GA-BP 预测以及最后的结果叠加3 个部分。第一步使用VMD 方法把最初的振动信号分解成若干不同的IMF 分量;第二步就各IMF 分量建立BP 神经网络,并利用GA 对网络进行优化[17],经训练后得到每一个IMF 分量的预测结果,最后将所得各IMF 分量预测结果相加即可获得原始振动信号的预测结果。
图2 VMD-GA-BP模型框图Fig.2 Block diagram of VMD-GA-BP model
另外考虑到经VMD 分解后的各分量信号叠加之后与原始振动信号之间存在一定的误差会对预测结果产生较大的影响,因此本文在VMD-GA-BP 模型的基础上,提出一种结合误差校正的组合预测模型,命名为VMD-GA-BP-E。模型流程图如图3 所示。设原始摆度时间序列为x(i),经VMD 分解后的各IMF分量叠加后的信号序列为x0(i),则误差信号序列为xe(i)=x(i) -x0(i),将所得误差信号序列同样使用上述VMD-GA-BP预测模型预测得到误差预测序列e(i)。则最终的预测结果y(i)为上述VMD-GA-BP 预测结果加上误差预测结果e(i),即

图3 VMD-GA-BP-E模型框图Fig.3 Block diagram of VMD-GA-BP-E model
VMD-GA-BP-E模型计算步骤如下:
(1)将原始的摆度时间序列利用VMD 方法进行信号分解[18],以得到多个子序列;
(2)对每个IMF 分量划分输入输出矩阵。设IMF 分量信号时间序列为{x1,x2,x3,…,xn},n为总的时间序列长度。设网络的输入层神经元个数为m,则可构建输入输出矩阵为:其中矩阵前m列是神经网络的输入值,第m+1 列是网络的输出值。总共有n-m组数据,取其中前80%作为训练数据,用来训练所搭建的神经网络,而后20%用作网络测试数据[19],测试网络预测效果;
(3)确定GA-BP结构。设其输入层输出层的神经元个数为m和n。隐藏层神经元的个数h使用经验公式[20]:

其中c取1 到10 之间的整数表示不超过的最大整数,通过训练集试训练获得训练集的均方误差,确定隐藏层神经元个数;
(4)使用GA-BP神经网络对每个IMF分量进行预测;
(5)将所有IMF分量预测结果叠加得到振动信号预测结果;
(6)计算各IMF分量合成信号与原振动信号之间的误差;
(7)利用建立的VMD-GA-BP神经网络对误差序列进行预测;
(8)将振动信号预测结果与误差预测结果相加得到最终预测结果。
其中步骤(1)~(5)即为VMD-GA-BP 模型对振动信号进行预测的具体实施步骤。
3 实例验证
3.1 数据获取及模型设置
为验证本文所提模型的实际效果,选取国内某水电站3 号机组2019 年1 月到2019 年10 月期间上导轴承x向摆度的实时监测数据,共297 次开停机过程。对每次开停机过程的上导x向摆度峰峰值取平均值,构建机组的长期振动趋势序列。图4为机组上导x向振动峰峰值均值序列,可以看出原始的振动序列表现出了强烈的非线性和非平稳性,直接进行趋势预测难以达到理想效果。
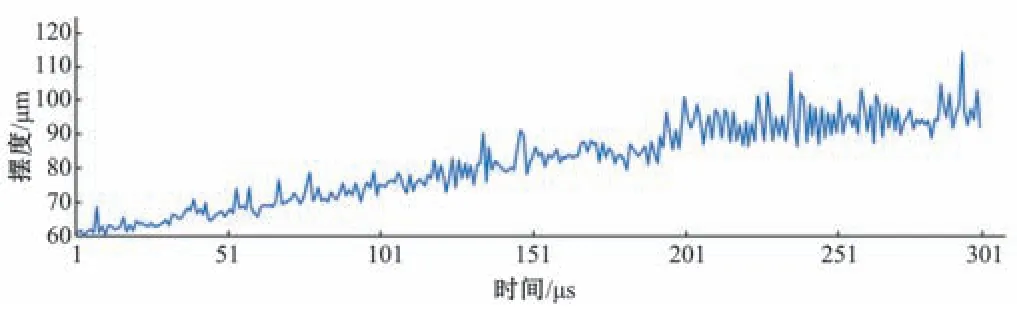
图4 机组上导x向振动序列Fig.4 x-direction vibration sequence of the upper guide of the unit
另外,为验证所提模型有效性,将GA-BP,EMD-GA-BP[21]与VMD-GA-BP 和VMD-GA-BP -E 对振动信号的预测结果进行对比分析。EMD 与VMD 在组合模型中作用相同,EMD-BPGA 实施步骤可参考VMD-BP-GA。各模型中GA-BP 均为8 输入1 输出结构,参数设置:初始种群规模30,最大进化代数50,交叉概率0.8,变异概率0.2,训练次数1 000,学习速率0.01,动量因子0.01。设置VMD 参数:模态系数K 为8,惩罚系数α为1 350,其余参数设为默认值。EMD参数设置为系统默认值。
3.2 实验结果对比
原始振动信号经VMD 分解结果如图5 所示。可以看出VMD 分解后得到的各分量信号相对较为平稳且呈现明显的规律。另外对比原始序列和合成序列可以看出VMD 分解很好的保留了原始信号的大部分特征信息。
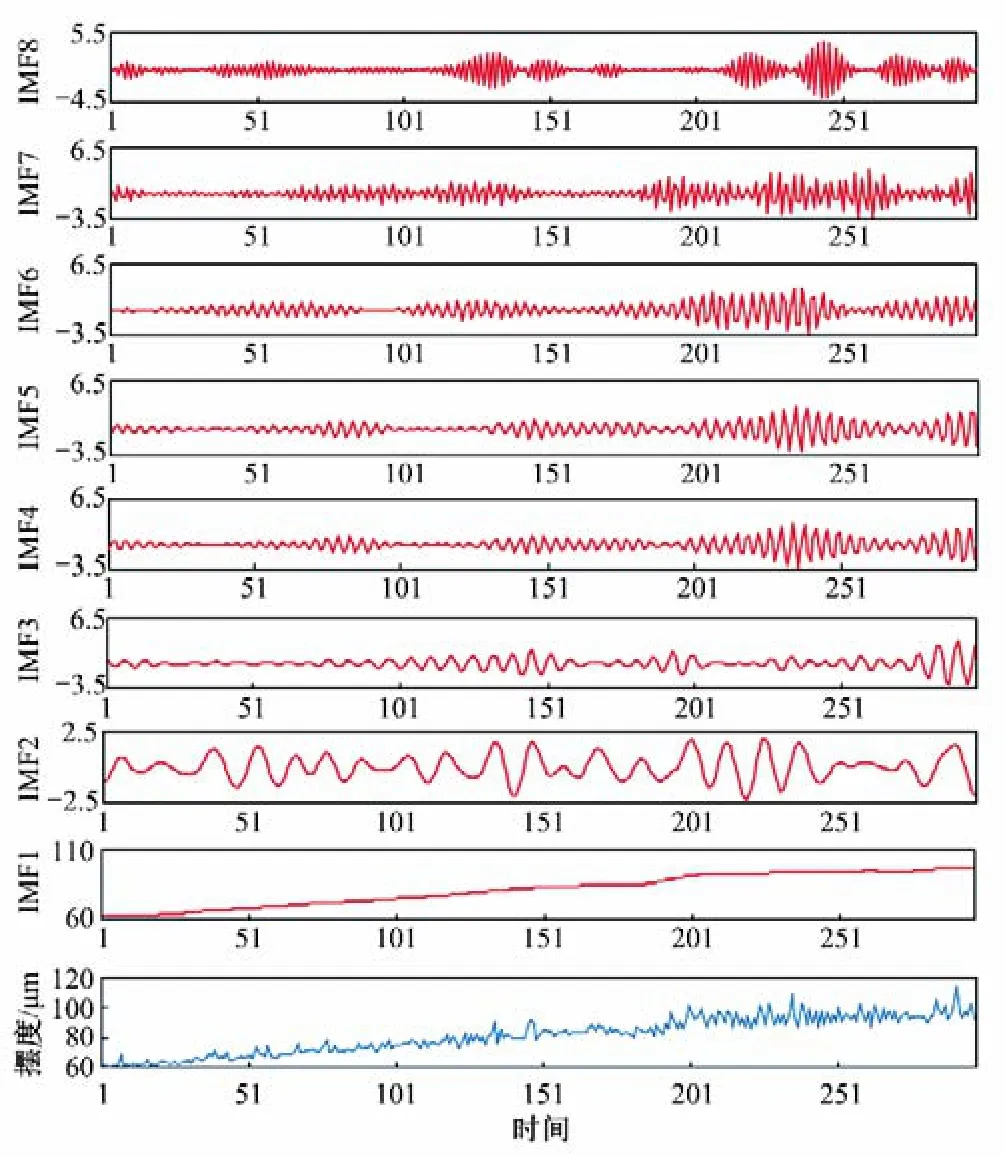
图5 振动序列分解结果Fig.5 Decomposition result of vibration sequence
利用GA-BP网络对所得各分量进行预测,并将所得结果相加,最终所得VMD-GA-BP预测结果如图6所示。
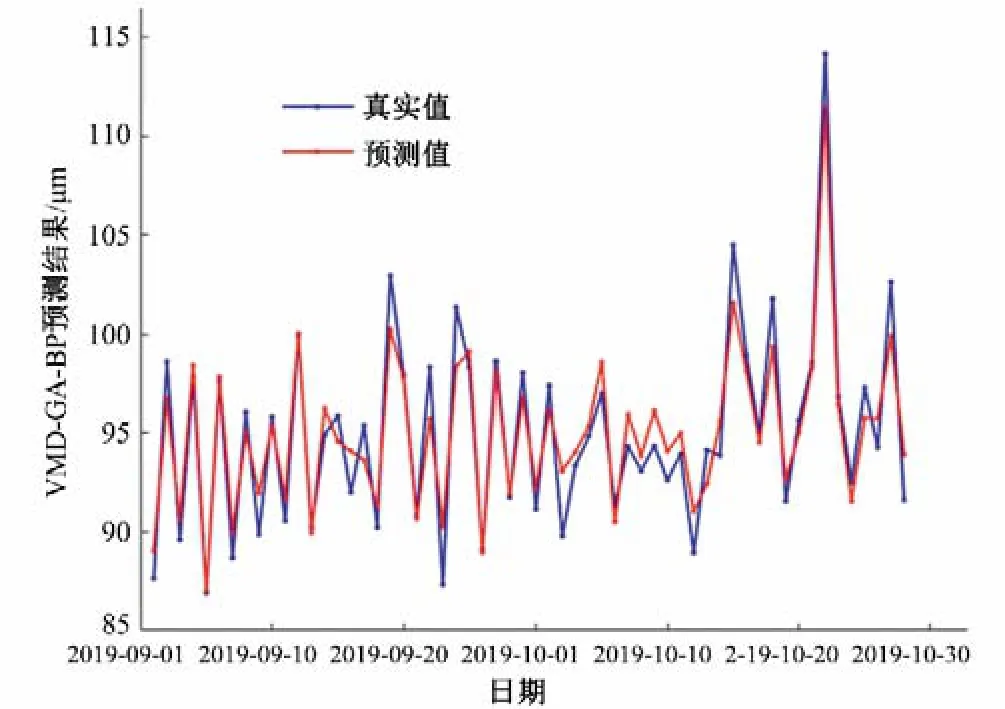
图6 VMD-GA-BP预测结果Fig.6 VMD-GA-BP prediction results
VMD-GA-BP 模型预测误差为:MAE为1.302 1%,RMSE为1.564 2%,MAPE为1.364%,误差较小,可知所构建的VMDGA-BP 预测模型预测精度较高。为了进一步的提高预测的精确度,在VMD-GA-BP 的基础上提出误差校正方法,构建VMDGA-BP-E 预测模型。误差序列如图7所示,针对误差序列同样用上述VMD-GA-BP 预测模型进行预测,所得预测结果如图8所示。
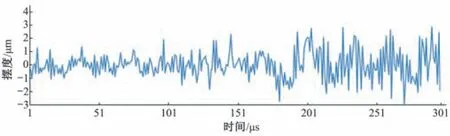
图7 误差序列Fig.7 Error sequence
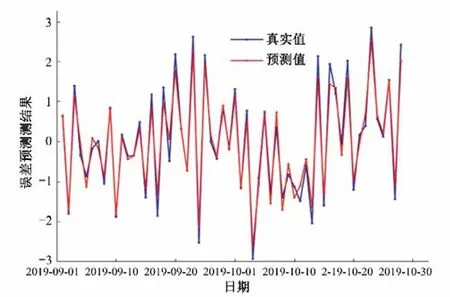
图8 误差预测结果Fig.8 Error prediction results
由实验结果可知,误差预测结果与真实值之间实现了较好的匹配。使用上述误差预测结果对VMD-GA-BP 模型预测结果进行优化,所得VMD-GA-BP-E 组合预测模型所得最终预测结果如图9 所示。VMD-GA-BP-E 预测结果误差:MAE误差为0.476 2%,RMSE误差为0.583 5%,MAPE误差为0.500 2%。由此可见所提VMD-GA-BP-E 模型预测精度在VMD-GA-BP 的基础上有了更进一步的提升,证明了所提误差校正办法的有效性。
对比试验EMD-GA-BP 和GA-BP 预测模型对振动信号的预测结果如图10、11所示。
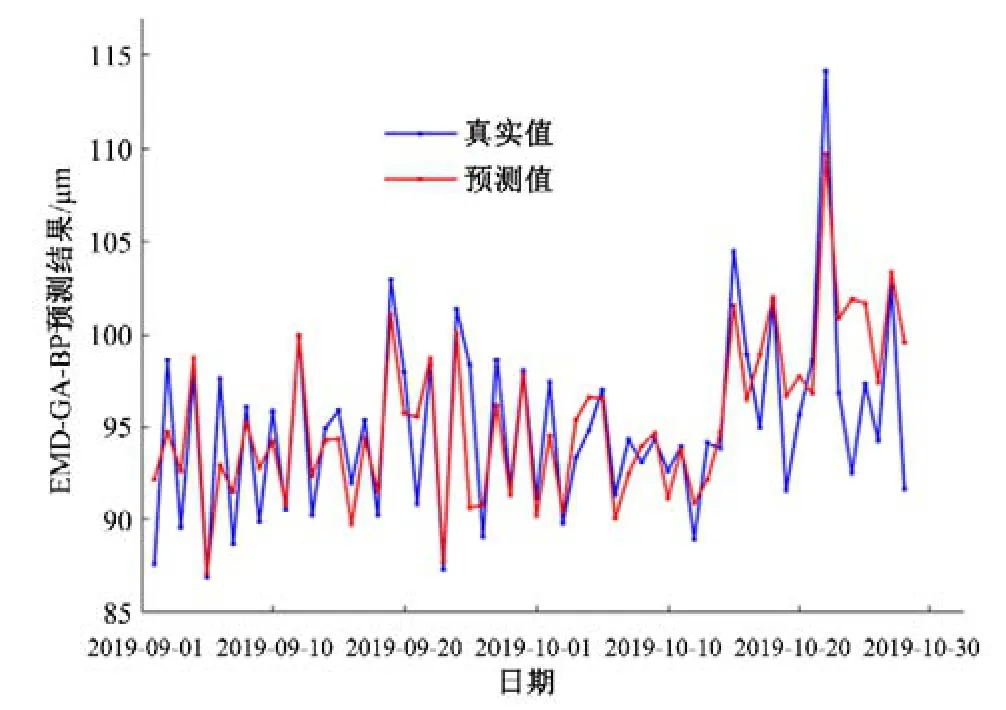
图10 EMD-GA-BP预测结果Fig.10 EMD-GA-BP prediction results
最终本文所提模型与其余各模型预测结果误差如表1 所示,为了更为直观的展示各模型的误差大小,将表中的各误差绘制成直方图如图12所示。
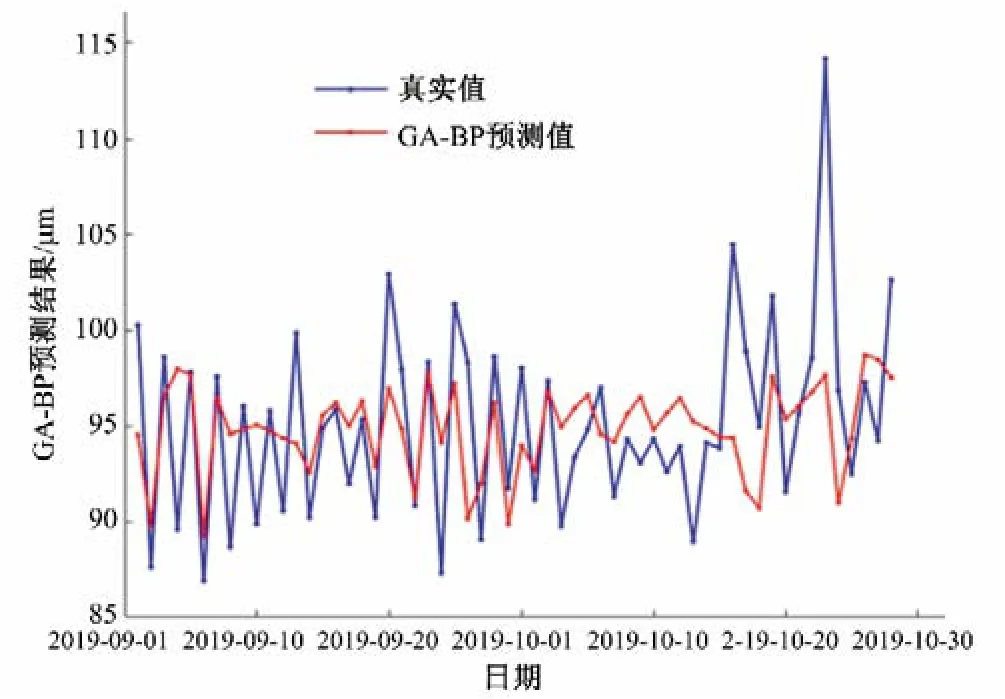
图11 GA-BP预测结果Fig.11 GA-BP prediction results
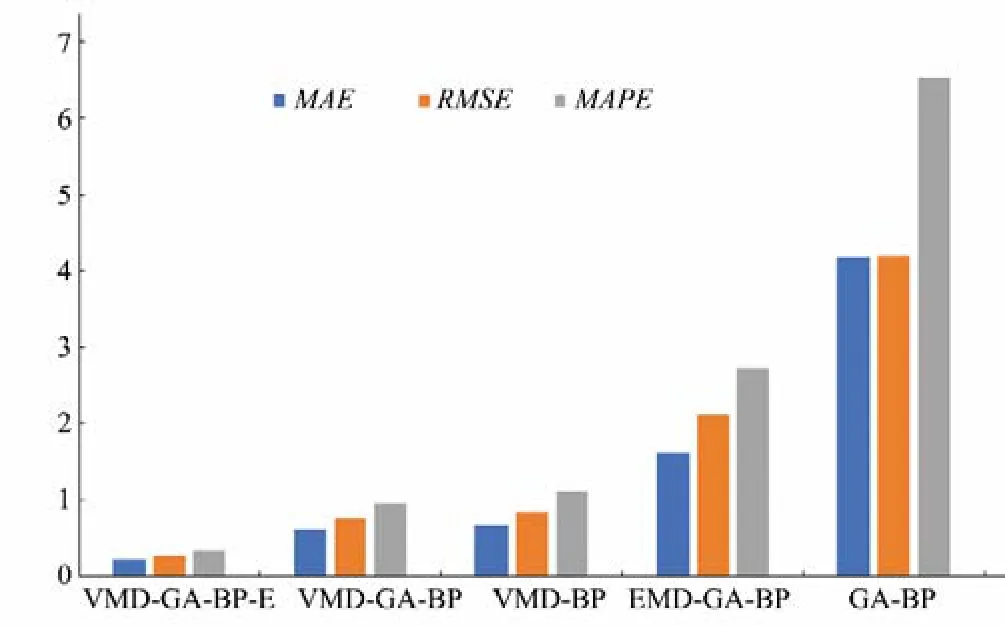
图12 各模型预测结果误差Fig.12 Errors of prediction results of each model
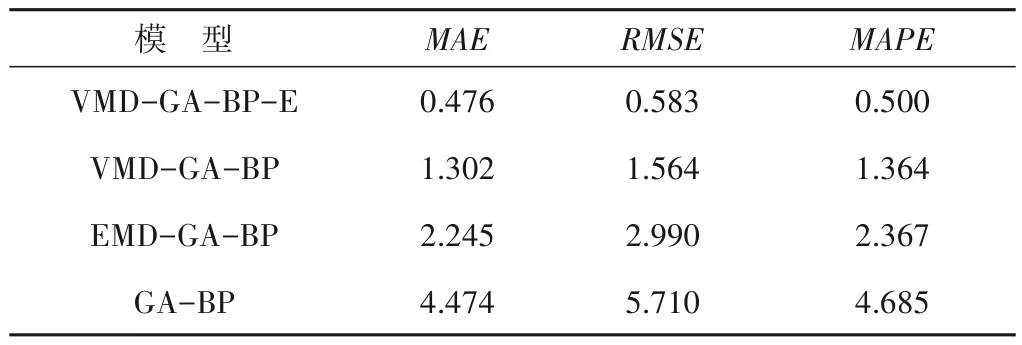
表1 各模型预测结果误差 %Tab.1 Errors of prediction results of each model
通过对比试验可以看出,由于对振动信号进行了VMD 分解,避免了直接预测和模态混叠带来的误差,并且通过误差校正的方法对VMD分解误差进行了误差校正,本文所提模型各项误差指标均明显低于其他模型,在预测精度上相较于其他模型有着较大的提升,证明了本文所提模型对水电机组振动趋势预测的具有可执行性并有具有较大的优异性。
4 结论
机组振动信号反映了机组的大部分故障信息,对机组振动信号的趋势预测可以有效的防止机组故障的发生,保障机组的稳定可靠运行。本文以水电机组的振动信号作为研究对象,结合VMD 和 GA-BP 网络以及误差校正办法提出了VMD-GABP-E 振动趋势预测模型。通过对比分析试验验证了本文所提模型具有很好的预测效果,相较于其他模型,本文所提模型在预测精确度上有较大的提升,可以对机组的振动趋势实现准确有效预测。