船舶航行对河床底泥扰动影响的验证方法浅析
2023-01-25曾宝庆张坤军
胡 聪,张 晔,曾宝庆,张坤军
(1.杭州市西湖区城市管理局,浙江 杭州 310000;2.杭州市城市水设施和河道保护管理中心,浙江 杭州 310003;3.浙江省水利河口研究院(浙江省海洋规划设计研究院),浙江 杭州 310017)
0 引 言
航道河床底泥在外界因素的作用下可能从静止的沉积状态随泥沙运动变为悬浮状态而重新产生淤积,在整个影响过程中,局部淤积将会逐渐累积,容易造成航道阻塞。螺旋桨在推动船舶行驶将会产生尾部射流,此类射流对航道河床底泥起种扰动作用,并可能会造成沉积底泥再悬浮,特别是浅水航道内载重型船舶,其螺旋桨射流远高于一般船舶产生的射流。射流对河床底泥扰动影响因素很多,主要包括螺旋桨尺寸,发动机功率,船舶吨位,水流速度,河床底质条件等。因此,载重型船舶行驶过程中通过螺旋桨产生的射流,是否能够引起航道河床底泥再悬浮而产生局部逐渐淤积应给予足够重视[1-4]。
余杭塘河流经余杭镇、仓前镇、五常街道至杭州,汇入京杭大运河,在航运、旅游等方面发挥重要作用。为验证载重型船舶螺旋桨射流对河床底泥扰动影响,本文采用Norbit iWBMS多波束测深系统对余杭塘河典型航段开展跟踪水深测量,通过对测量数据的对比分析,探讨载重型船舶航行对河床底泥扰动影响程度,为航道运行管理提供参考依据。
1 工作原理
1.1 多波束测深系统工作原理
多波束测深系统的工作原理是利用声波发射换能器阵列向海底发射宽扇区覆盖的声波,同时利用接收换能器阵列对上述声波进行窄波束接收,发射换能器的宽扇形波束与接收换能器的窄扇区波束形成海底地形的照射脚印,对这些照射脚印数据进行综合内业处理,可以得到基于声波波束的点云数据,随着船舶平台的不断移动,从而能够精确、快速测出沿航线一定宽度内水下目标的大小、形状和高低变化,得到精确的水下地形地貌基础数据[5-11]。
1.2 误差统计分析
根据载重型船舶航迹线提取航行前后高程数据,确定航迹线起点,按照航迹线路径计算起点距和高程,将航行前后相同里程高程数据进行对比,得到航迹线上相同里程高程差值Δ,采用均方根误差RMSE、平均绝对误差MAE等统计量对相同里程高程差值Δ进行统计分析。
1.2.1 均方根误差RMSE
均方根误差RMSE代表了相同里程高程差值Δ的离散程度,能够非常敏感地反映Δ中特大或特小值。RMSE数值越小,则表示高程差值Δ的离散程度越低。均方根误差RMSE定义为:

式中:ht为船舶行前高程值,m;为船舶航行后高程值,m;n为点数。
1.2.2 平均绝对误差MAE
平均绝对误差MAE是所有高程差值Δ绝对值的平均。与平均误差相比,平均绝对误差由于离差被绝对值化,不会出现正负相抵消的情况,因而,平均绝对误差能更好地反映高程差值Δ误差的实际情况,其表达式为:

1.3 NORBIT iWBMS多波束测深系统介绍
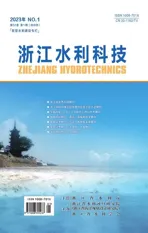
在载重型船舶航行前、后的时间窗口,利用NORBIT iWBMS多波束测深系统对该航段进行跟踪测量。NORBIT iWBMS多波束测深系统主要由采集电脑、甲板单元、表面声速仪、多波束声呐探头、GNSS接收机、外界辅助传感器以及数据采集与处理软件组成,系统组成见图1。
图1 Norbit iWBMS多波束测深系统组成图
NORBIT iWBMS多波束声呐探头集成惯导系统,免去传统多波束安装校准的繁琐过程,大大提高了测量工作效率。其换能器中心工作频率主调频声波为200 kHz或400 kHz,测深分辨率可达10 mm,可以选择连续波(单频)或调频(扫频)工作模式。接收换能器采用圆弧型设计,能够有效接收边缘波束的回波信号,达到更大条带覆盖范围。波束覆盖范围为7°~210°,且具备电子旋转功能,可以根据需要进行侧面扫测。
NORBIT iWBMS多波束测深系统提供了紧密一体化的水深测绘方案,具有高度集成化、扫测范围宽、免校准操作、安装方便、便携等特点[12]。主要技术指标参数见表1。

表1 Norbit iWBMS多波束测深系统主要技术指标表
2 应用实例
本文选取余杭塘河长深高速桥至九曲洋段和航道中载重型船舶进行研究分析,该段航道长约1.65 km,平均宽度约30 m,通过前期静力触探试验发现底泥状态较为稳定,具有较强的代表性,确保与船舶以及河道相关的影响因素一致。
测量前,对NORBIT iWBMS多波束测深系统进行综合测深误差测定,包含内符合和外符合测试两种,结果表明系统具有较高的测深精度,符合JTS 131—2012《水运工程测量规范》测深深度精度要求。在船舶航行前使用多波束测深系统对该段航道进行全覆盖水深测量,随后跟踪载重型船舶航行再次进行水深测量,测量宽度约10 m,局部航行航迹线见图2。为了便于数据对比分析,同时选取了偏离航行航迹线2 m的左右2条平行线(分别为“左平行线”“右平行线”)进行数据统计分析。以0.1 m作为统计区间,统计高程差值Δ所属区间;采用均方根误差RMSE、平均绝对误差MAE等统计量对相同里程高程差值Δ进行统计分析,统计结果见表2~表4。

图2 载重型船舶航行局部航迹线示意图

表2 中央航迹线相同里程高程差值统计表

表3 左平行线相同里程高程差值统计表

表4 右平行线相同里程高程差值统计表
由表2~4可知,中央航迹线、左平行线和右平行线高程差值Δ基本处于-0.1~0.1 m,占比分别为96.86%、92.57%和96.28%,表明载重型船舶在航行过程中,扰动量基本小于10.0 cm,螺旋桨射流对河床底泥扰动并不显著;3条轨迹线高程差值绝对值最大值分别为20.2 cm、33.4 cm、20.2 cm,扰动量均小于40.0 cm,平均绝对误差MAE分别为3.9 cm、4.3 cm、3.9 cm,均小于4.0 cm,均方根误差RMSE分别为4.8 cm、5.8 cm、4.8 cm,均小于10.0 cm,进一步表明载重型船舶螺旋桨射流对河床底泥的扰动作用较小。
3 结 语
本文选择载重型船舶航行前、后的时间窗口,采用NORBIT iWBMS多波束测深系统对余杭塘河典型航段进行跟踪水深测量,结合前期静力触探试验成果,通过对测量数据的对比统计分析,结果表明,在目前水深条件下,载重型船舶螺旋桨射流难以引起河床沉积底泥起动和再悬浮,船舶正常航行在该航道时对河床底泥影响不显著。